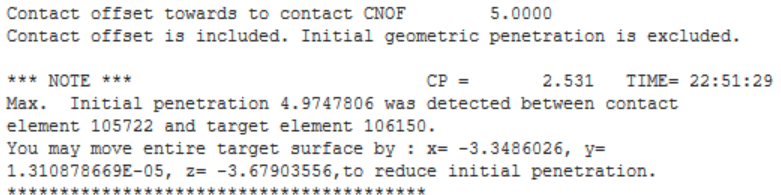
The initial contact status reports the penetration that exists before the solver starts to search for equilibrium of the forces on the node and elements with closed contact contact status. The solver performs iterations, moving nodes around until it converges on equilibrium. Then it writes that converged substep into the result file. During convergence iterations, the penetration is going to be driven down to a very small value by defoming the material on either side of the contact pair. Ideally, there is zero penetration when convergence has been achieved. One contact formulation (Pure Lagrange) delivers zero penetration but the other contact formulations leaves a tiny amount of penetration which can be adjusted by editing the Normal Stiffness of the contact.
From ANSYS Help
For surface-to-surface contact elements, the program offers several different contact algorithms (formulations):
Penalty method (KEYOPT(2) = 1)
Augmented Lagrangian (default) (KEYOPT(2) = 0)
Lagrange multiplier on contact normal and penalty on tangent (KEYOPT(2) = 3)
Pure Lagrange multiplier on contact normal and tangent (KEYOPT(2) = 4)
The penalty method uses a contact spring to establish a relationship between the two contact surfaces. The spring stiffness is called the contact stiffness. This method uses the following real constants: FKN and FKT for all values of KEYOPT(10), plus FTOLN and SLTO if KEYOPT(10) = 0 or 2.
The augmented Lagrangian method (which is the default) is an iterative series of penalty methods. The contact tractions (pressure and frictional stresses) are augmented during equilibrium iterations so that the final penetration is smaller than the allowable tolerance (FTOLN). Compared to the penalty method, the augmented Lagrangian method usually leads to better conditioning and is less sensitive to the magnitude of the contact stiffness. However, in some analyses, the augmented Lagrangian method may require additional iterations, especially if the deformed mesh becomes too distorted.
The pure Lagrange multiplier method enforces zero penetration when contact is closed and "zero slip" when sticking contact occurs. The pure Lagrange multiplier method does not require contact stiffness, FKN and FKT. Instead it requires chattering control parameters, FTOLN and TNOP. This method adds contact traction to the model as additional degrees of freedom and requires additional iterations to stabilize contact conditions. It often increases the computational cost compared to the augmented Lagrangian method.
An alternative algorithm is the Lagrange multiplier method applied on the contact normal and the penalty method (tangential contact stiffness) on the frictional plane. This method enforces zero penetration and allows a small amount of slip for the sticking contact condition. It requires chattering control parameters, FTOLN and TNOP, as well as the maximum allowable elastic slip parameter SLTO.