I see you have 12 rods that you want to connect with a spherical joint and a spring that creates a restoring moment proportional to the angle change. This can be achieved by using a COMBI250 element.
Open ANSYS Help and paste the following into the Browser window.
https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v221/en/ans_elem/Hlp_E_COMBI250.html
This element defines 6 spring constants between two nodes. Three translational spring constants and three rotational spring constants. By using large values for the translational spring constants, such as 10^8 N/m and small values for the rotational constants, you will effectively have created a spherical joint that has a restoring moment to return the rods to their initial angles.
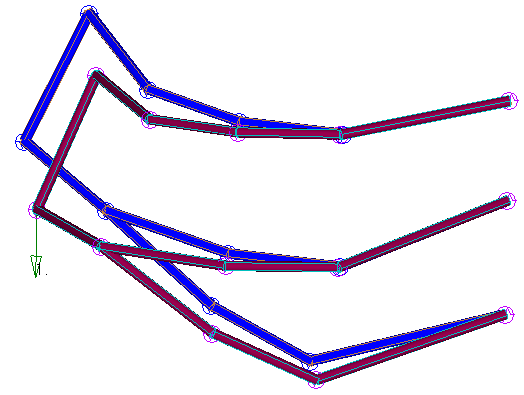
Open SpaceClaim and create 12 new Components. Draw one rod in each Component as a line body. Separate components assures that when two rods meet at a common point, they each get a node on the end and don't share a node as that would weld the rods together into a single structure. Create an extra Component call it Ground that has three nodes to connect with a node on one end of rods 1, 9 and 12. You can draw the triangle defined by the three ground points. For the rods, if it is easier to draw solids than lines, you can do that and use the Prepare tab to convert the solids to Beam elements.
Make an exploded view sketch with shortened rods so that there is a gap between the ends of the rods to leave room to draw a short COMBI250 element. Number all the nodes and elements (Ground nodes, Rod nodes and elements and COMBI250 elements).
To make the connection where three rods: 6, 7 and 10 come together, there will be two COMBI250 elements, one connecting 6 and 7 and another connecting 6 and 10.

In future posts, it is better to insert the image into the post using the Image button, rather than attaching a file because ANSYS employees are not allowed to download attachments.