Hi everyone,
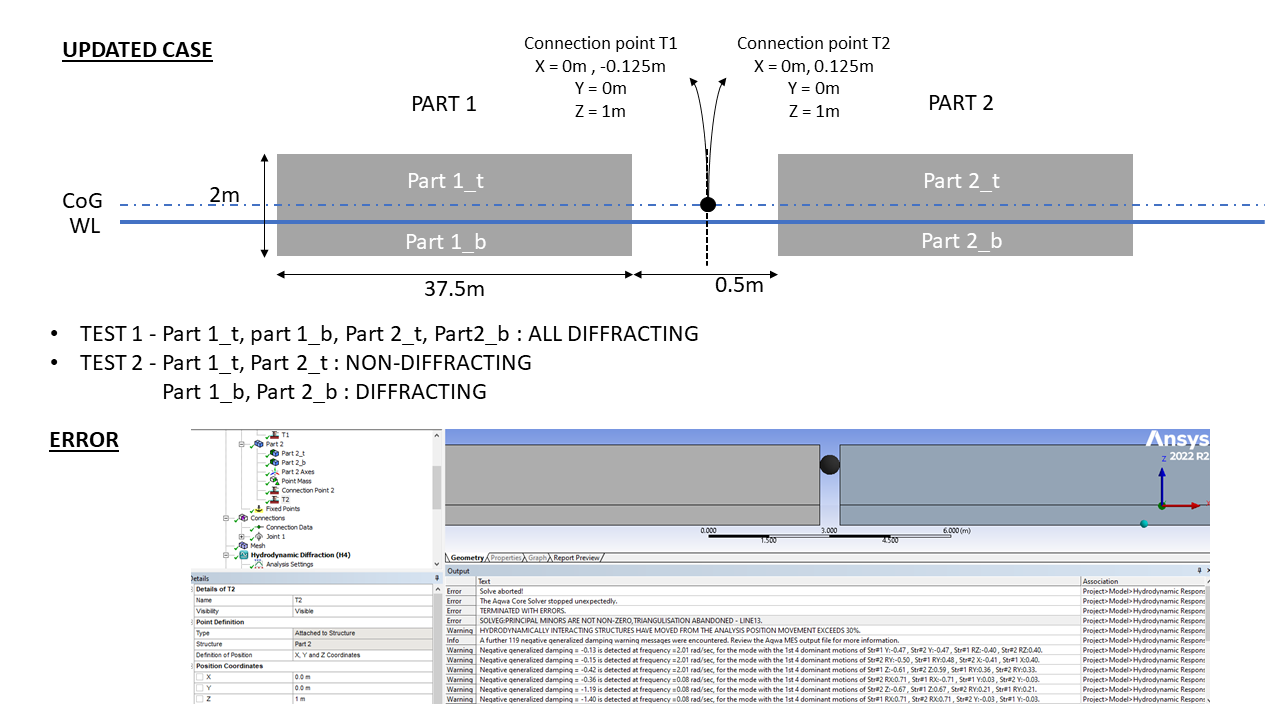
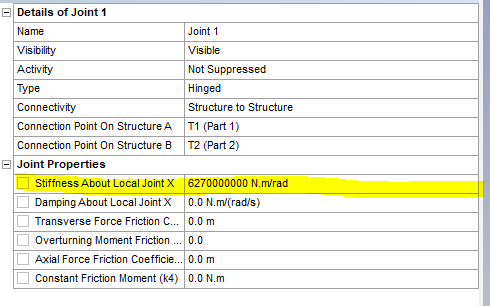
I am trying to simulate the hydrodynamic response of two floating blocks connected to each other as shown in the attached images. Each of the blocks are of dimensions 37.5m (L) x 60m (W) and the gap between the two blocks is 0.5m. I have used the hinged joint to make the connection between the two blocks. As of now, I have not specified any stiffness for the joints for a simple analysis. I am trying to do both frequency and time domain analysis. The frequency domain analysis using hydrodynamic diffration did not show any errors where as the in the hydrodynamic response analysis, there were a few warnings along with the error - " HYDRODYNAMICALLY INTERACTING STRUCTURES HAVE MOVED TOO FAR FROM ANALYSIS POSITION MOVEMENT EXCEEDS 75% STOPPED AT TIME = 0.00."
I have tried the following to elimate this error:
a. I have checked the selection of the blocks after the joint has been established as it seems to be in order as per the image I have attached.
b. Also, I have set the water size of X = 3000m and Y = 840m. So I am assuming that it is sufficiently long for a 10s simulation for a regular wave whose wave height is 0.1m and the wave frequency is 0.71826 rad/sec.
c. I also tried to added deactivated freedoms for both the blocsk in X, Y, Ry and Rz directions as I am interested in the heave (z) and pitch (Rx) response only.
d. I have also refined my mesh with an element size of 0.5m, connection tolerance of 0.01m as shown in the attached image.
Despite all these tries, I have not been to resolve this error. It would really really helpful if someone can help me out with this!
Thank you!