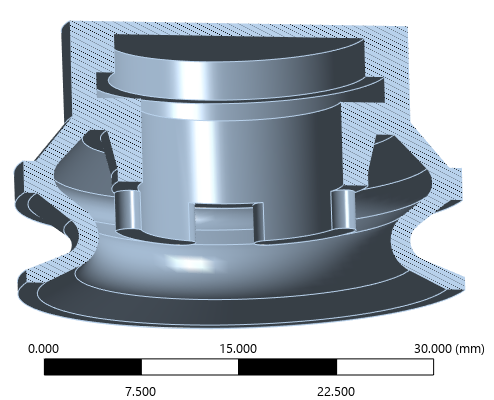
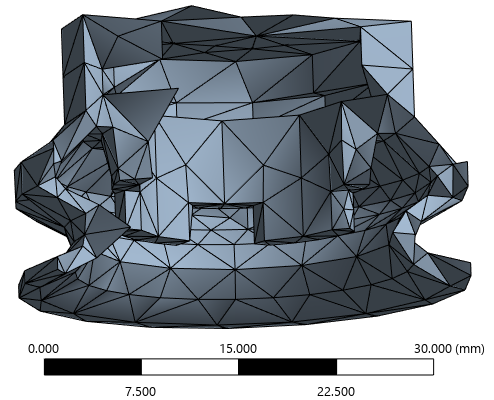
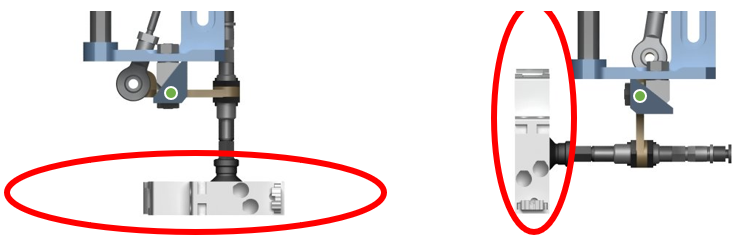
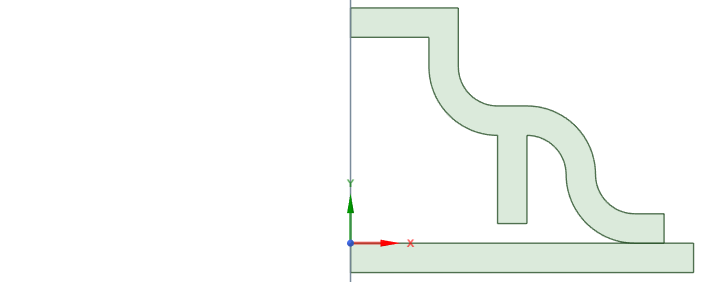
Here is a cross-section of a suction cup sitting on a base plate.
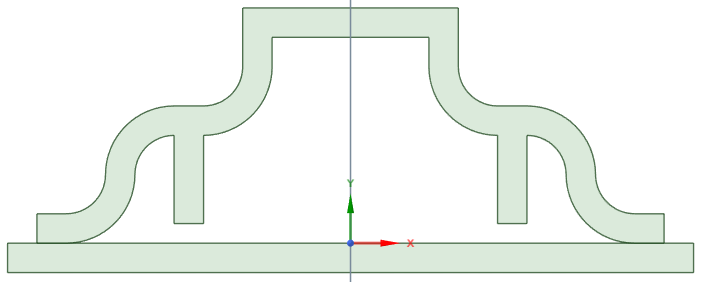
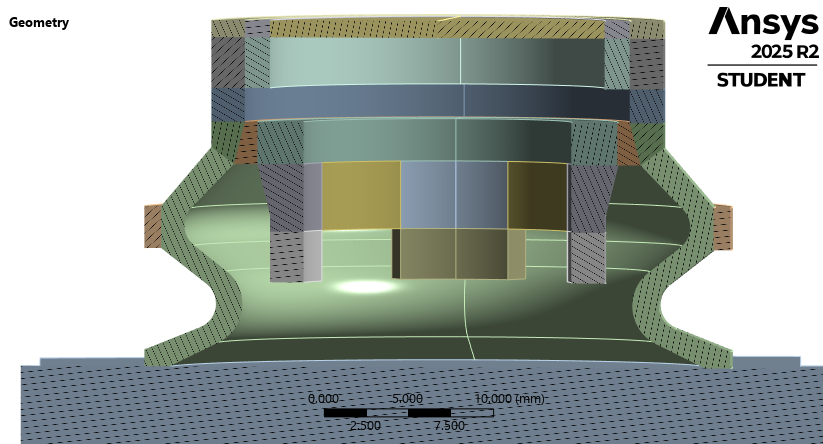
Since this is axisymmetric geometry and I will apply axisymmetric loads, I will solve this as an axisymmetric model which means I only mesh the radial slice on the X-Y plane.
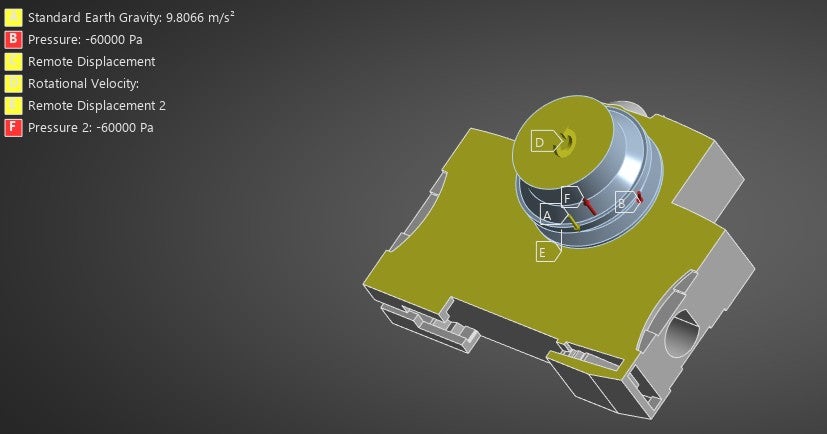
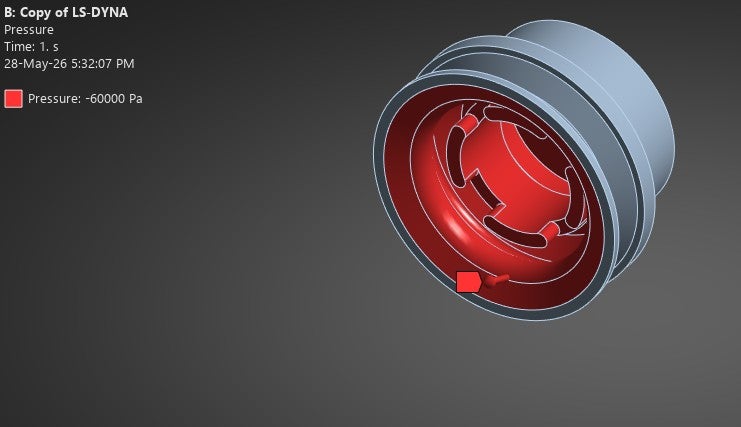
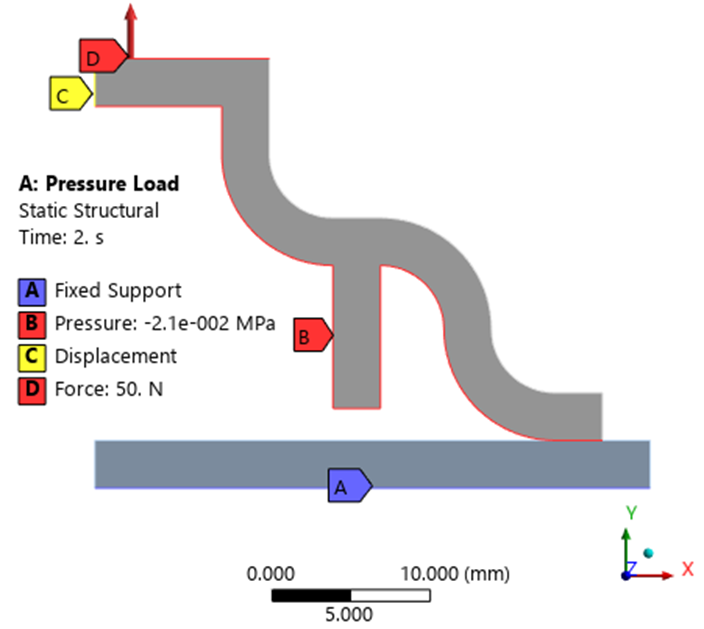
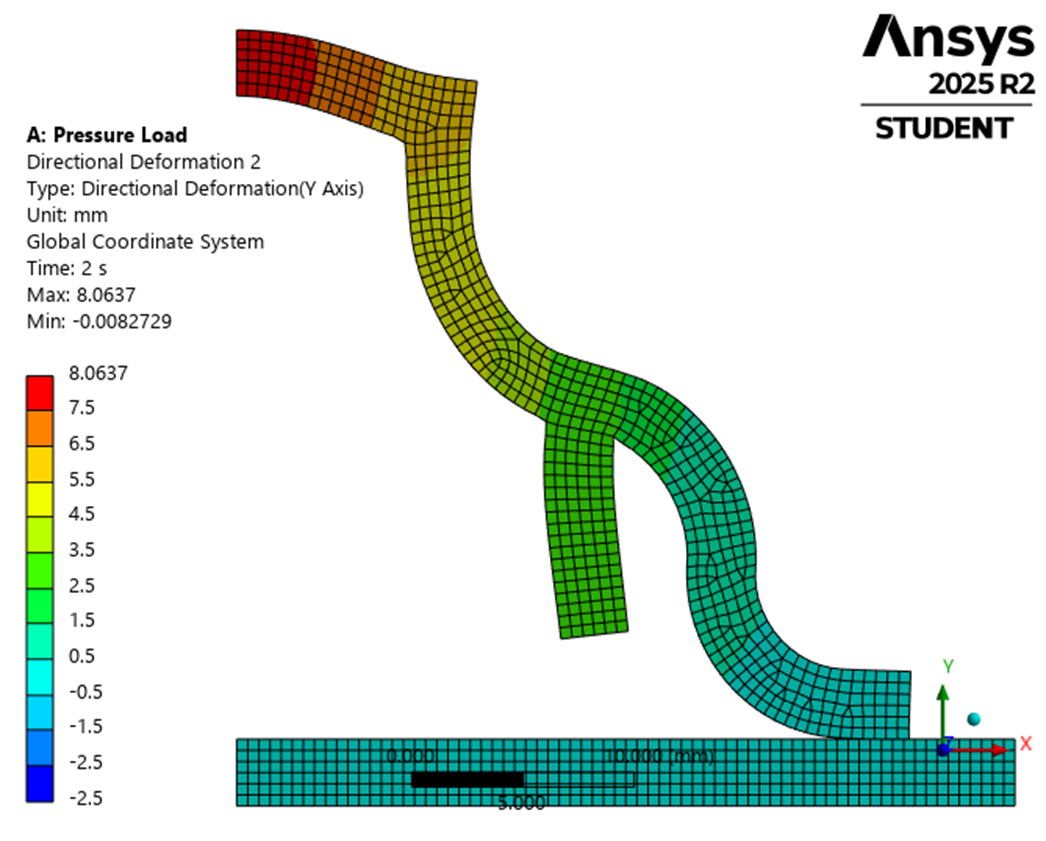
There are two models, one has a negative (vacuum) pressure on the inside faces of the suction cup and a lift force on the top in a two step analysis.
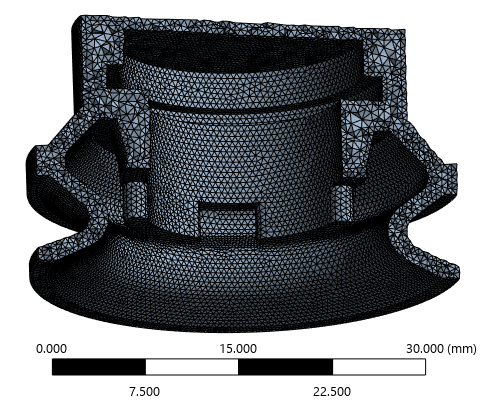
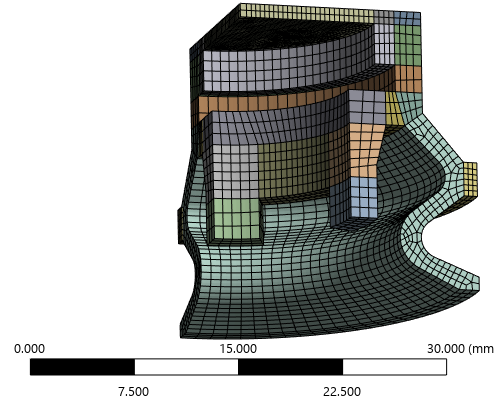
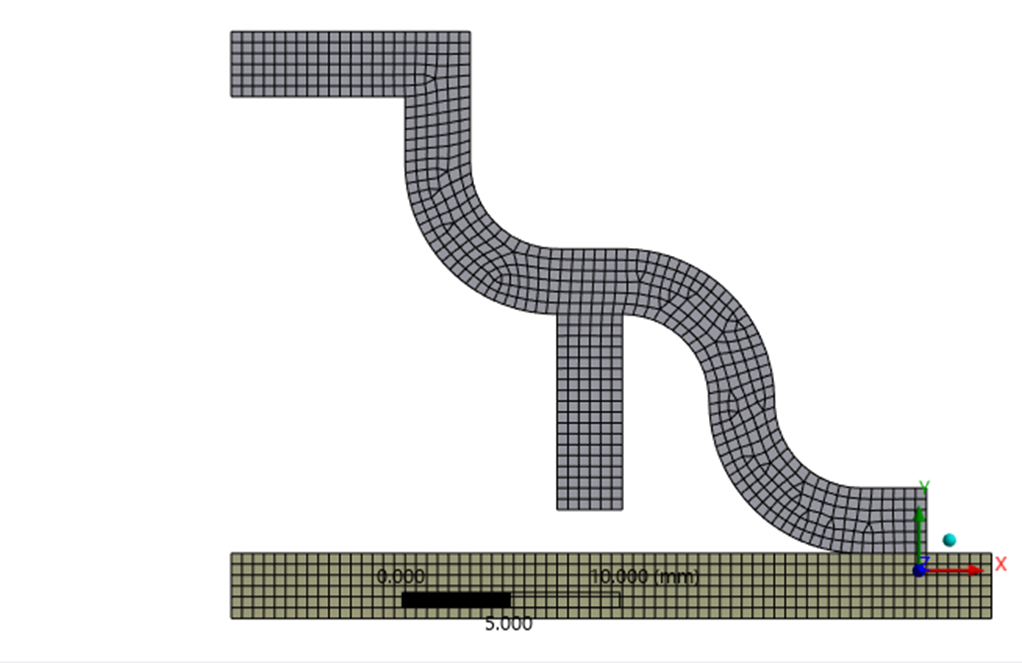
Here is the undeformed mesh
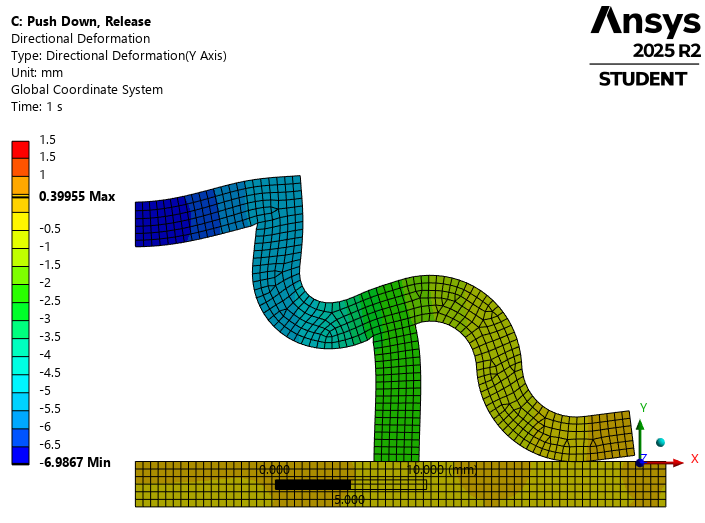
Here is the deformation at step 1 with the negative surface pressure applied.
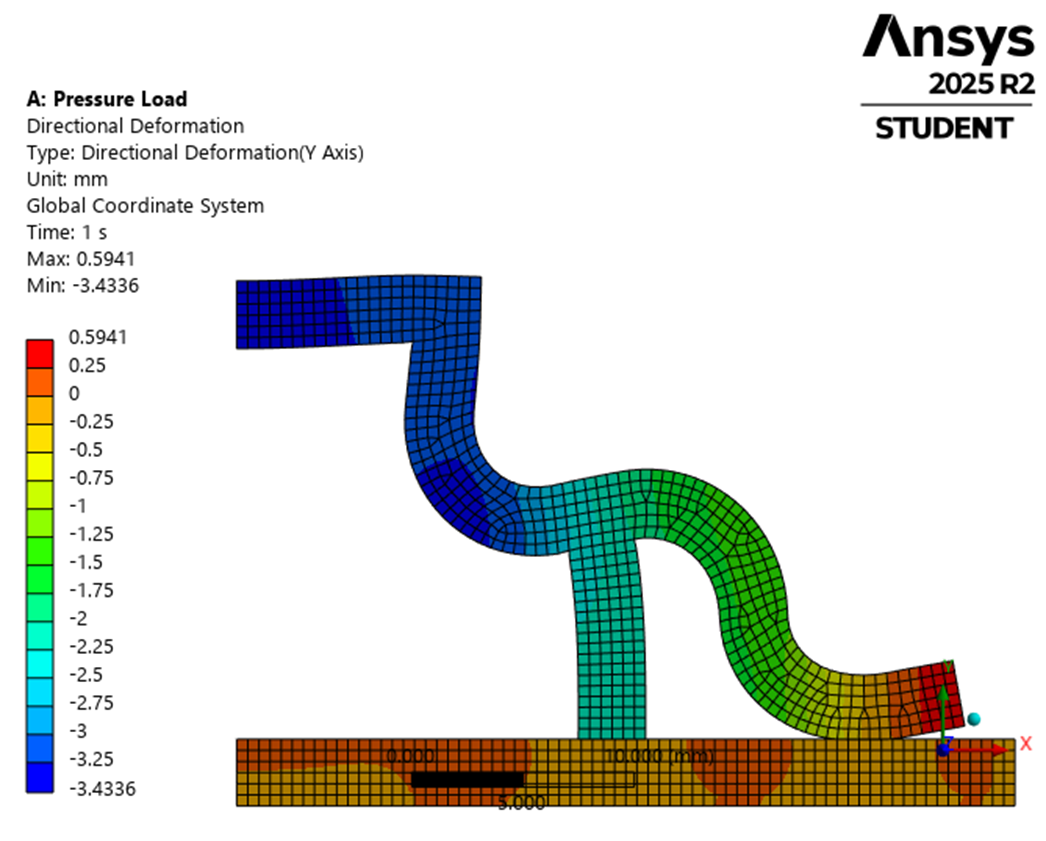
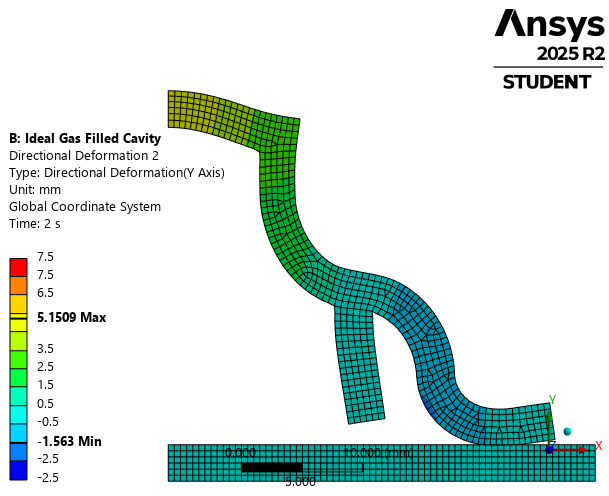
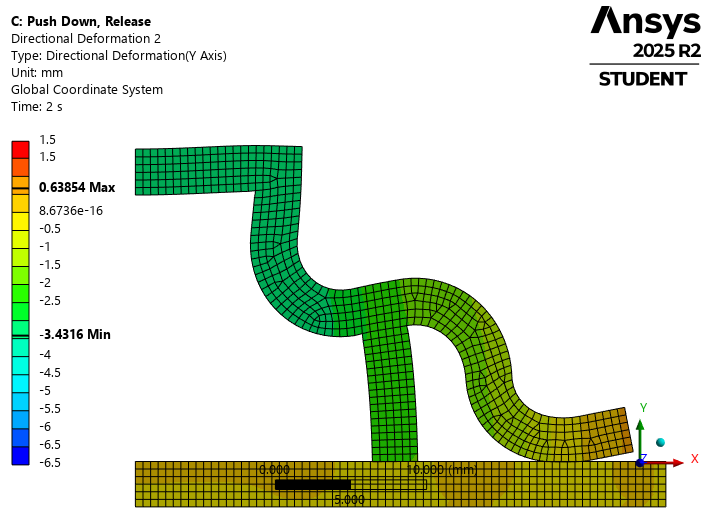
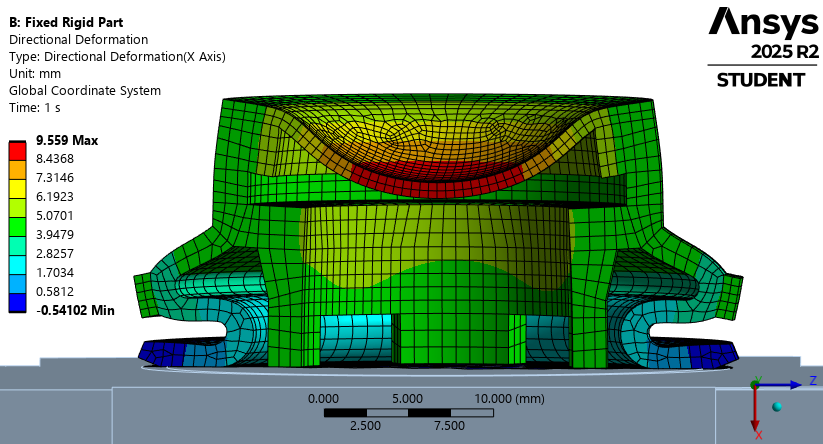
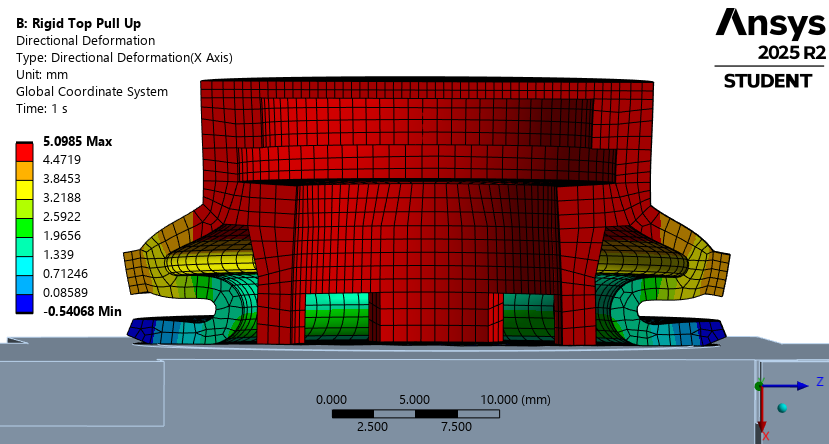
Here is the step 2 deformation with the lift force applied.
The second model has HSFLD241 fluid elements on the interior of the cavity formed by the cup and the base and uses the identical mesh, materials and loads.
The deformation at step 1 is identical.
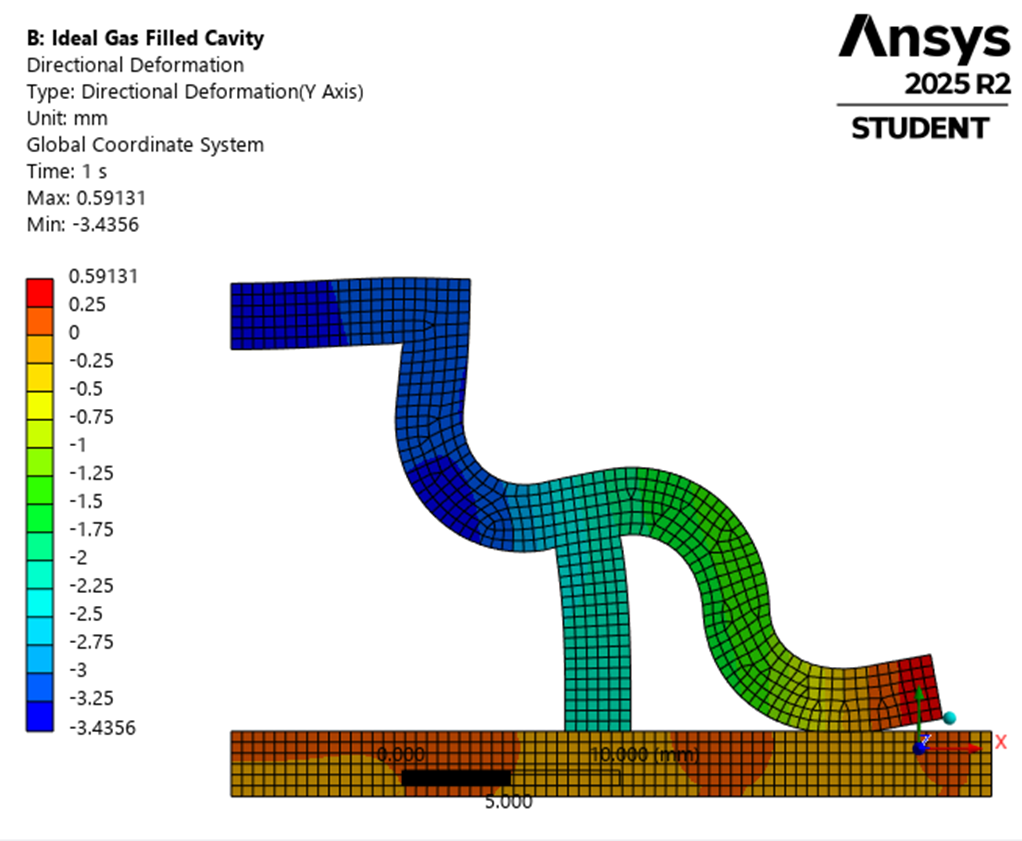
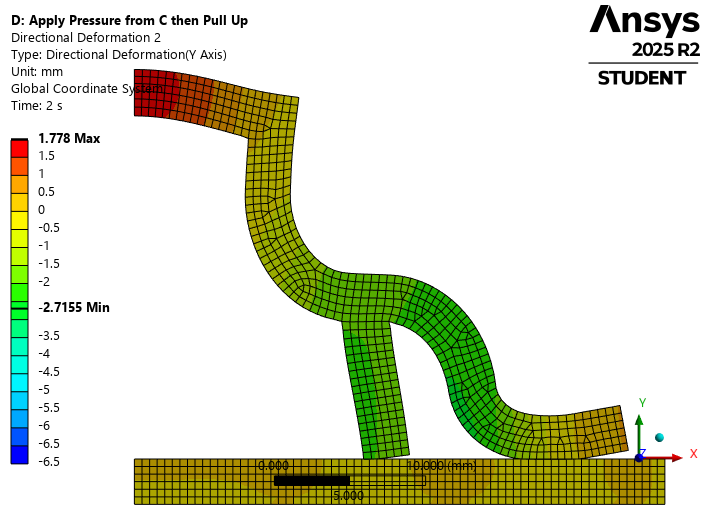
The deformation at the end of step 2 when the force lifts the top of the cup is very different in this model than the first model.
The dramatically different deformed shape between the second and first models when the top of the suction cup is lifted is because the air pressure in the cavity changes in this model! The HSFLD elements couple the pressure in the cavity with the deformed shape of the cavity walls. In the first model, there is no coupling between the deformation and the pressure. At the end of step 1, the vacuum pressure in the cavity for both models is -2.1E-2 MPa. At the end of step 2 in the surface pressure model, the pressure didn’t change, but that does not correctly model the physics of the problem. In reality, because there is a fixed mass of air under the cup at the end of step 1, trying to lift the top creates a higher vacuum pressure. The air pressure at the end of step 2 is -3.73E-2 MPa in the model with the HSFLD elements compared with -2.1E-2 MPa in the surface pressure model.