Dear @peteroznewman
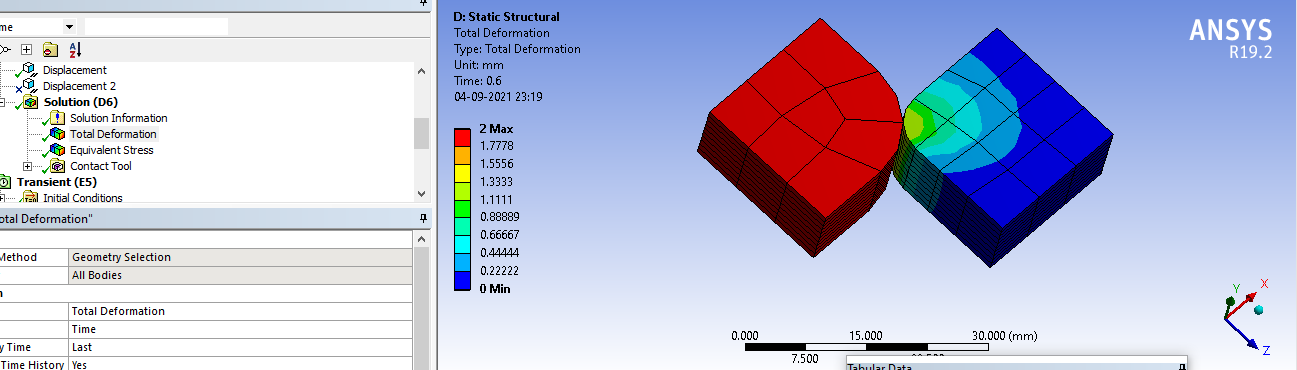
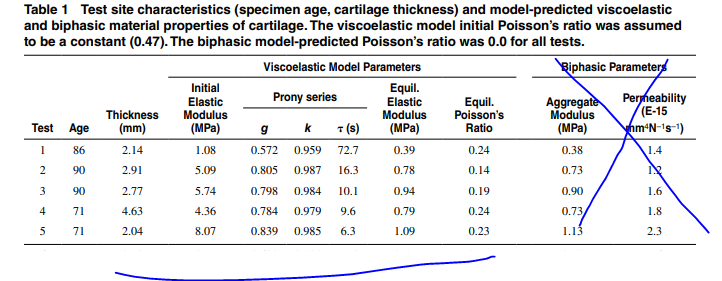
greetings of the day...i am trying to perform a static structural analysis of knee joint. My model involves 10 parts (including ligaments cartilage etc) and 13 contacts (frictional and bonded). To save time I tried to simplify the model and started experimenting on it.
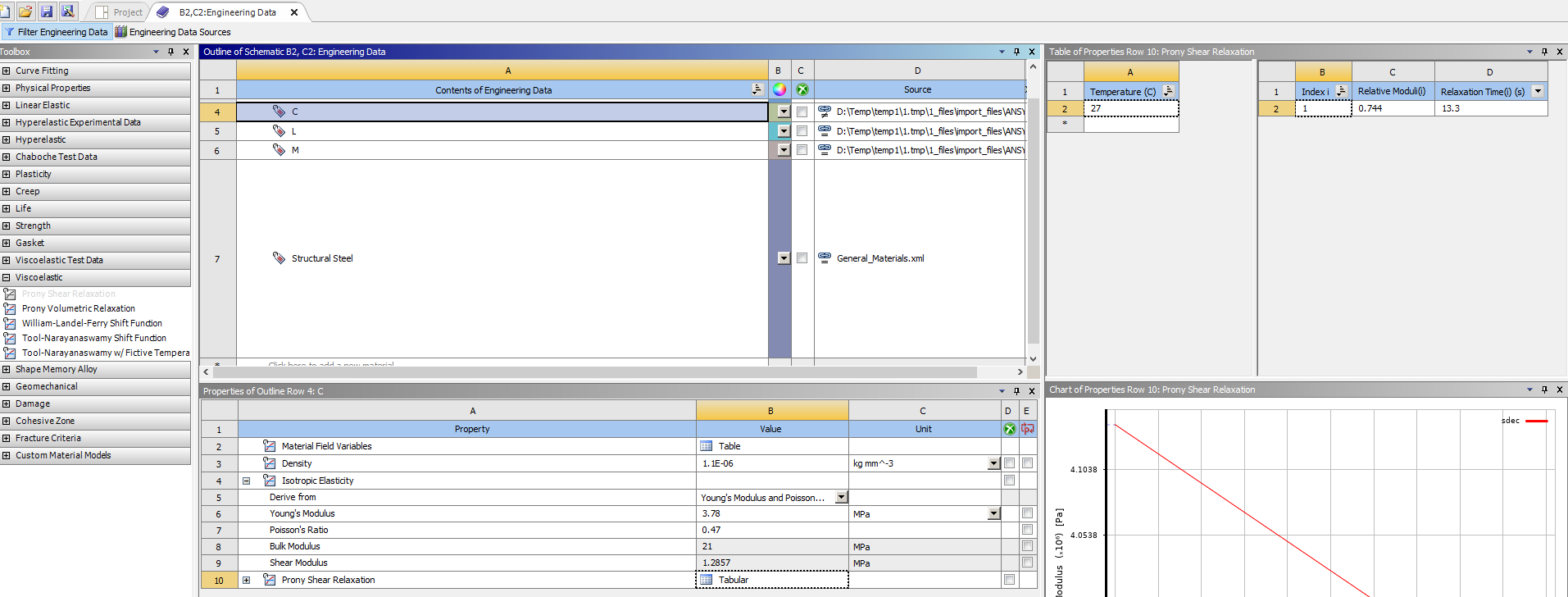
Mesh is created in Altair hypermesh software and it is exported as cdb file to Ansys wb.
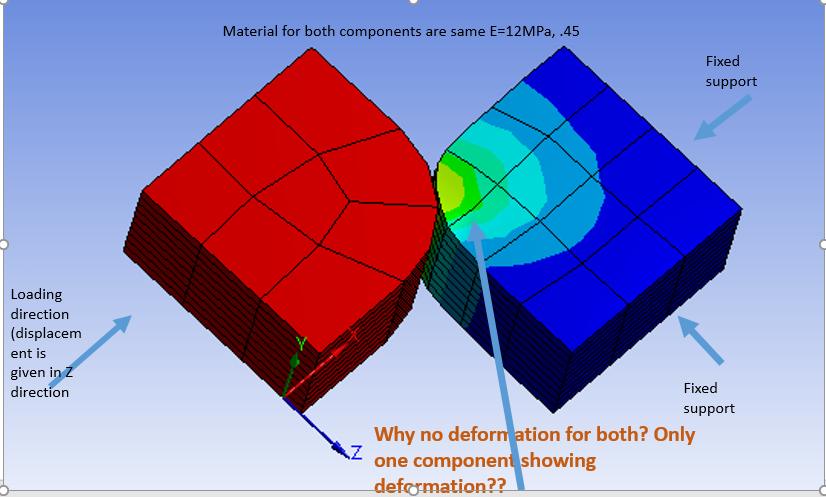
In ansys workbench i have created contacts,boundary conditions,loading.
I went through all discussions on biomechanic contacts in this forum before writing to you.
I also went through youtube tutorials by ansys learning page.
I have tried the following with respect to contact.
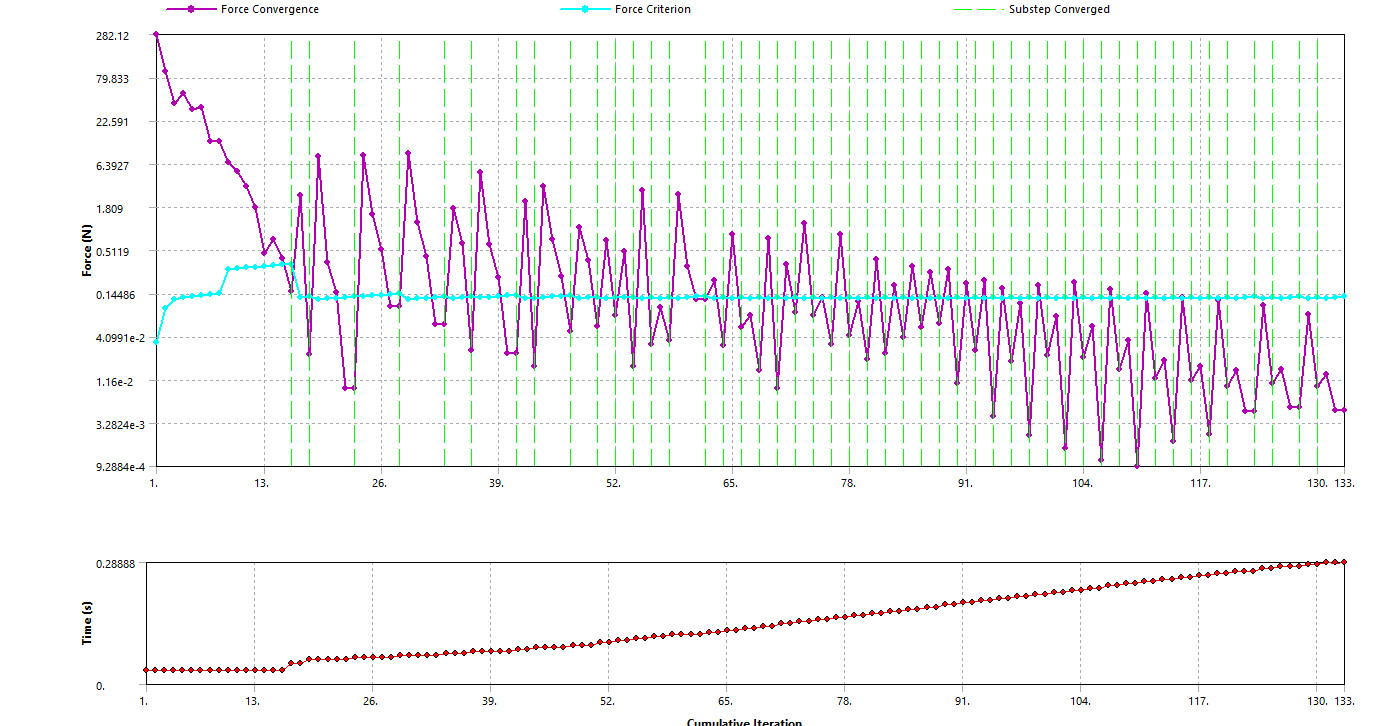
- different formulations tried with different detection methods to get convergence.
- changing the normal stiffness inorder to achieve convergence.
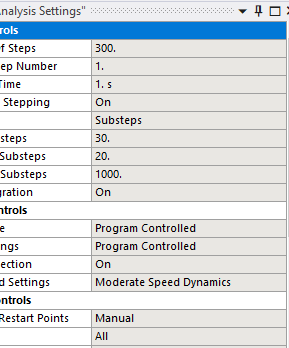
- increasing the number of substeps to apply displacement load slowly to achieve convergence
- tried changing the behavior of contact as explained in youtube video by ansys learning page.
- contact interface treatment also tried to change.
- mesh is refined using solid 185 elements in hypermesh.
- Even after all these i am not able to get the convergence.. Can you help?
- i can send the simplified model to you.
Thanks for your time and help. have a great day!.