https://drive.google.com/file/d/1c8knD9l-4qEDQ7dBtIqVcL0vJPYZh1JH/view?usp=drive_link
Thank you for the reply, Please find attached model for your refernce.
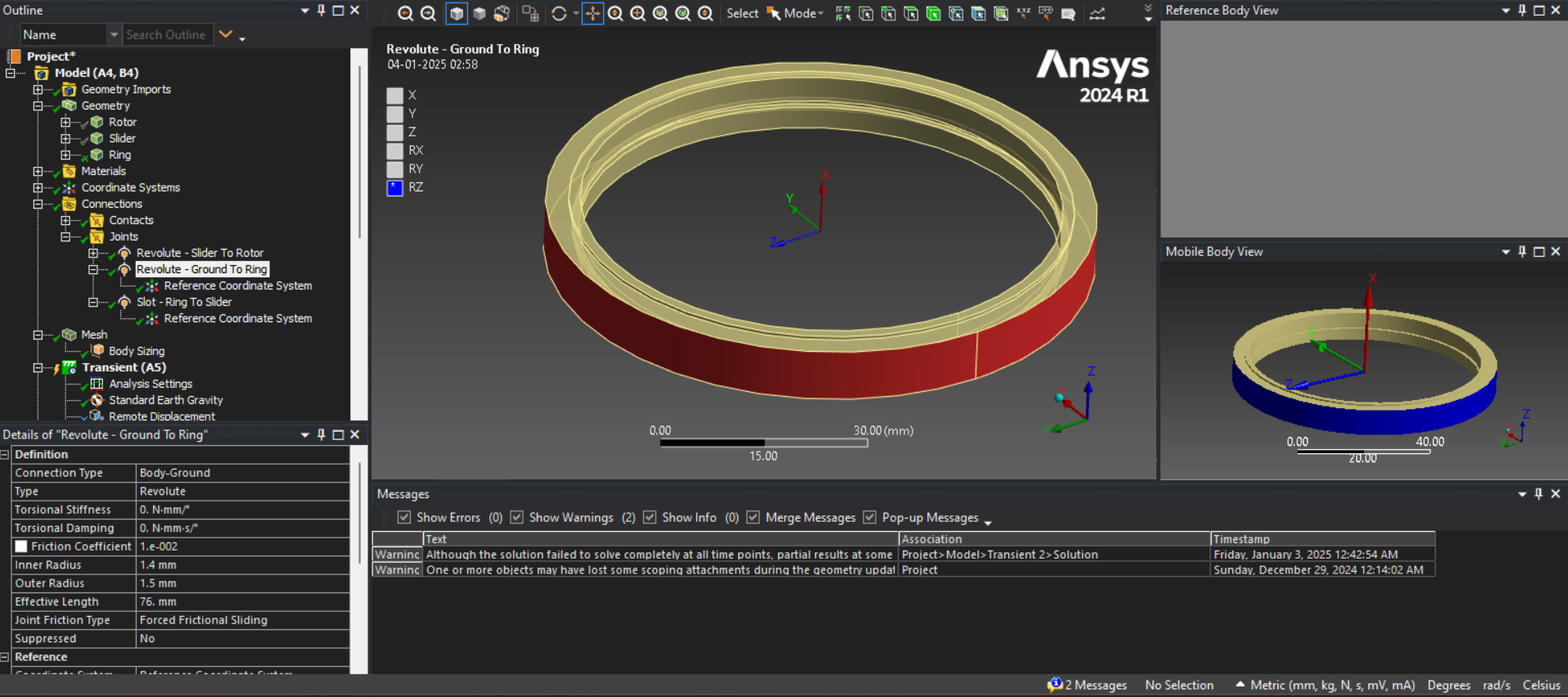
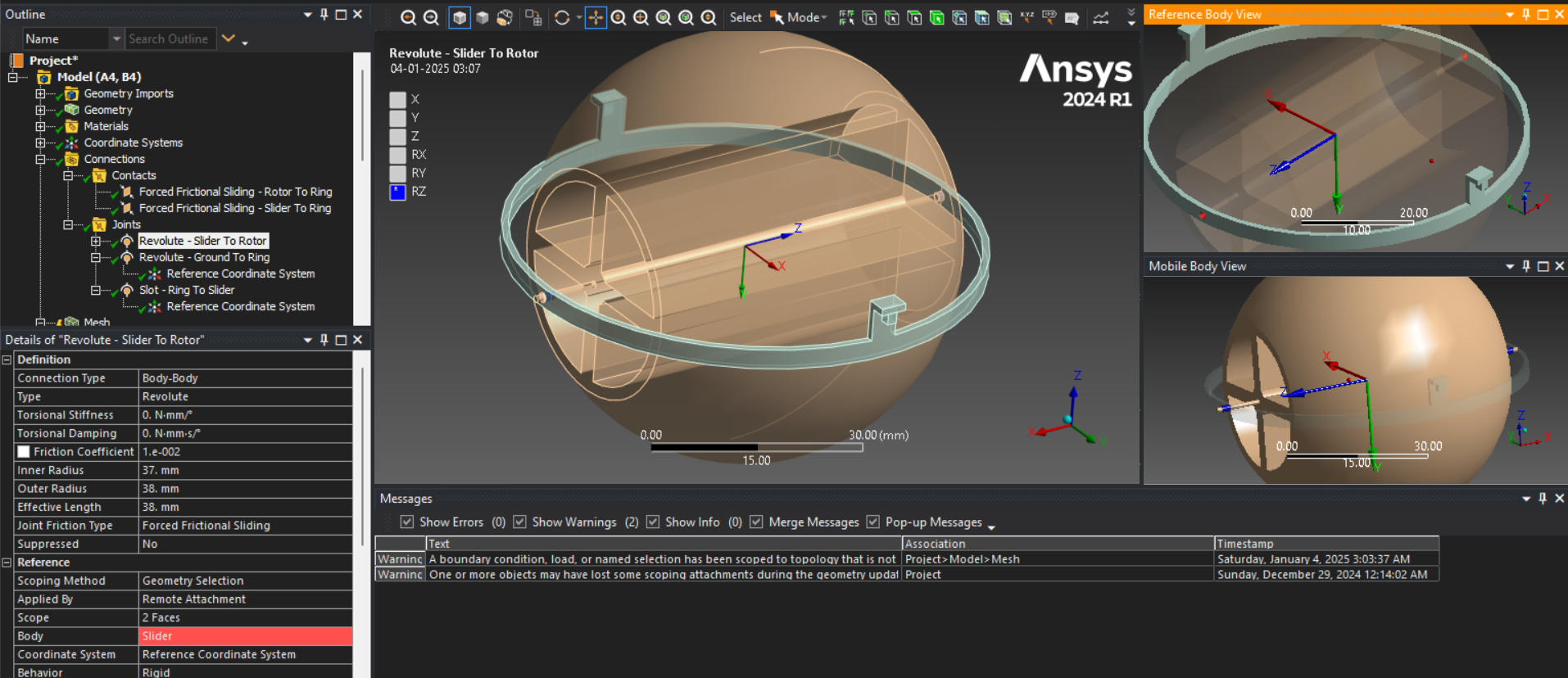
I have checked the redundancy analysis and it is fine, all remining 6 degerees of freedoms can be solved by the contacts.
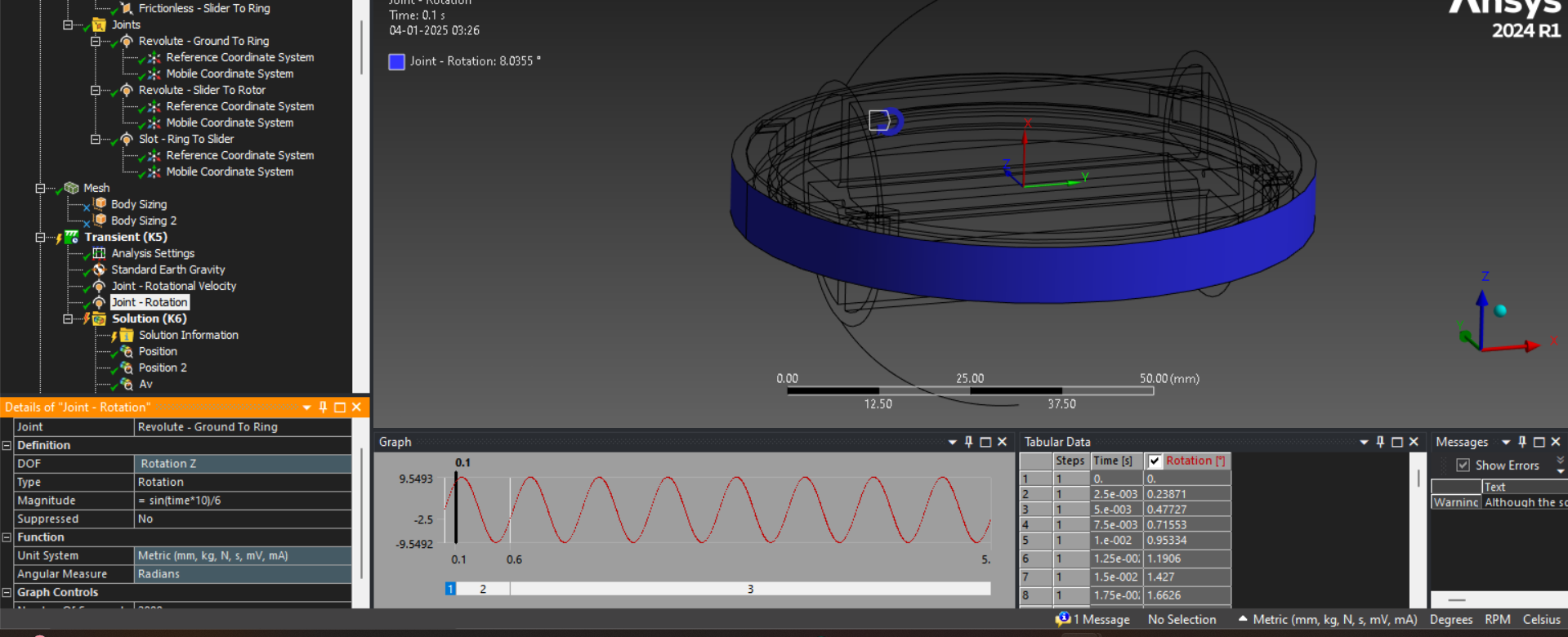
program controlled time stepping is giving accurate results even if it is terminating.
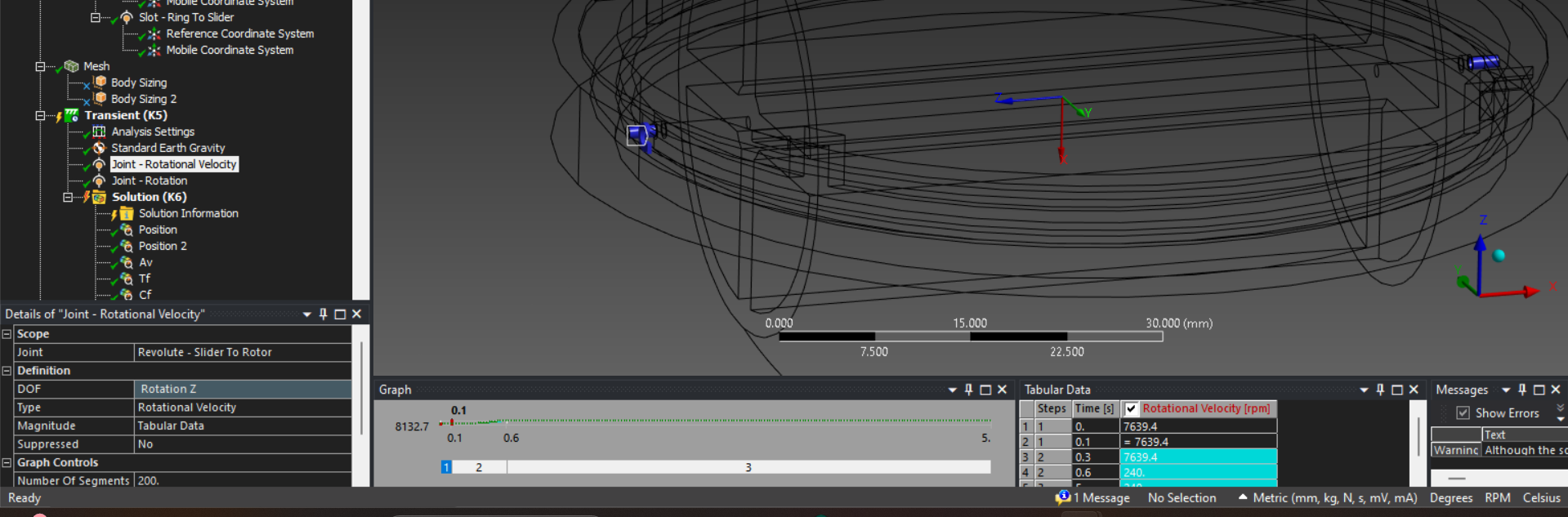
If i use The MJ Time stepping the contact position is not correct. And i need to run the analysis for atleast 10 seconds. For this computational time will be huge with a maximum time time step of 5e-5.
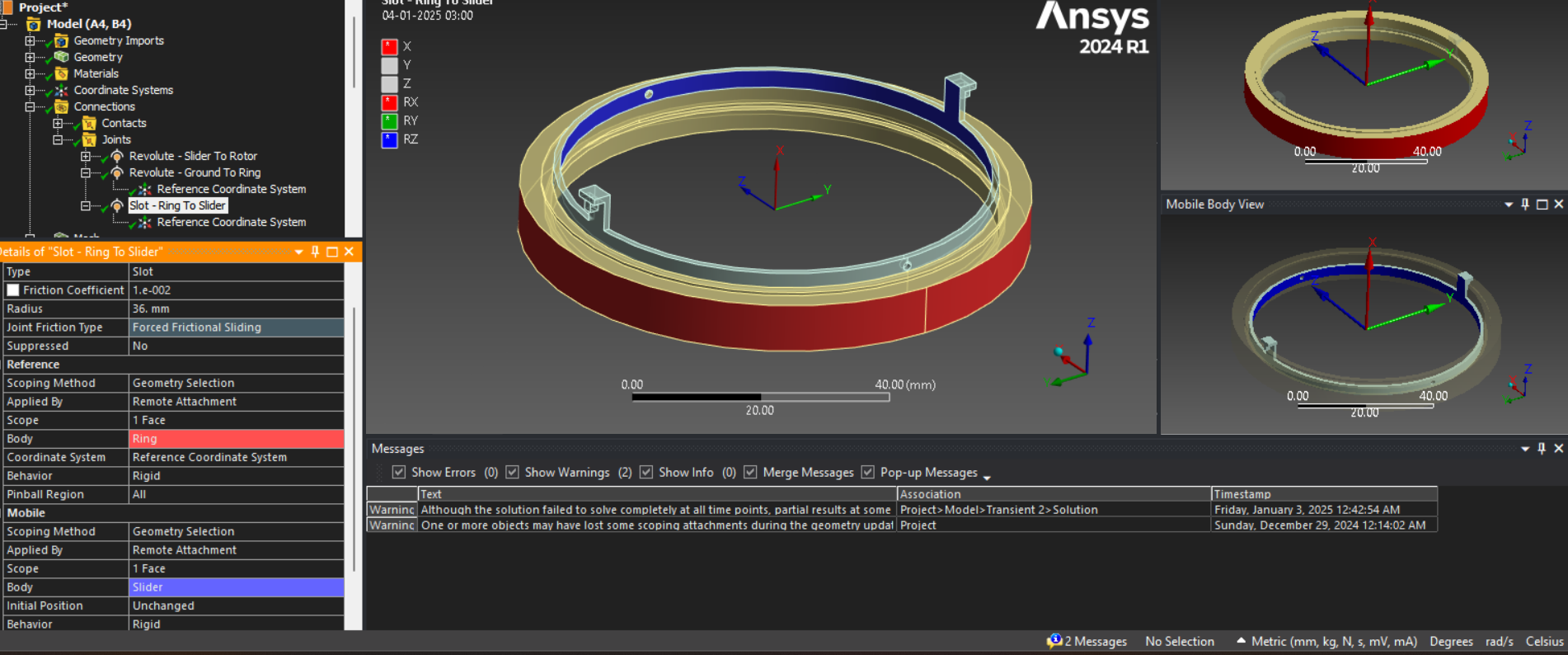
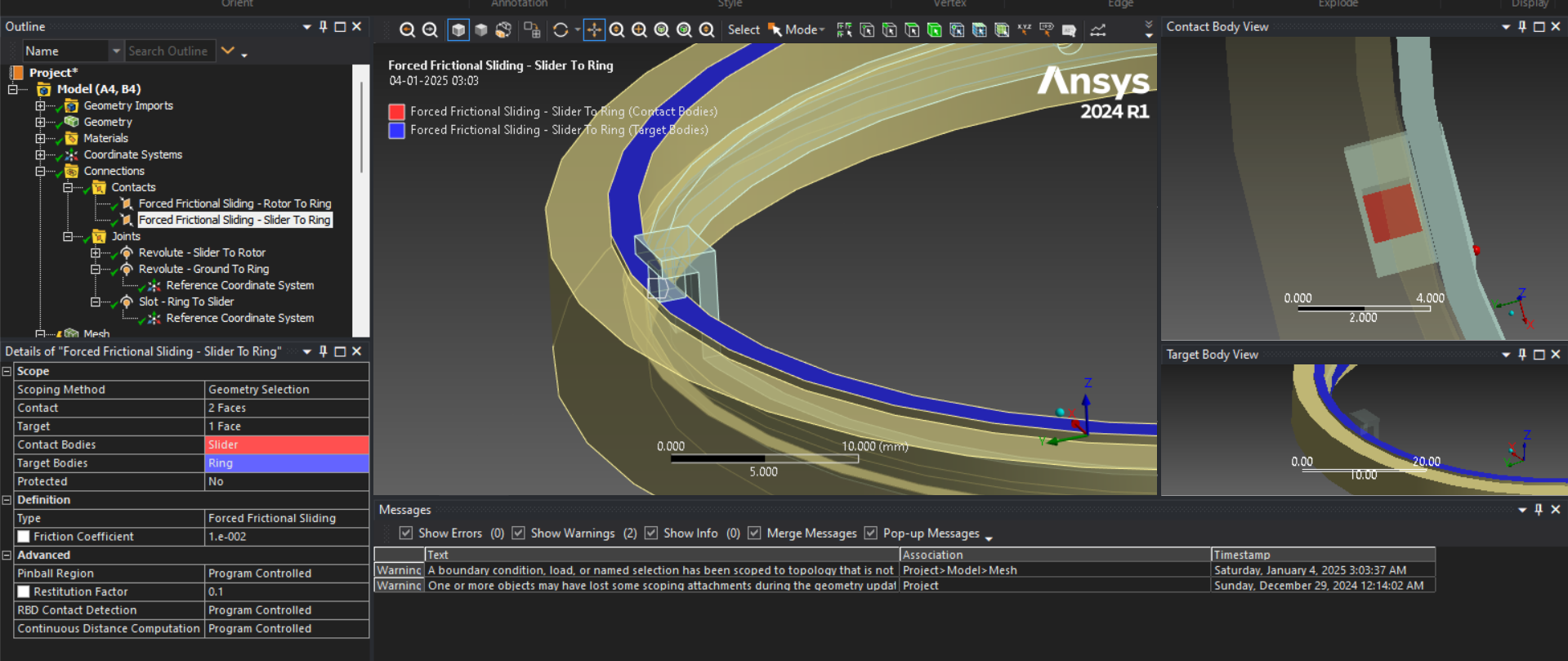
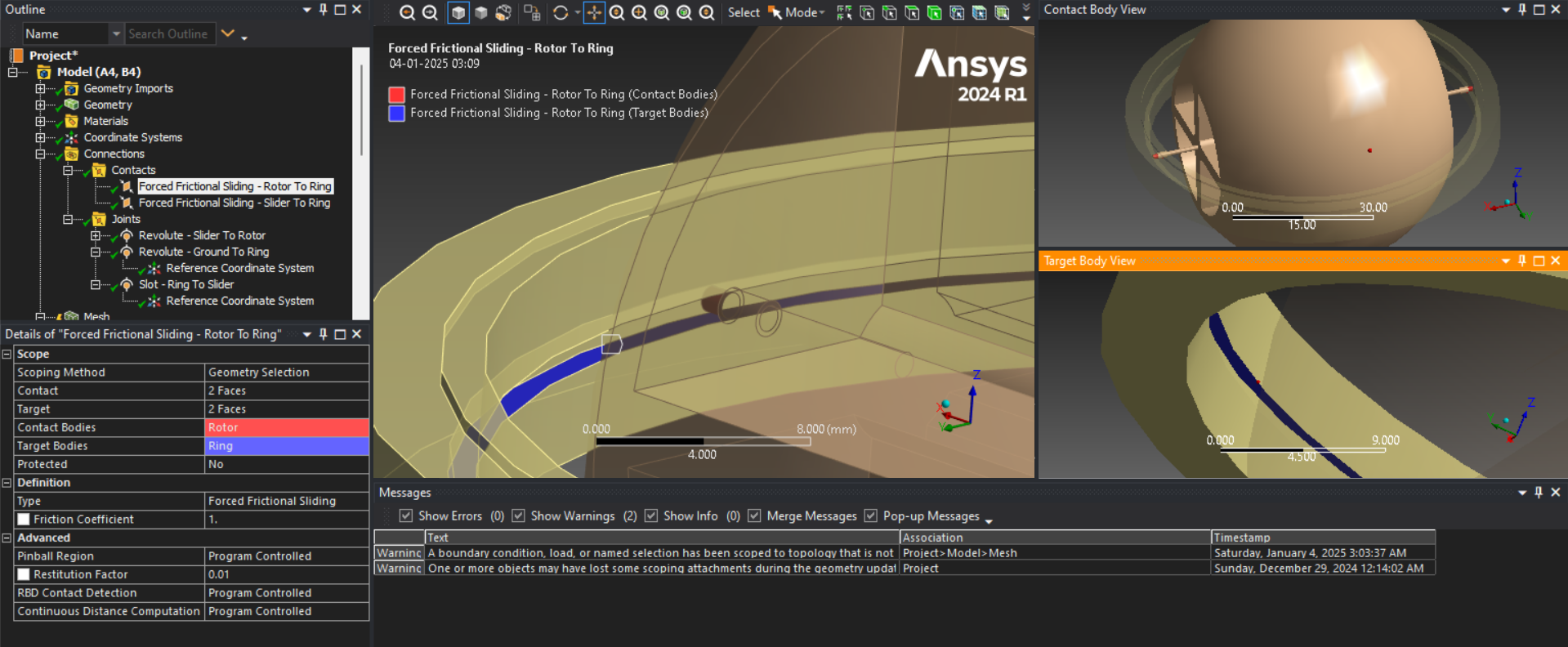
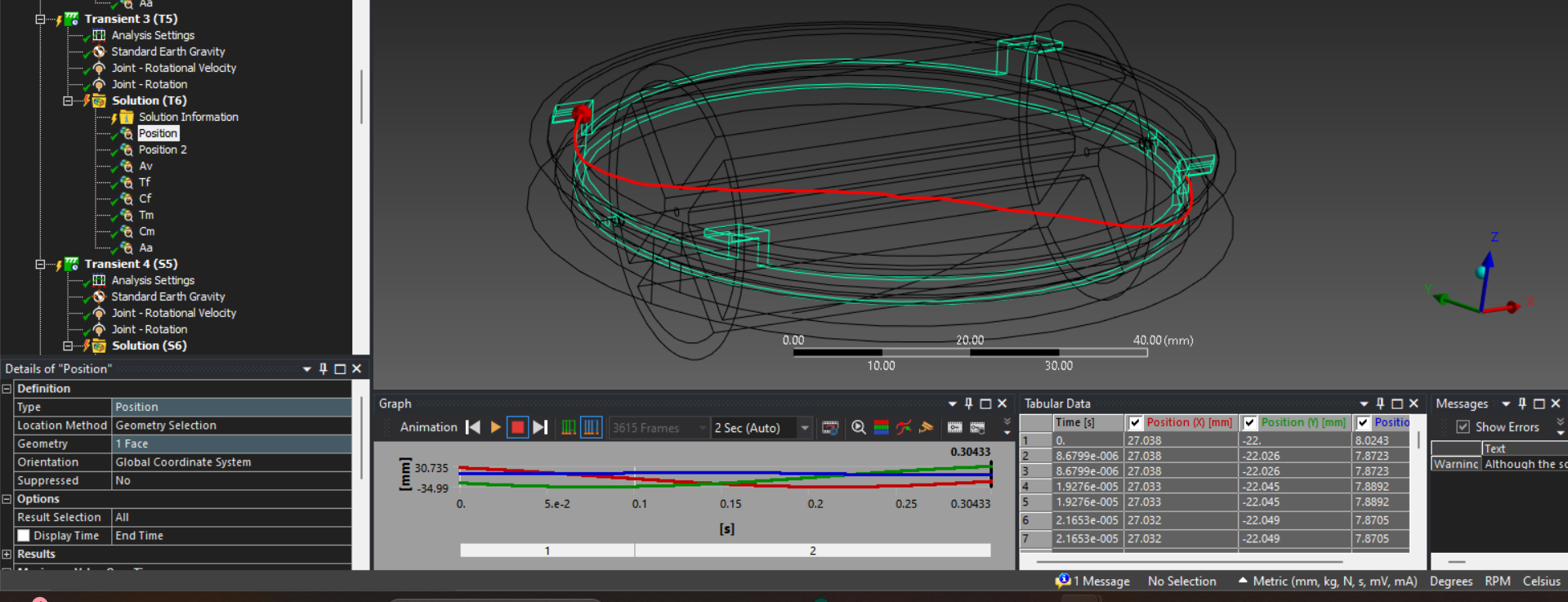
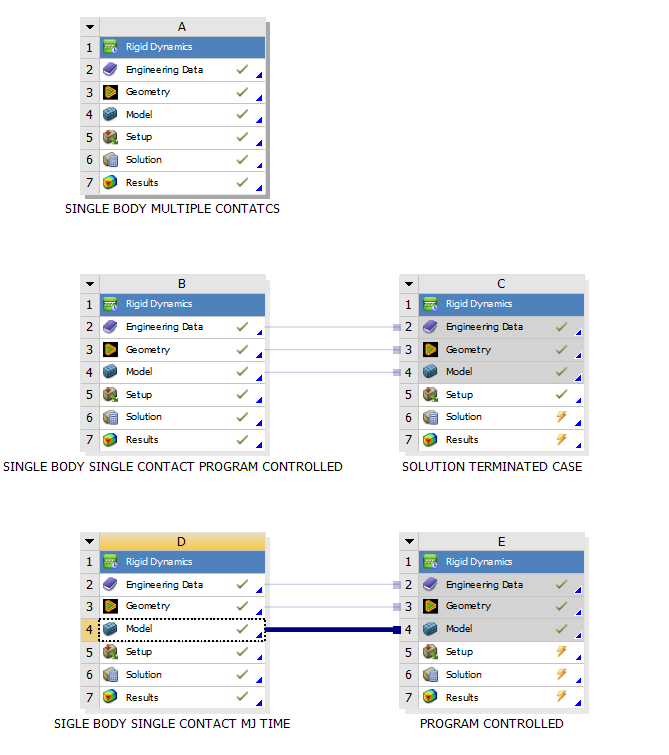
In the attached files there are three models first one is Single body multiple contatcs so its contact output is wrong.
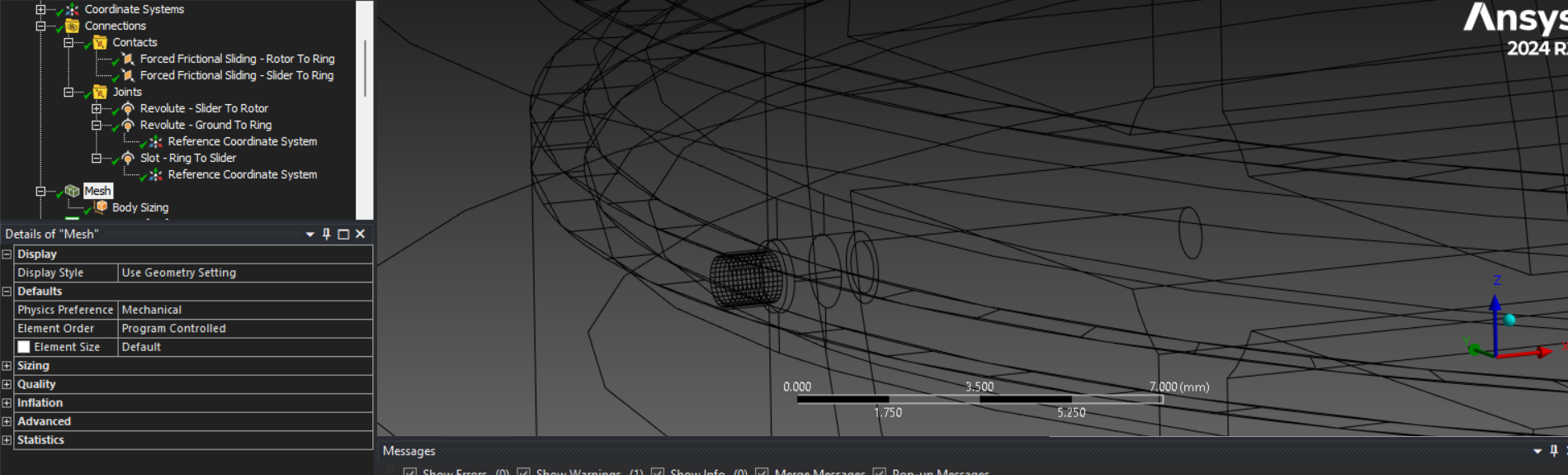
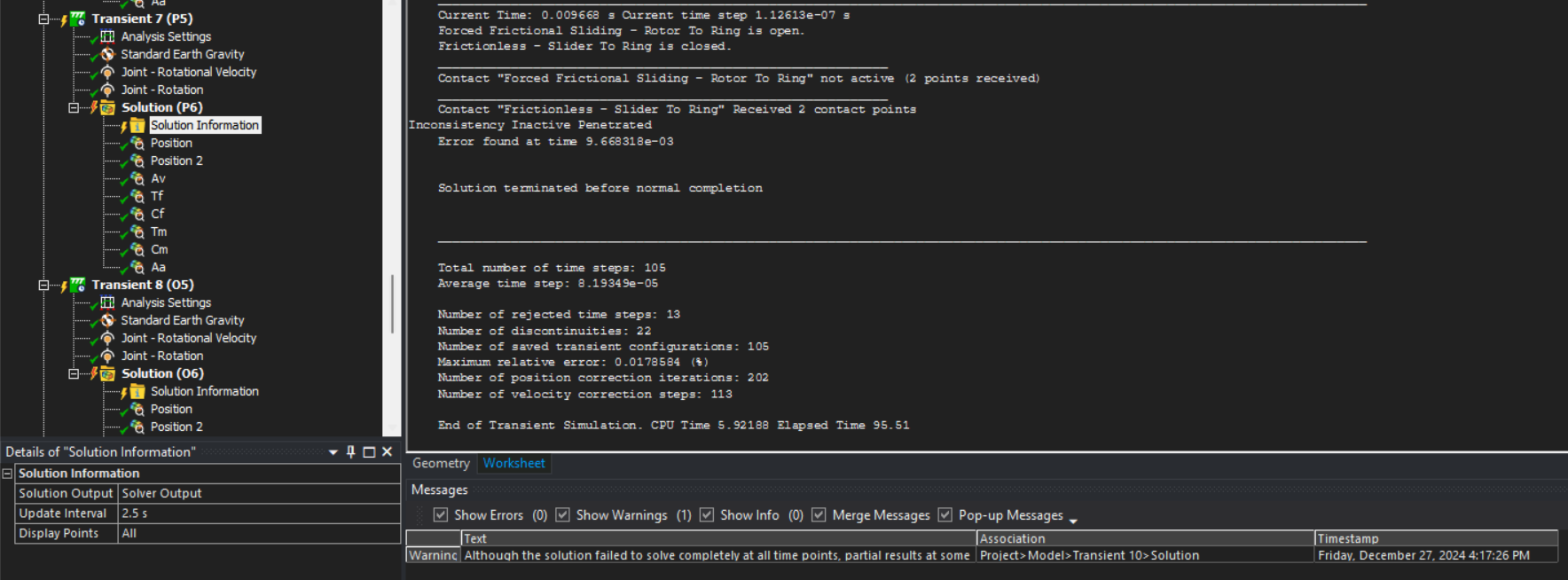
In second model i split the bodies to define contacts for different areas and it is working fine for 0.2 seconds time but after that it is terminating with errors.
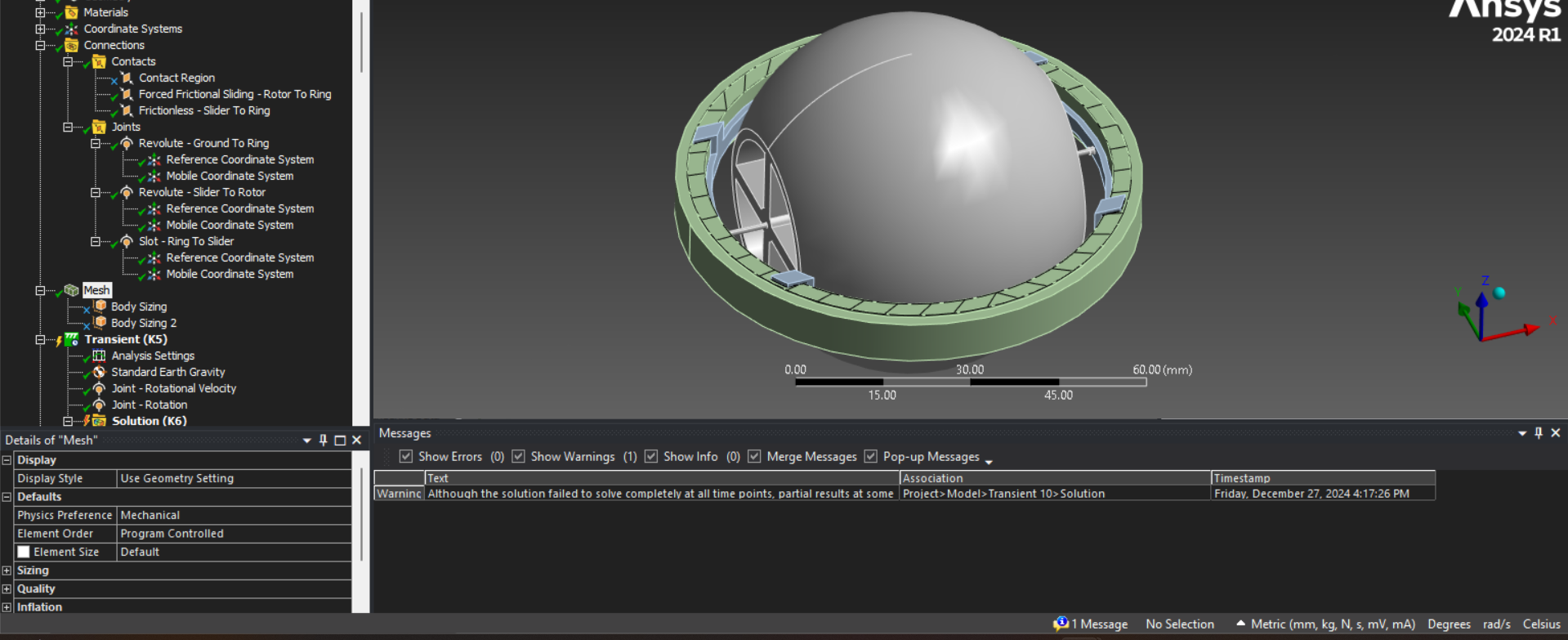
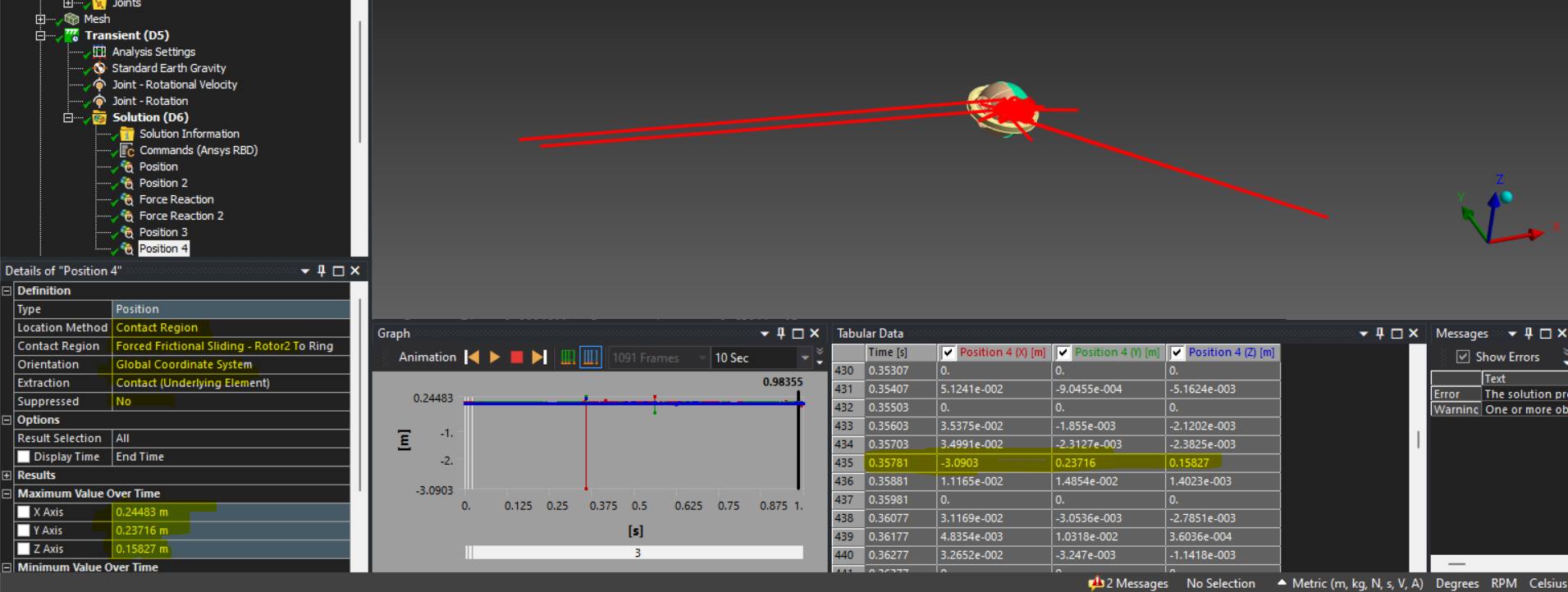
The third model is with MJ time stepping as you suggested with maximum time step but the contact results were wrong and also terminating after some time.
Thank you.