Hello all,
I recently get interrested in SRS (Shock response spectrum). The theory I understood here is to idealize the system as a 1D mass/spring/damped system.
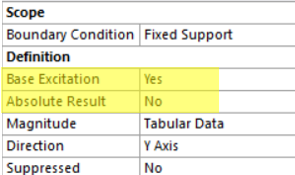
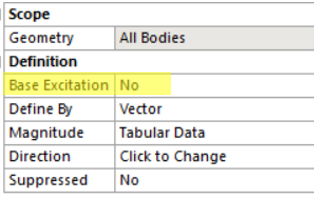
I tried to recreate a simple system with a bushing and a point mass ( I fixed the stiffness of the bushing, I am changing the mass in order to change de natural frequency, Damping numerical=0.005)

Shock impulse is an Half sine curve (Amplitude 3g, duration 30ms)
Boundary condition, the system is in 1D( All displacement blocked but the vertical direction)
Transient simulation data: Duration 0.5s, time step 0.001s, numerical damping (default=0.005)
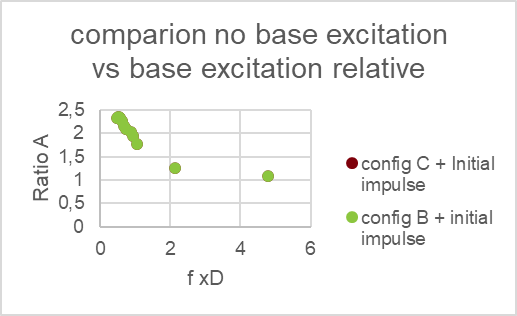
Here are the results given :

I found in the litterature the following curve that I should have:

My problem is that I don't have at all the same result, the higher is the natural frequency the lower is the response going to an asymptote close to 0 instead of 1.Do you know what I am missing here?
My guess is that it is link to the numerical damping effect:

I think I should open a new dicussion about this following topic but I think it is somehow linked.We usualy perform a half sine pulse to a complexe system. In theory the severity of a shock is the velocity change (Energy in the system= 1/2mv^2).Meaning that a 3g 30ms should be equivalent to a 1.5g 60ms shock, but if I compare the maximum stress of the 2 simulations I dont have at all the same result . Any idea why? ( for me it is driven directly from the amplitude of the shock acceleration, in other hand I understand that the severity of a shock is driven from the velocity)
Thanks for your help :)