Hello Shasa,
I like that you are creating simple models to incrementally get new pieces working, rather that trying to get a complicated model working all at once.
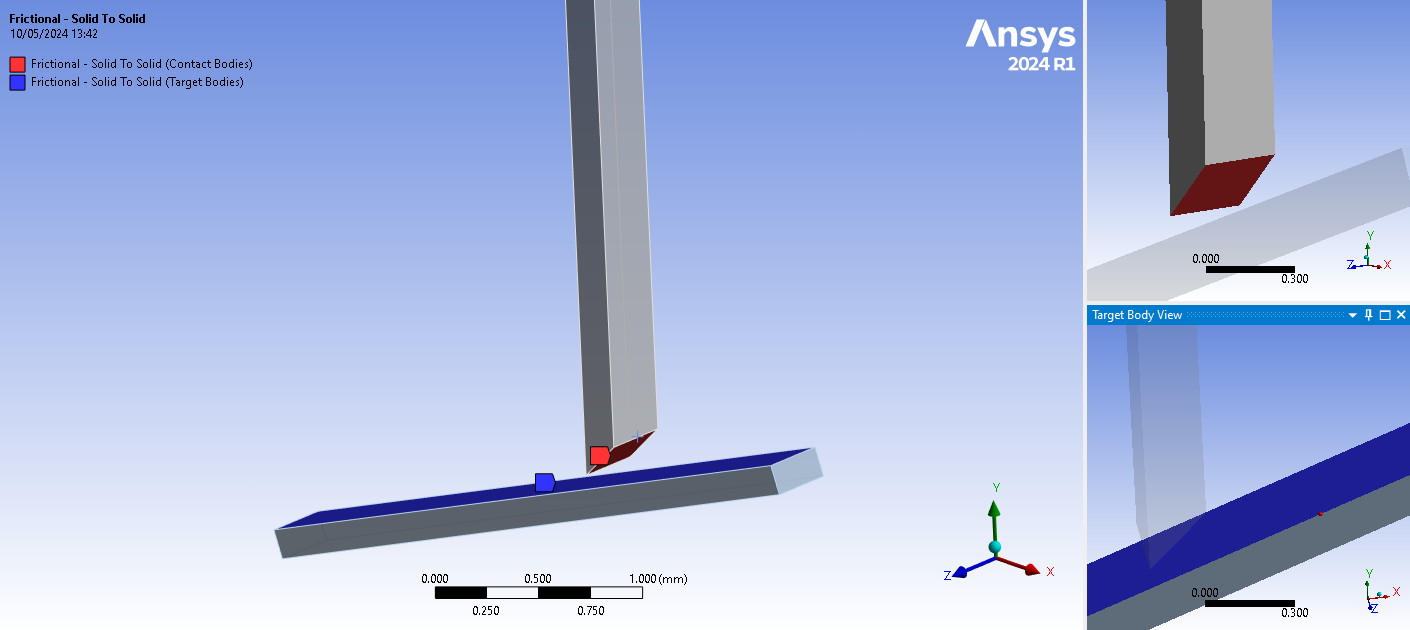
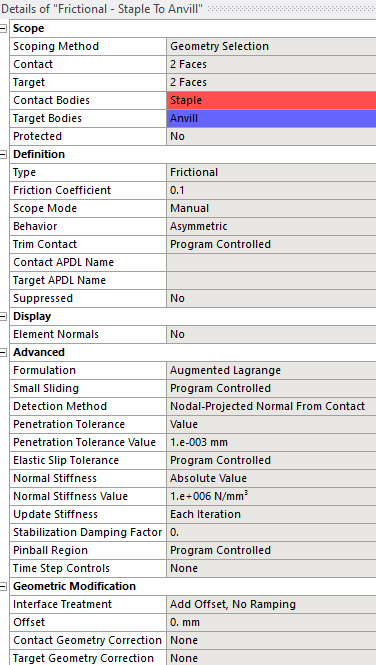
I see that you have inserted a Contact Tool under the Connections folder, which is always recommended for any nonlinear contact use. Please Generate the Initial Contact Status and show the table. Is the contact Near Open or Far Open? If it is Far Open, edit the Contact and change the Pinball Region so you can type in a Pinball Radius that is larger than the gap between the two surfaces.
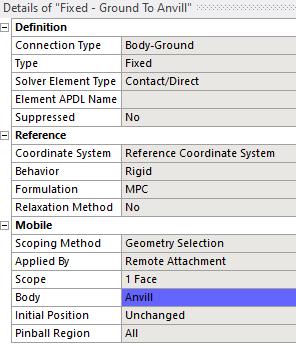
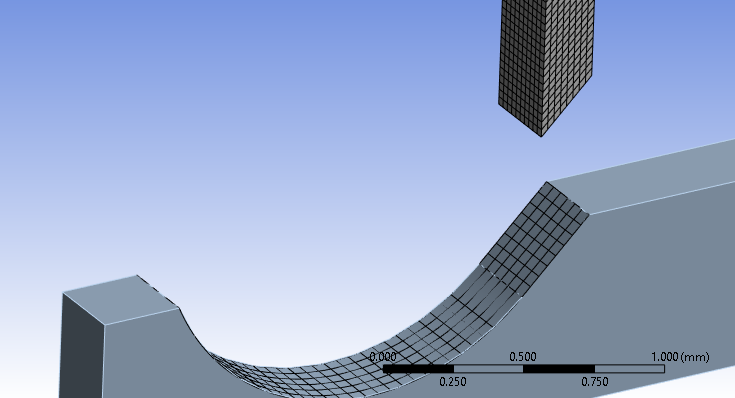
The MPC warning might also be an issue. I see you have a Fixed Joint and I assume that is to hold the rigid body in place. Which side of the tilted block was selected? If it was the same side as the contact, change the Fixed Joint to use the side opposite to the contact surface.
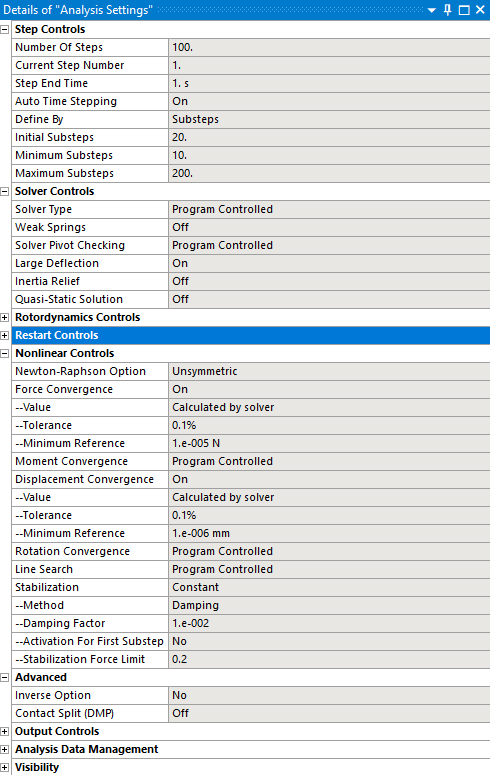
While you can get the Transient Structural model to run, it will take less a bit less time to solve if you change the analysis type to Static Structural. You can do that in Workbench by right clicking on the top of the block. The bending of a staple does not generate high inertia forces because the accelerations are low which is why Transient is unnecessary. If you change to Static Structural, you may have to manually turn on Large Deformation under the Analysis Settings because the default is off under Static Structural, but the default is on under Transient Structural.
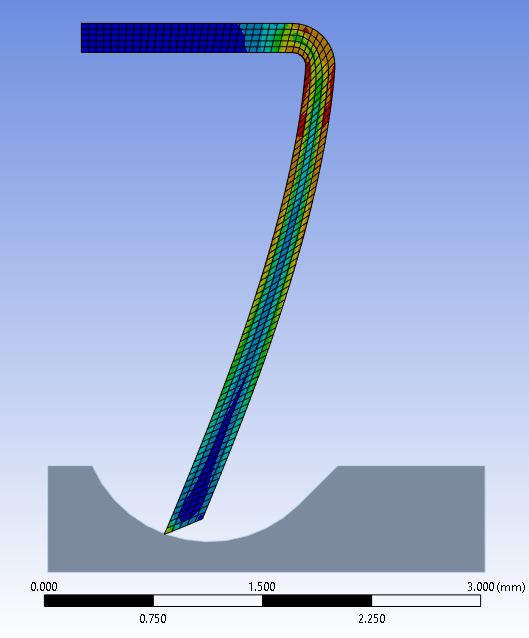
Finally, under Analysis Settings, make sure to turn on Auto Time Stepping and use a lot of substeps to gradually bend the staple leg. In Transient, the substeps are defined using time, so you define a small value for the Maximum Substep time, and that value is small relative to the End Time for the step. In Static Structural, the End Time defaults to 1 s and the substeps are by number so you define a large number for the Minimum Substeps to use a lot of substeps to gradually bend the staple leg.
Try these and see if you get what you want. If it is still not working, there are some other things to try.
Regards,
Peter