Hello , after many days I have solved the problems
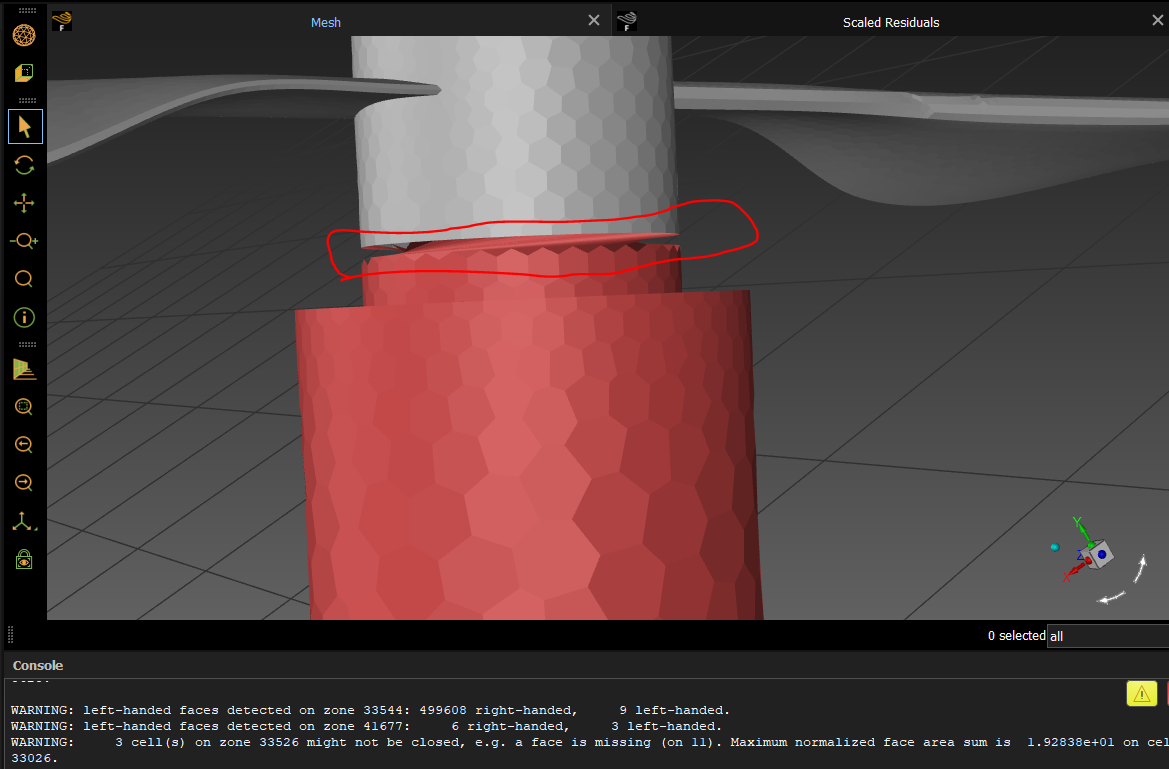
the solution is two fold, first the domain interfaces have to be assigned as "internal" BCs when meshing in fluent then later assigned as interfaces, it doesnt works if they were walls with share topology or interface from meshing for some reason.
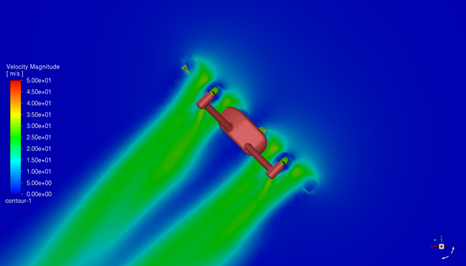
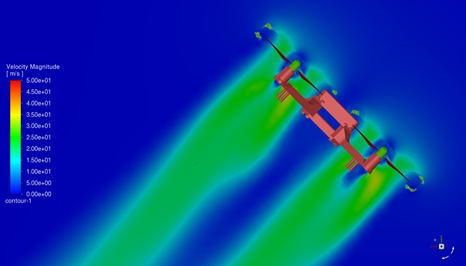
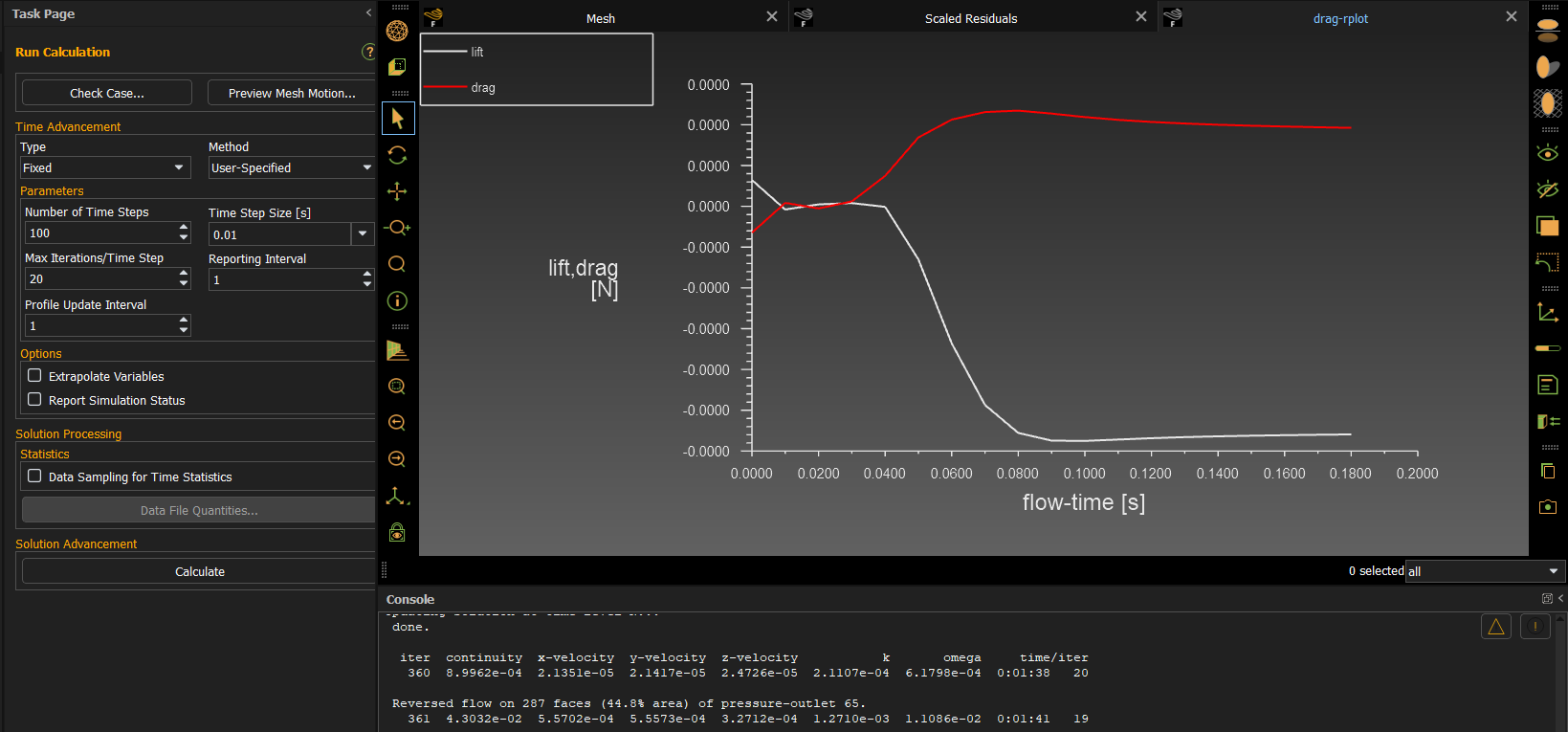
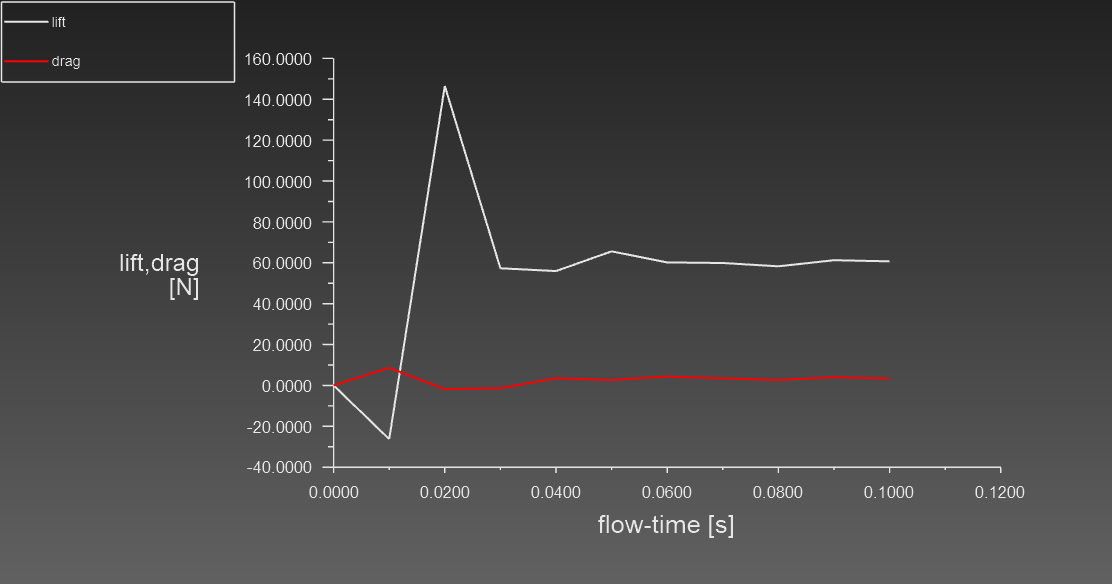
the second thing is changing the rotor speed from 10k rpm which is what I was using to 50k rpm genrated approximatly 13.5N of lift and -13.5N of drag (negative drag is forwards thrust), forwards and upwards forces are almost identical because the drone is pitched forwards at 45 degress,which is logical since a 200mm*200mm drone with 130mm rotors weighs between 300-700 grams, then the lift is sufficient.
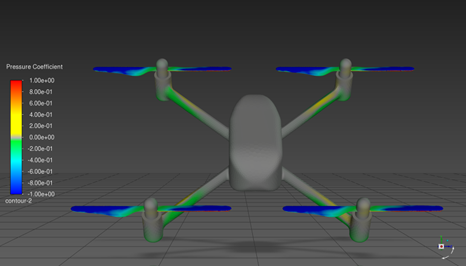
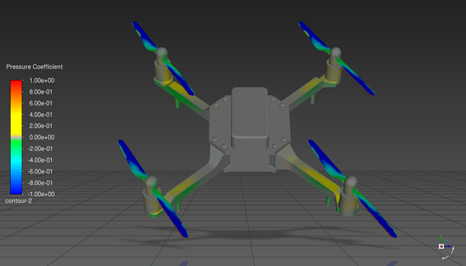
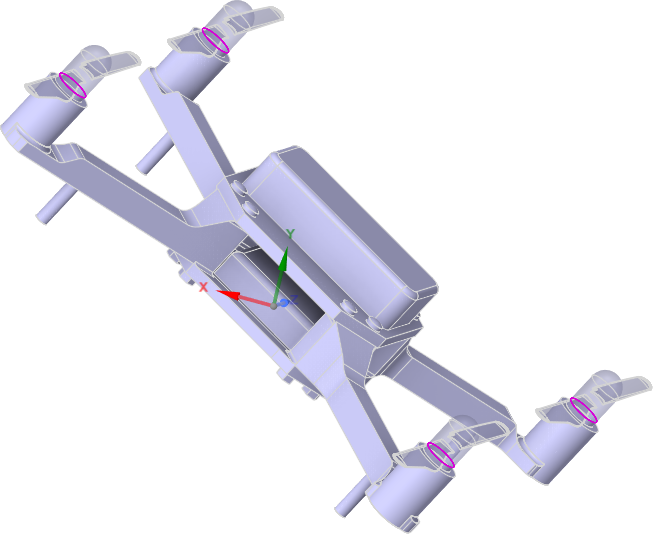
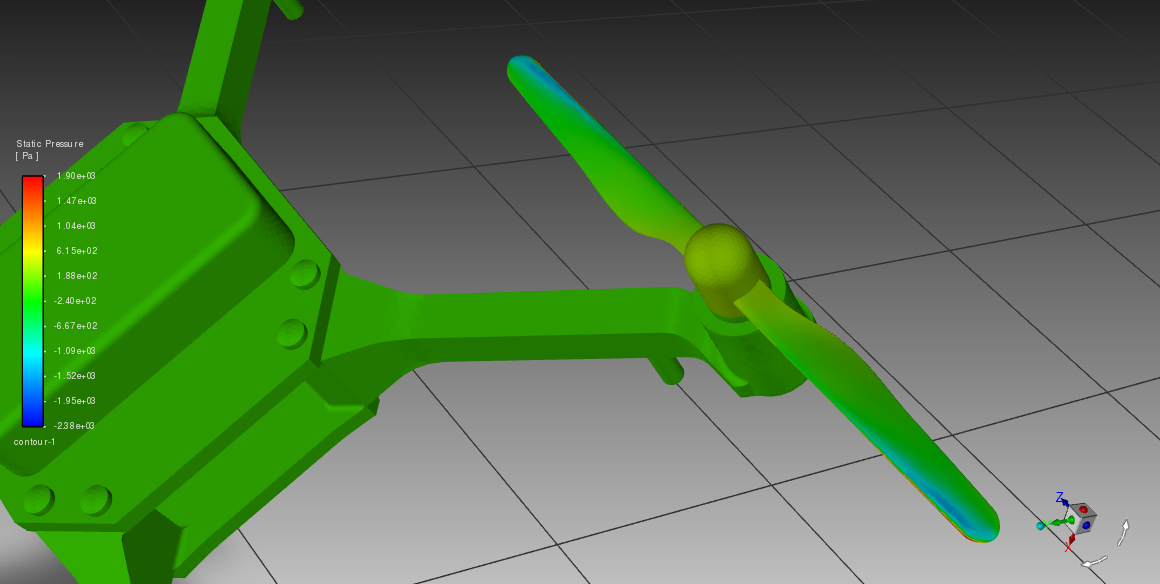
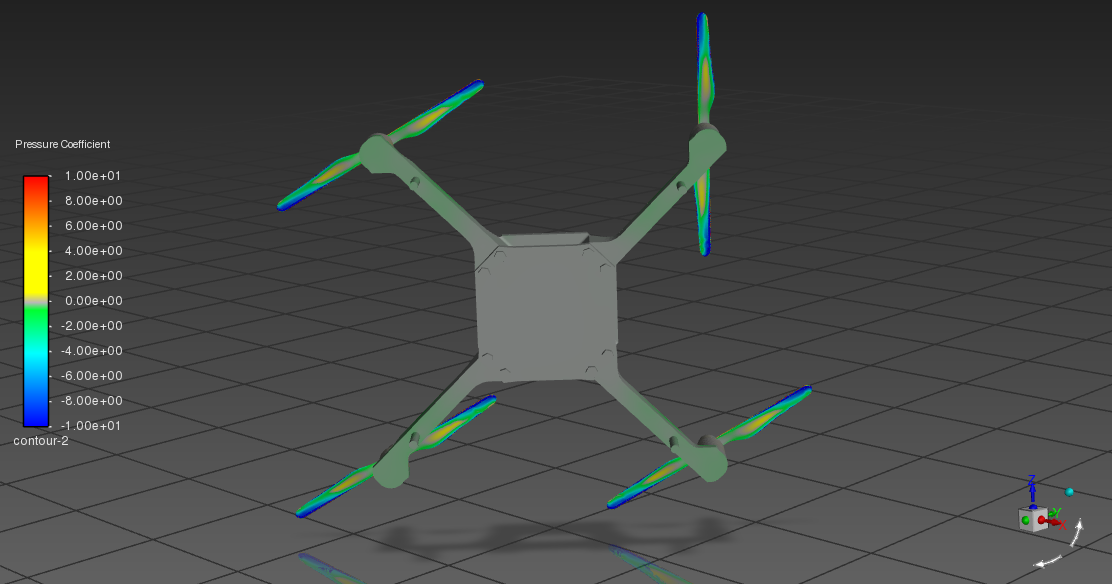
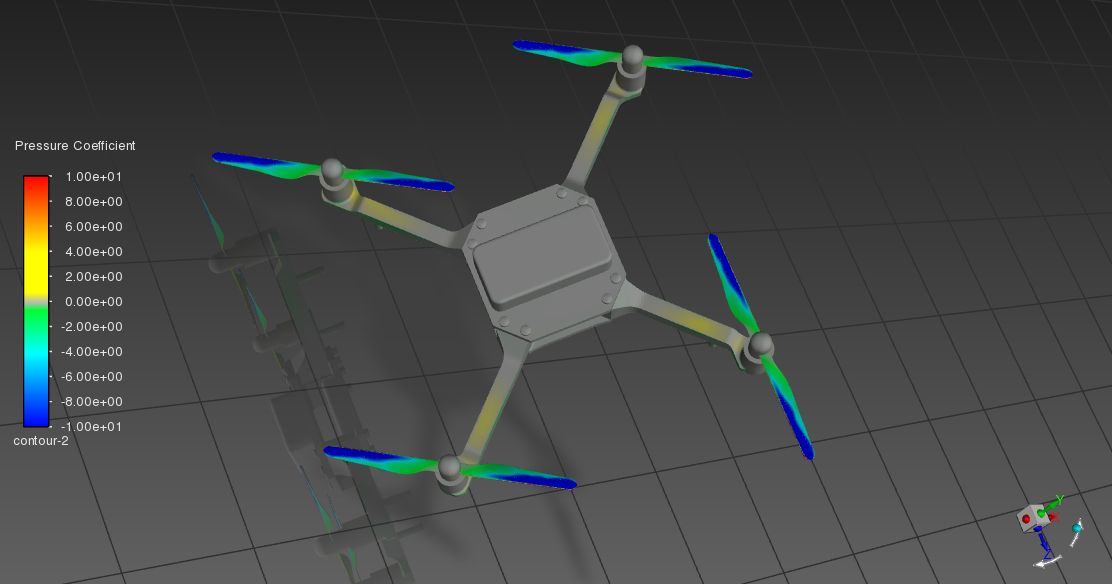
I already knew that "per zone" force prints the force on each component, in my case the walls: (drone, fl rotor, fr rotor, rl rotor, and rr rotor), even though that wasnt the solution to my low lift problem it was the low rpm, that report has shed light onto a very important observation for the report which is the drone body force acts against the rotors' force, so drone body has negative lift and positive drag, which is the next step of my study of streamlining the drone's body so it can produce more lift and less drag so the pverall thrust is more due to changing the shape of the body from that exposed shape in the above photos that represents a DIY kit sort of drone to a streamlined body that is more representative of a body that can be made using 3D printing or an injection molding from an off the shelf product.
the problem is considered solved.