Hi Rashiga,
I would build a Static Structural model that has two (or more) steps. In the first step, the designed-in interference in the frictional contact is resolved to create an initial contact pressure for a stationary shaft, with the stretch and compression of the layers at each diameter computed at the end of step 1.
In the second step, the rotational velocity and rotational acceleration is applied. Each material layer has its own density and Young's Modulus that makes it stretch to come to equilibrium at the specified rotational velocity.
The contact pressure can be examined at Step 2 to determine if an adequate amount of pressure is present to prevent slippage, given the known coefficients of friction between the various layers and the rotational acceleration. You haven't specified the rotational acceleration. It is only under rotational acceleration that there is a torque on the layers that would induce slipping.
If you have a rotational velocity and acceleration profile, you could make several steps along that profile and have the acceleration included along with the velocity. The maximum rotational acceleration would be at the start of a spin-up or slow-down profile. At spin-up, the rotational velocity is lowest, the contact pressure is highest, so the propensity to slip is lowest. On the other hand, putting on the brakes to slow down from maximum velocity is when the contact pressure is lowest, so the propensity to slip is highest.
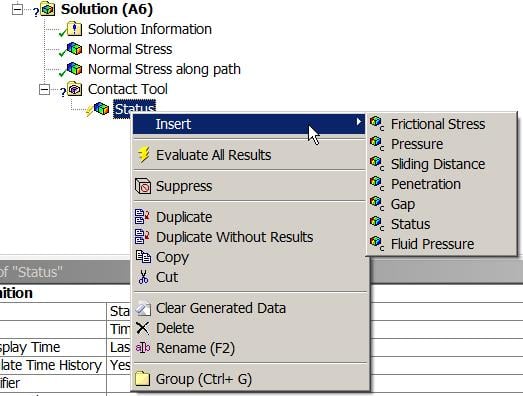
In the contact results, you can see directly the tangential forces in the contact elements and determine the margin to slipping. If it does slip, the solution will fail to converge, which is okay since that is an unacceptable design and you need a higher contact pressure.
Regards, Peter