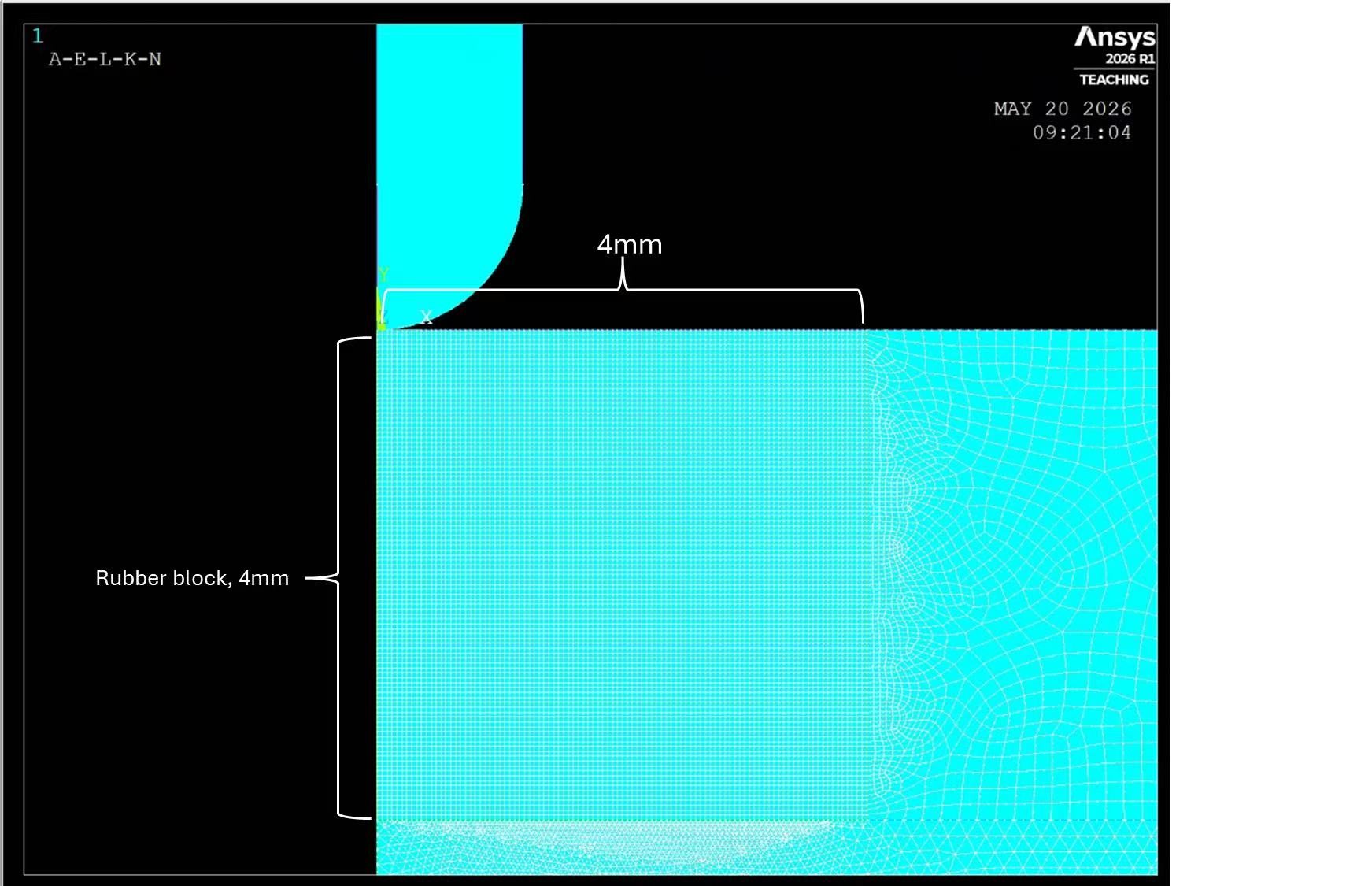
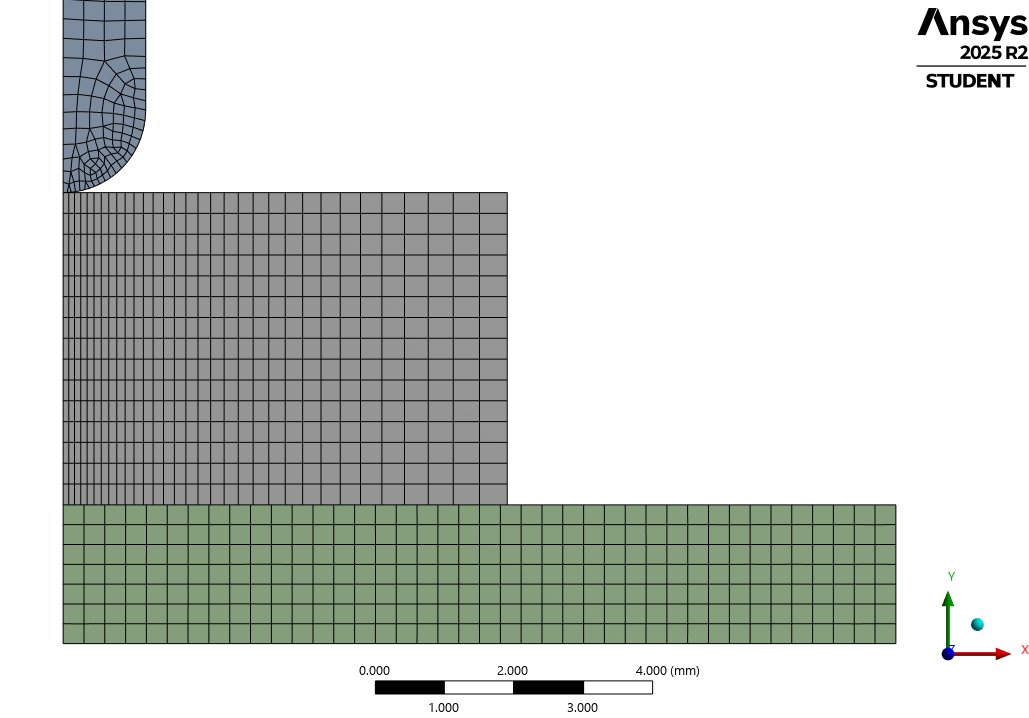
Make a linear element mesh that is biased to the Y axis horizontally, but uniform vertically. You want tall, skinny elements on the Y-axis as shown below. Make the rubber disk from a single face, there is no need to split the rubber into multiple faces. There is no need for Nonlinear Adaptive Meshing. Under the rubber disk, add a base part so the rubber can lift off.
Under Engineering Data, in the Explicit Materials category, add the material called Rubber1 that uses an Ogden Hyperelastic Material Model and assign it to the rubber disk.
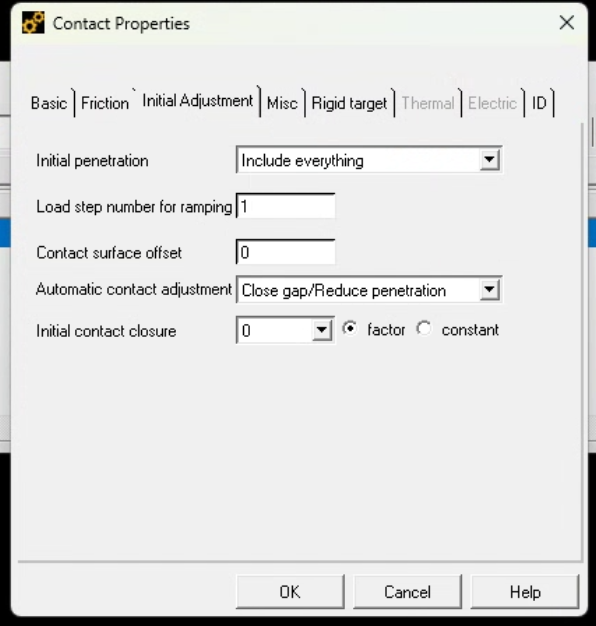
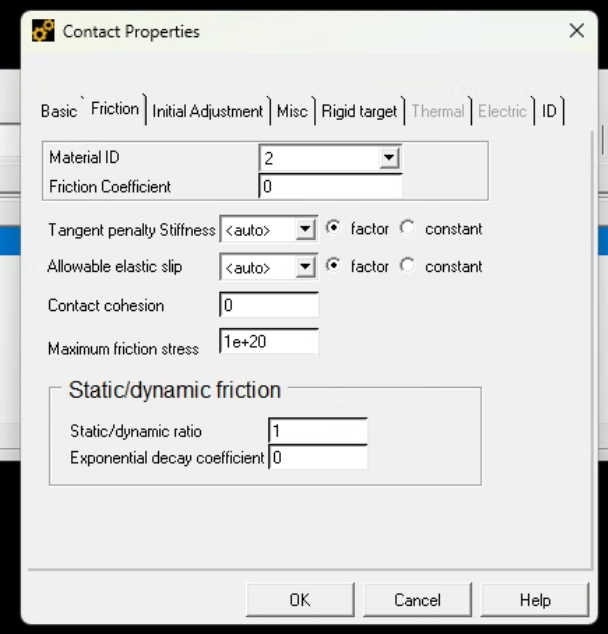
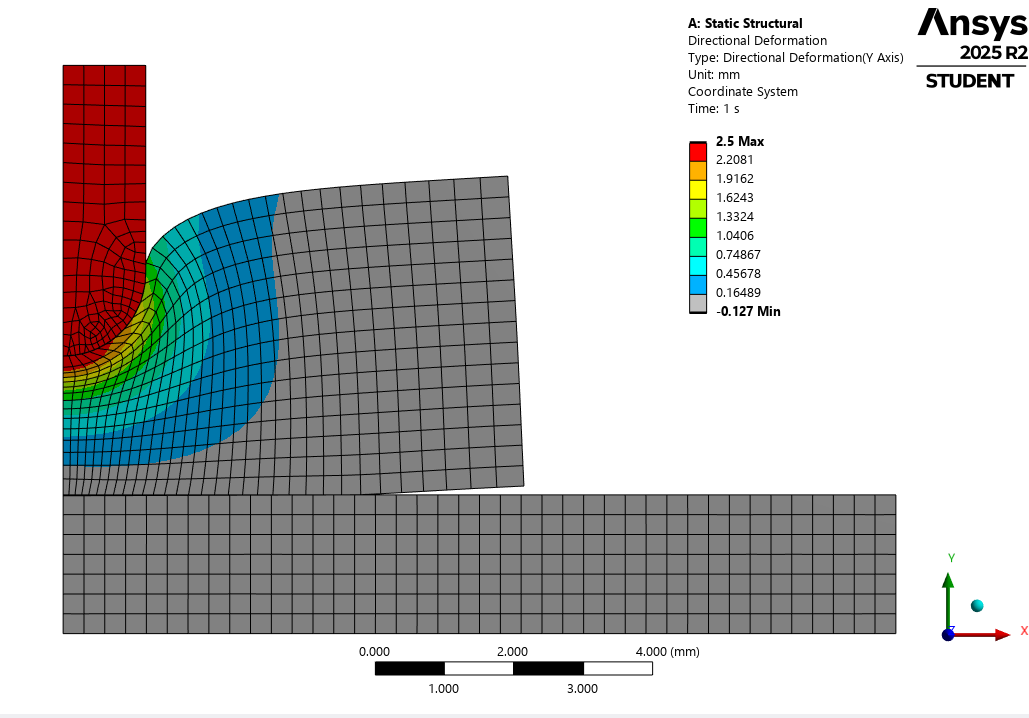
I set Frictional contact between the indenter edges and the top edge of the rubber to have a Coefficient of Friction of 0.2 and did the same between the top of the base plate and the bottom edge of the rubber. Set Auto Time Stepping to On and use 50 Initial and Minimum Substeps, with 500 Maximum Substeps. Turn On Large Deflection.
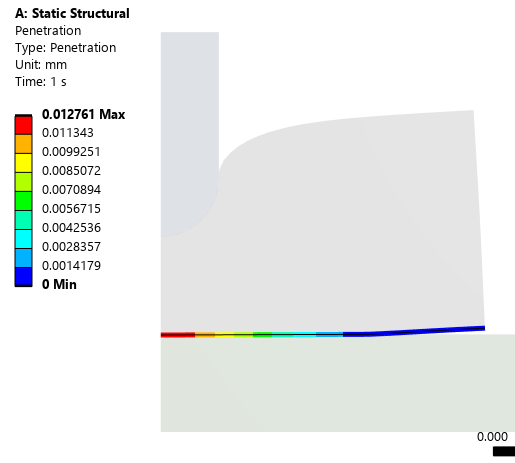
With default settings for the contact, the Penetration is less than 0.005 mm at the indenter.
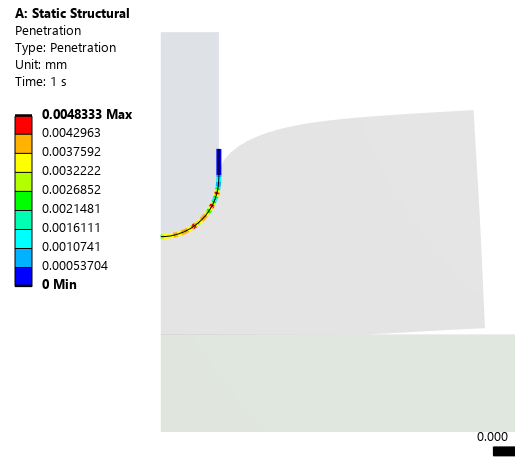
However, the penetration is larger on the base plate.
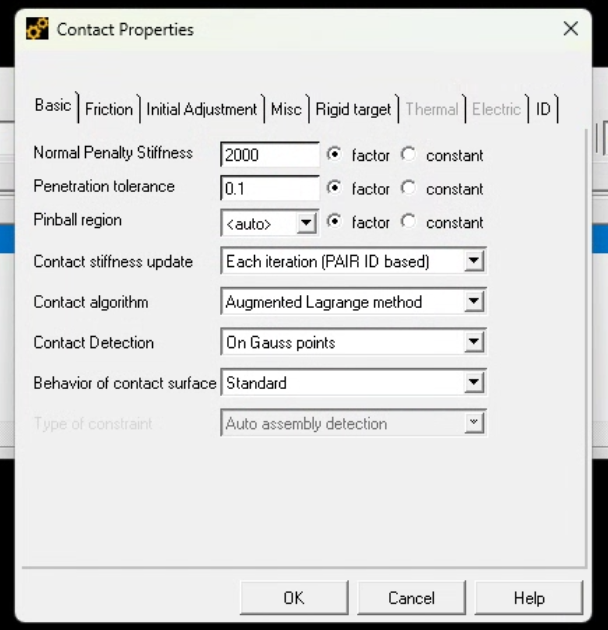
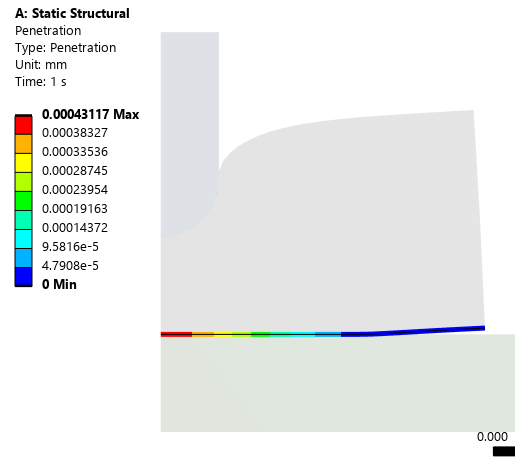
By setting the Penetration tolerance to 0.001 mm, the new solution shows a much smaller penetration.
Good luck!