
TAGGED: large-deflection, remote-load
-
-
October 14, 2021 at 8:00 pm
Rameez_ul_Haq
Subscriberplease observe the figures below.
MODEL (Modelling Bending on Two Surface bodies):
The remote force is closer to one of the scoped faces than the other.
October 15, 2021 at 1:05 pmpeteroznewman
SubscriberI'm only going to answer the First question. Let's assume that the remote force behavior is set to Rigid. Draw a Free Body Diagram of the two cantilevers and the remote force. Statics demands that the sum of the forces is zero and the sum of the moments is zero.
If the Location of of the upward remote force was exactly half way between the cantilevers, then the Reaction Force is going to be equal and downward.
If the location of the upward remote force was moved along the +X axis a large distance past the +X cantilever so there is a large moment about the Y axis on the structure. Now the Reaction Force on the +X cantilever would be large and downward, while the Reaction Force on the -X cantilever would be large and upward.
I hope this simple example explains why the remote force location affects the Reaction Force on the cantilever system.
October 15, 2021 at 4:37 pmSubscriberthank you for answering. I completely understand what you said, and I was already aware of this phenomenon that when the force does not pass through the centroid of scoped faces, then there has to be a net moment generation and the solver will automatically determine how the extra force which is the equivalent of this moment will distribute over the scoped faces (since it becomes somewhat tedious to calculate the force distriibution onto the scoped faces from moment by hand, if there are a large number of scoped faces.)
What I had the problem with is that why would a RIGID remote force (as shown in this thread) still result in the different force transfer between the two surface bodies? What you explained makes sense for a Deformable remote force, where the two bodies can behave independently from each other once the force distribution from the remote force is done, but for a Rigid remote force, I don't think that the force distribution should be calculated in the same way as like in the Deformable case. Moreover, as I already have mentioned in the thread, that both bodies have the same deformation, same material, same dimensions, then what is the reason that still they have different force transfer? Because the bodies are behaving as if the force transfer should be the same in both of them.
I hope you understood my query.
October 15, 2021 at 11:39 pmSubscriberCreate a beam that goes along the end of the first cantilever, spans the gap between the cantilevers and goes along the end of the second cantilever. Make the beam cross-section larger than the cantilevers and the material Young's Modulus 100 times higher than the material in the cantilevers. The beam will share all the nodes at the end of each cantilever. This beam replaces the Rigid Remote Force. Now you can simply apply the force to one of the nodes on the beam that spans the gap.
If the force is not at the center of the gap, the Reaction Force on the cantilevers will not be equal as explained in my previous post. When the Reaction Force is different on each cantilever, the deformation is not equal. You said you found that the deformation was equal, but I think if you look more closely, you will find that they are not equal.
October 16, 2021 at 8:53 amSubscriber,so what you are saying is that I can calculate the reaction force at each of the support from the concept of statics and it should still be the same, when seen in ANSYS, whether the remote force has a Rigid or Deformable behavior? So it won't make a difference?
October 16, 2021 at 3:27 pmSubscriberFor small deflections, a hand calculation of reaction forces should closely agree with the results from Ansys. If you replace the shell elements on a surface with beam elements on a line, then the hand calculation should exactly match the Ansys result because the supports will be at two points in space and the distance from those to the remote force is easily measured for the hand calc.
For small deflection, since the remote force is scoped to the end of the cantilevers, which are far from the supports, I don't expect the reaction force to change much whether the remote force is Rigid or Deformable.
October 16, 2021 at 3:33 pmSubscriber,I mean you are mentioning 'small deflection' but that is the case if I open the Large Deflection to ON, right? I mean if I just keep it OFF, and no matter how large the deflections are, then you are saying that the force reactions at each of the support shouldn't change whether the scoping behavior is Deformable or Rigid, right?
October 16, 2021 at 4:05 pmSubscriberI mention 'small deflection' because the linear solution would exactly match the hand calculation. In a linear solution, the tip of the cantilever is always the same distance from the support no matter how large the deflection. Once you turn on large deflection, the solution includes nonlinear geometry deformations. With a thin cantilever and a large force, the beam can deflect enough to foreshorten significantly and the distance from the supports to the force is no longer the same dimension it was at the beginning. This will be true for either Deformable or Rigid. With Deformable, the location of the force may end up in a slightly different location than it did for Rigid.
 In a linear solution, if you double the force, the tip just goes straight down twice as far. In the nonlinear solution, if you double the force, the tip moves further in the -X direction, changing the reaction force.
In a linear solution, if you double the force, the tip just goes straight down twice as far. In the nonlinear solution, if you double the force, the tip moves further in the -X direction, changing the reaction force.
October 16, 2021 at 6:53 pmSubscriberthank you for clearing out a point that for a linear solution, the deformations of all the nodes and elements of a body will only be in the direction in which force is applied and not in any other direction.
"In the nonlinear solution, if you double the force, the tip moves further in the -X direction, changing the reaction force.", you meant change in reaction moment, right? For the example you inserted here.
The example that I shared in this thread, I asked why the reaction force along Z direction (transverse force direction) is different when the analysis is Large Deflection ON and when it is OFF. I was thinking that for a deformable case and LD = ON, it can be like this because there can be a loss in geoemtric stiffness in one of the bodies (namely, the body which is supposed to take more force than the other) and hence it will start giving up some force as the analysis progresses, and will eventually end up with a lower force taken than what it takes in LG = OFF case. But for the rigid case, I was not expecting this because both of the geometries were rigidly connected to the remote force, so they would experience the same loss in geometric stiffness as the connection is rigid. So I was not expecting any difference in the reaction forces along Z at the support of each body in LG = OFF and when the LG = ON, since the sole factor that this force distribution would be based on would be the location of remote force only.
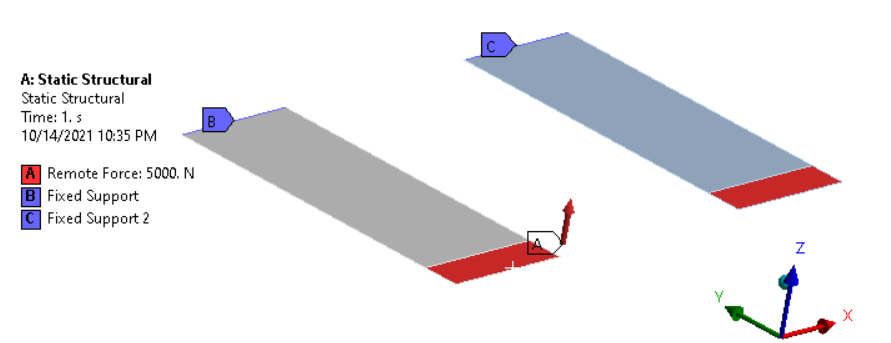
Plus, I just couldn't get over this idea that Deformable and Rigid behaviors will result in somewhat the same reaction forces at each support in a linear solution. I think calculations by hand only applies to the case when the analysis is Linear and the behavior is set to Deformable, not for Linear and Rigid. The reason being there are some extra constraint equations (to make each of the DOF's equal of all the scoped nodes to Remote force) in the global stiffness matrix which also plays a role in determining the force passing through each of the body when in equilibrium. I conducted an example to illustrate and elaborate my point. [This example is different from the one I already shared in the thread]. LINEAR ANALYSIS is conducted and shown below.
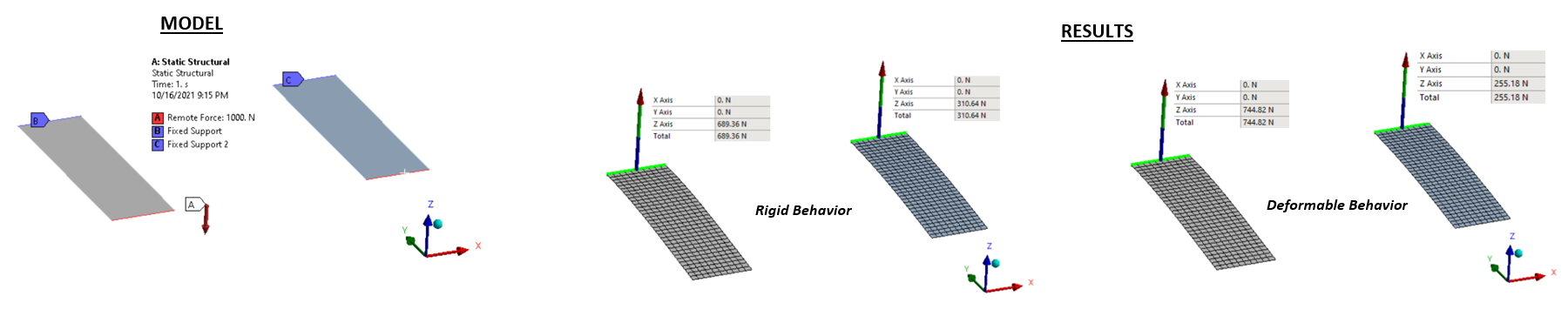 As it can clearly be seen that the reaction forces are different for both of these behaviors, as I expected. We shouldn't care about how big the deflections are since the linear analysis only works on the initially provided inputs and gives us the solution for it only.
As it can clearly be seen that the reaction forces are different for both of these behaviors, as I expected. We shouldn't care about how big the deflections are since the linear analysis only works on the initially provided inputs and gives us the solution for it only.
Can you just get my head over the fact that why do we see a reaction force in X and Y direction when the large deflection is turned ON as compare to when it is OFF, where there is no reaction force along X and Y? I tried conducting an analysis for the above example for both, Rigid and Deformable behavior. It comes out that we have reaction forces in X and Y when LD = ON for both of these behaviors.
October 16, 2021 at 10:03 pmSubscriberWith Large Deflection ON, foreshortening of the tip toward the support would change the Reaction Moment at the support.
Read the ANSYS Help on Remote Point Geometry Behaviors:
https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v212/en/wb_sim/ds_Geometry_Behavior.html
You will find Deformable uses a formulation similar to the Mechanical APDL constraint defined by the RBE3 command, linked to below.
https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v212/en/ans_cmd/Hlp_C_RBE3.html
You will find Rigid behavior is similar to the Mechanical APDL constraint defined by the CERIG command, linked to below.
https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v212/en/ans_cmd/Hlp_C_CERIG.html
Both the RBE3 and the CERIG elements are only valid for small-deflection analysis, large-deflection is not supported.
I suggest you look at the input files or the solution output to see what kind of elements are being created in these models. What type of element is created with Large Deflection ON? What type of element is created with Large Deflection OFF? Let's limit the discussion to Large Deflection OFF until you answer that question.
Let's see if you can make sense of the difference between a CERIG element and an RBE3 element in the context of a small-deflection analysis.
When you read about RBE3, you will find this is a Force Distributing Element. The independent node is where the force is applied, and a set of dependent nodes is where the force is distributed. Weighting Factors are used to distribute the force to the nodes based on the location of each node. If the dependent nodes are colinear, then one of the independent node rotations that is parallel to the colinear direction cannot be determined in terms of the translations of the dependent nodes. Therefore, the associated moment component on the independent node in that direction cannot be transmitted. When this case occurs, a warning message is issued and the constraint equations created by RBE3 are ignored.
You haven't shared your model, but it looks like you have a set of colinear nodes. I can't tell if the Force location is on the same line. If it was off the line in the Y direction, this might cause the moment component to be ignored. Did you get a warning in the solution output?
A CERIG is easier to understand because you could replace it with a very stiff beam between the ends of the cantilevers and get a very similar result.
This illustrates a key difference between Deformable (RBE3) and Rigid (CERIG): Deformable is distributing the force to the cantilevers without adding any stiffness while Rigid is adding stiffness to the structure.
October 17, 2021 at 2:36 amSubscriberThat last sentence is key to understanding why Deformable and Rigid behaviors would give different reaction forces, the force is being applied to fundamentally different structures: one is stiffer than the other.
October 17, 2021 at 6:18 amSubscriberFor a dramatic illustration of the change in reaction force from using Deformable vs. Rigid Behavior of a Remote Force, try putting the two cantilever beams above and below each other instead of side-by-side.
October 17, 2021 at 1:59 pmSubscriber,"I suggest you look at the input files or the solution output to see what kind of elements are being created in these models.", I mean if you are telling me that Rigid element in ANSYS Workbench relates to a CERIG element while Deformable element relates to a RBE3 element, then I am not going to question it. Since I don't know where to look up for this solver output file; its too long to search for these small inputs.
"You haven't shared your model, but it looks like you have a set of colinear nodes.", Yes, you are right that the set of nodes are colinear and the remote force location (independent node) is also lying on the same line with no translation in the Y axis at all. Althought I still didn't quite gripped the idea that why would it be a problem even if I translate the remote force along Y axis So what I was thinking is that the constraint equations which are created by the deformable behavior (or RBE3, as you further clarified) will not have a say in determining the displacements within the model. They are just, as you mentioned, used for simple force distribution and are not a part of the global matrix equation, right? Ofcourse, after the force distribution, these forces will be a part of the global stiffness matrix equation but the set of constraint equations from where they are calculated, those equations will be not.
For the Rigid behavior (or CERIG element), there are some extra constraint equations created by the solver like making each DOF of each node become equal of the scoped faces, ontop of the ones as created by the RBE3 element for force distribution. Therefore, the force distribution also becomes an integral part of the global stiffness matrix equation unlike in the RBE3 case, where it is not and is just independent of the behavior of the topologies it is scoped to during analysis. Am I correct, sir? [I have only considered a SMALL DEFLECTION case here for both, RBE3 and CERIG elements]. And this the reason why we see different forces passing through each body when in equilibrium.
I would like your approval on the above comments I made, sir. Thank you.
October 17, 2021 at 2:06 pmSubscriberFurthermore, you mentioned, "That last sentence is key to understanding why Deformable and Rigid behaviors would give different reaction forces, the force is being applied to fundamentally different structures: one is stiffer than the other.", but the additional stiffness that is being added due to the Rigid behavior is still going to be equal between the two bodies, right? So ultimately, there is no difference between these two bodies because we are adding the stiffness equally in both. So it shouldn't change the reaction force results, isn't it? Anyways, we both agree that using hand calculations by using the concept of statics will not give correct reaction forces even if we are doing a linear analysis, but if the scoping is Rigid, right? For Deformable, yes it would. But for Rigid, I don't think so.
October 17, 2021 at 3:12 pmSubscriberDeformable Remote Force (RBE3 element in a linear analysis) distributes the force without adding stiffness to the structure. If you perform the same calculation to determine how the RBE3 will distribute the force to each node and apply the nodal forces yourself, you will get a very similar result.
Forces applied to nodes do have a say in the displacements in the model: F = K.X, double the force, double the displacement. Forces don't have a say in the stiffness of the structure, K = F/X which is the same as 2F/2X.
Rigid Remote Force (CERIG element in a linear analysis) rewrites the stiffness matrix, giving you a stiffer structure than what you had before you added the Rigid Remote Force. When using this, think about adding very stiff elements between the scoped faces/edges.
Forces do not become part of the global stiffness matrix [K], they are in the system of equations that are solved [K]{X} = {F}.
October 17, 2021 at 3:44 pmSubscriberthank you for replying back, sir. I would be glad to have a detailed conversation with you on Skype someday with respect to this topic. Thank you for helping :)
October 17, 2021 at 6:47 pmSubscriber,since we have already talked alot about this topic, I would like to pitch in one more query here, for the sake of understanding.
For a solid body, we know that if we scoped a remote force (rather rigid or deformable), it will always be resolved to forces onto the nodes of the scoped faces. Thats because the solid body doesn't have any rotational DOFs onto its nodes hence no moment transfer since so resistance to moment. For a surface body, it has got all 6 DOFs on its nodes. So the remote force still resolves to forces only when scoped to edges or faces of surface bodies, or it gets resolved to forces + moments at each of the scoped nodes?
October 18, 2021 at 5:24 pmSubscriberFor small-deflection linear models, we get back to the fundamental difference between Deformable and Rigid Remote Force. For Deformable behavior, read the link I provided above to the Ansys Help on RBE3 elements. An RBE3 element literally distributes the remote force to nodal forces and moments based on a weighting function, and does not add any stiffness to the structure.
Rigid Behavior is very different in a linear model. Read the link I provided above to the Ansys Help on CERIG elements. It creates constraint equations that impose a constraint on the displacement of the dependent nodes such that they follow the displacement of the independent node. There are no forces put on the dependent nodes, they are not even in the matrix that is sent to the solver! Only the independent node has a force. The constraint equations create the required displacement in the dependent node. These equations add stiffness to the structure.
October 19, 2021 at 1:03 pmSubscriber,sure. I will definitely go through the links you attached here.
So yes, for deformable behavior, the scoped nodes experience forces as well as moments, right? If the body is a surface body. However, if it is a Solid body, then the the remote force resolves to forces only onto the scoped nodes, right?
October 19, 2021 at 8:39 pmSubscriberhere is the paragraph from the RBE3 Help...
RBE3distributes the force/moment applied at an independent node to a set of dependent nodes, taking into account the geometry of the dependent nodes as well as weighting factors. The force is distributed to the dependent nodes proportional to the weighting factors. The moment is distributed as forces to the dependent nodes; these forces are proportional to the distance from the center of gravity of the dependent nodes times the weighting factors. Only the translational degrees of freedom of the dependent nodes are used for constructing the constraint equations. Constraint equations are converted to distributed forces/moments on the dependent nodes during solution.
October 20, 2021 at 7:53 amSubscriber,understood. So either it is surface body nodes or solid body nodes, the remote force or moment will always resolve to forces onto the dependent nodes for RBE3. Thank you for pointing it out :)
November 11, 2021 at 6:22 amSubscriber,please observe the picture that you shared in this thread, below.
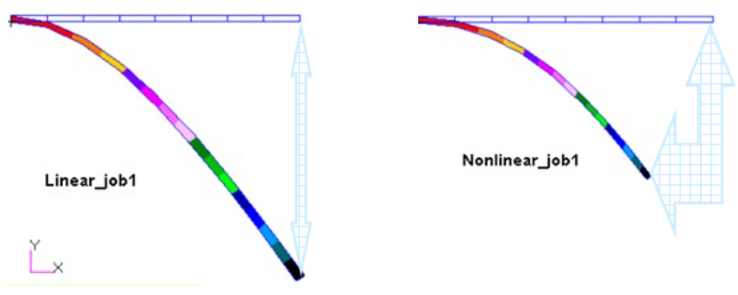 So whenever I use a non-linear analysis (Large Deflection = ON), there will be shortening of the beam in the X direction, meaning that there exists some forces along the X direction which comes from nature (although I am not entering manually any external force in the X direction). Since there exist no external force on the above beam, hence the reaction force along X axis must also be zero. However, the effect of this extra force along X axis because of this shortening is felt by the moment (about Z axis). Am I correct, sir?
So whenever I use a non-linear analysis (Large Deflection = ON), there will be shortening of the beam in the X direction, meaning that there exists some forces along the X direction which comes from nature (although I am not entering manually any external force in the X direction). Since there exist no external force on the above beam, hence the reaction force along X axis must also be zero. However, the effect of this extra force along X axis because of this shortening is felt by the moment (about Z axis). Am I correct, sir?
November 11, 2021 at 12:40 pmSubscriberI would use the word foreshortening, which means to project the deflected shape onto the X axis. The projected length is shorter, but the physical length along the curve of the beam is actually a tiny bit longer.
The beam is a tiny bit longer because the angle between the beam axis and the force is no longer 90 degrees at large deflections. In the nonlinear graphic, it looks more like 135 degrees. In the element at the tip, the vertical force at 135 degrees to the beam axis can be decomposed into axial tension and bending moment. The tension makes the beam a tiny bit longer by an insignificant amount.
There is no net force along the X axis.
Viewing 22 reply threads- The topic ‘Why is the force transfer changing when I turn Large Deflection ON with a Rigid Remote Force?’ is closed to new replies.
Innovation Space Trending discussions
Trending discussions Top Contributors
Top Contributors
-
peteroznewman
 6795
6795 -
scabo
 1906
1906 -
Dennis Chen
 1491
1491 -
javat33489
 1333
1333 -
NickFL
1152
Top Rated Tags
© 2026 Copyright ANSYS, Inc. All rights reserved.
Ansys does not support the usage of unauthorized Ansys software. Please visit www.ansys.com to obtain an official distribution.
-





The Ansys Learning Forum is a public forum. You are prohibited from providing (i) information that is confidential to You, your employer, or any third party, (ii) Personal Data or individually identifiable health information, (iii) any information that is U.S. Government Classified, Controlled Unclassified Information, International Traffic in Arms Regulators (ITAR) or Export Administration Regulators (EAR) controlled or otherwise have been determined by the United States Government or by a foreign government to require protection against unauthorized disclosure for reasons of national security, or (iv) topics or information restricted by the People's Republic of China data protection and privacy laws.
