I am working on modeling a Split Hopper Barge in ANSYS for my thesis project and am encountering several issues. Below is a detailed description of my setup and the problems I am facing:
Model Setup:
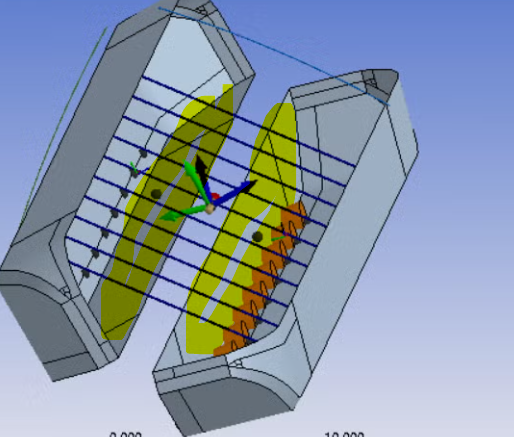
- I have created two joints on the deck: one hinge joint and one universal joint. This setup was intended to avoid redundancy. The gap between the two hulls is 180 mm, as shown in the attached diagram.
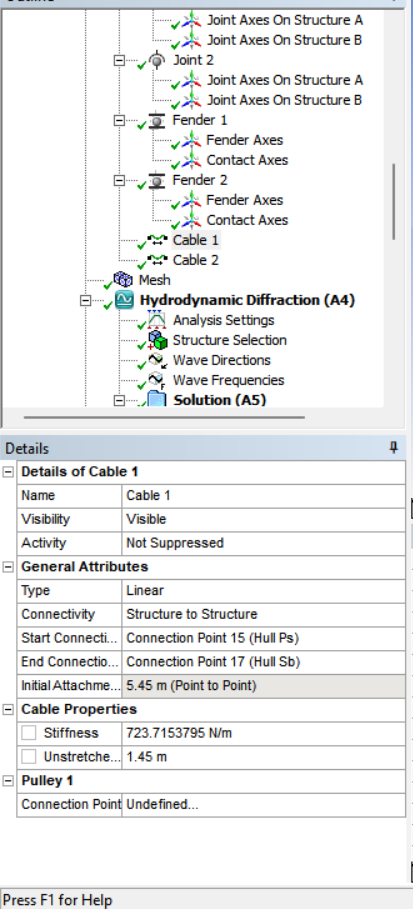
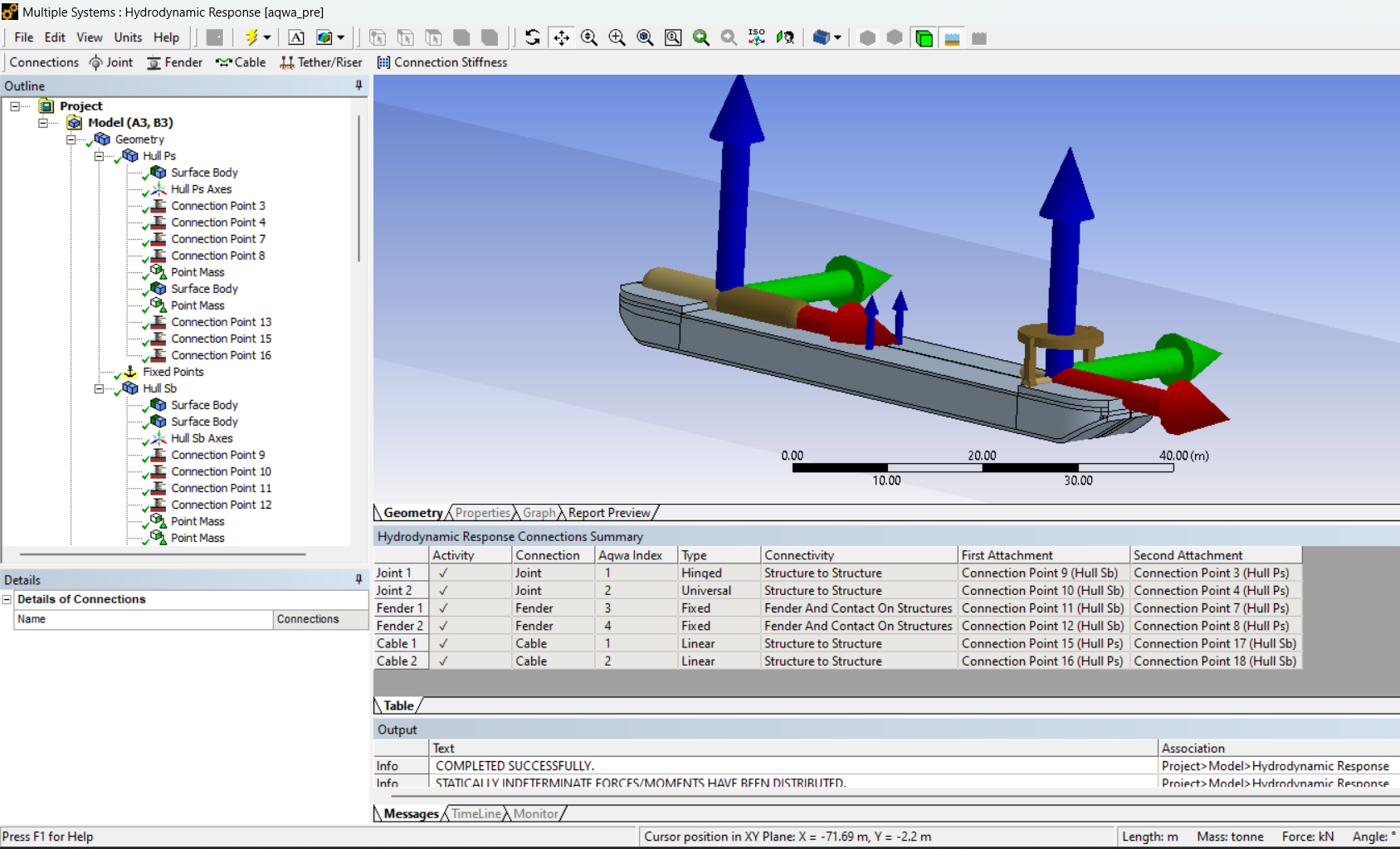 To simulate the hydraulic cylinder, I used two cables with initial tension placed below each joint. The initial tension in the cables was determined based on static force calculations.
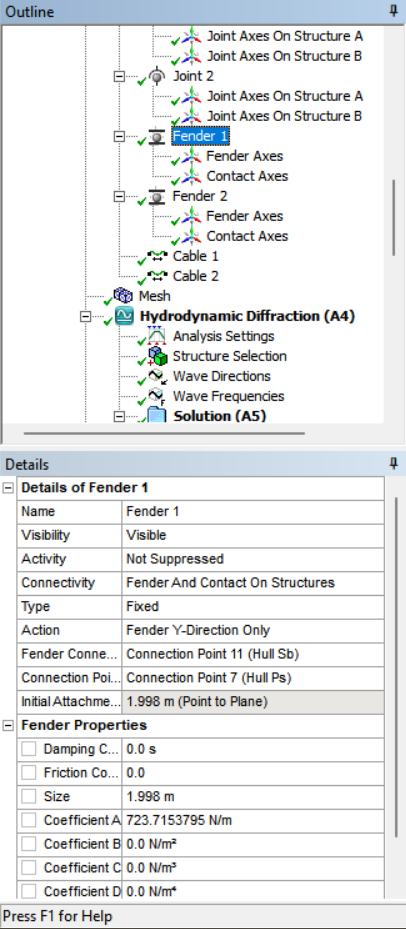
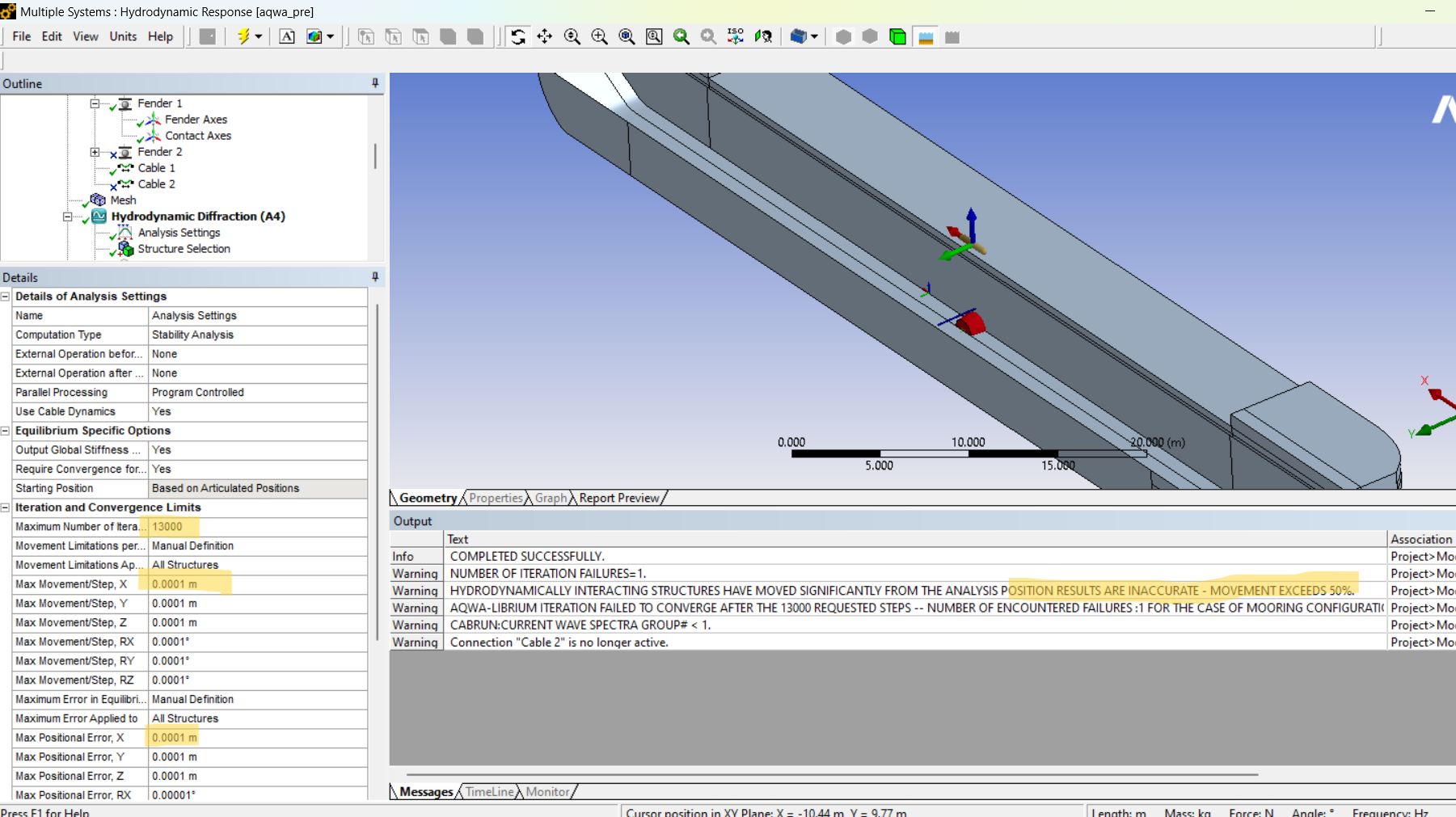
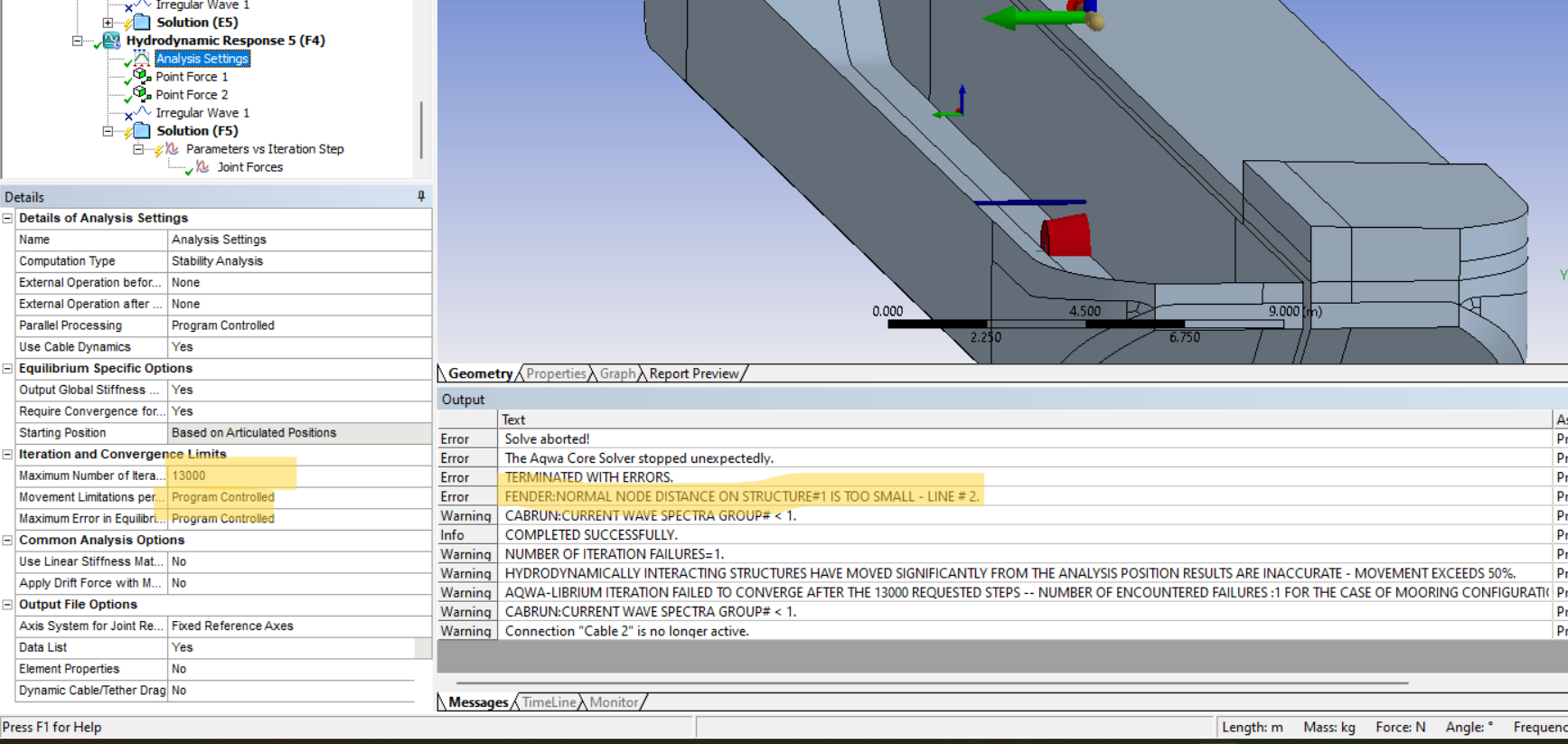
To simulate the hydraulic cylinder, I used two cables with initial tension placed below each joint. The initial tension in the cables was determined based on static force calculations.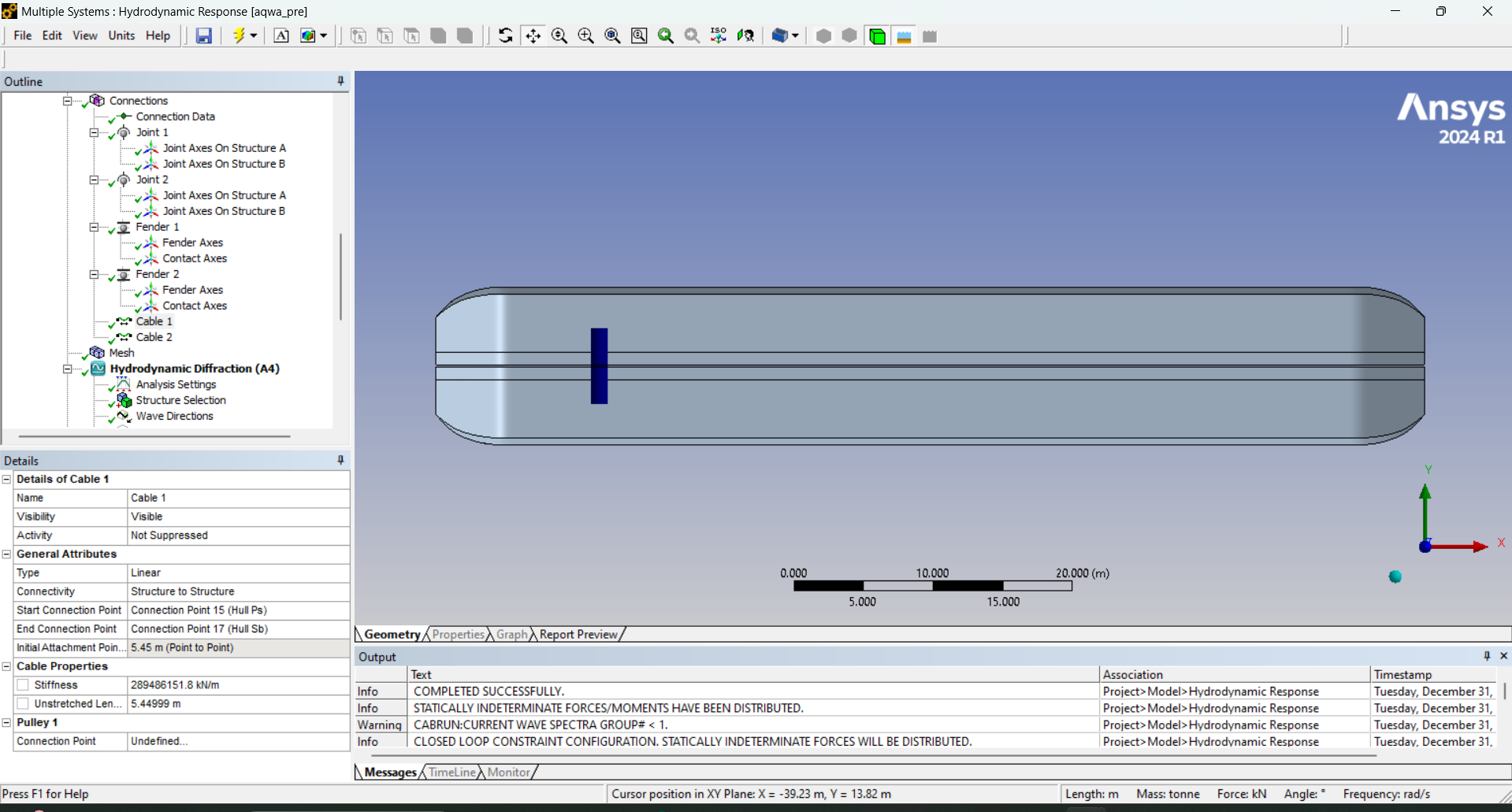 At the bottom, I modeled two fenders (forward and aft), as shown in the diagrams.
At the bottom, I modeled two fenders (forward and aft), as shown in the diagrams.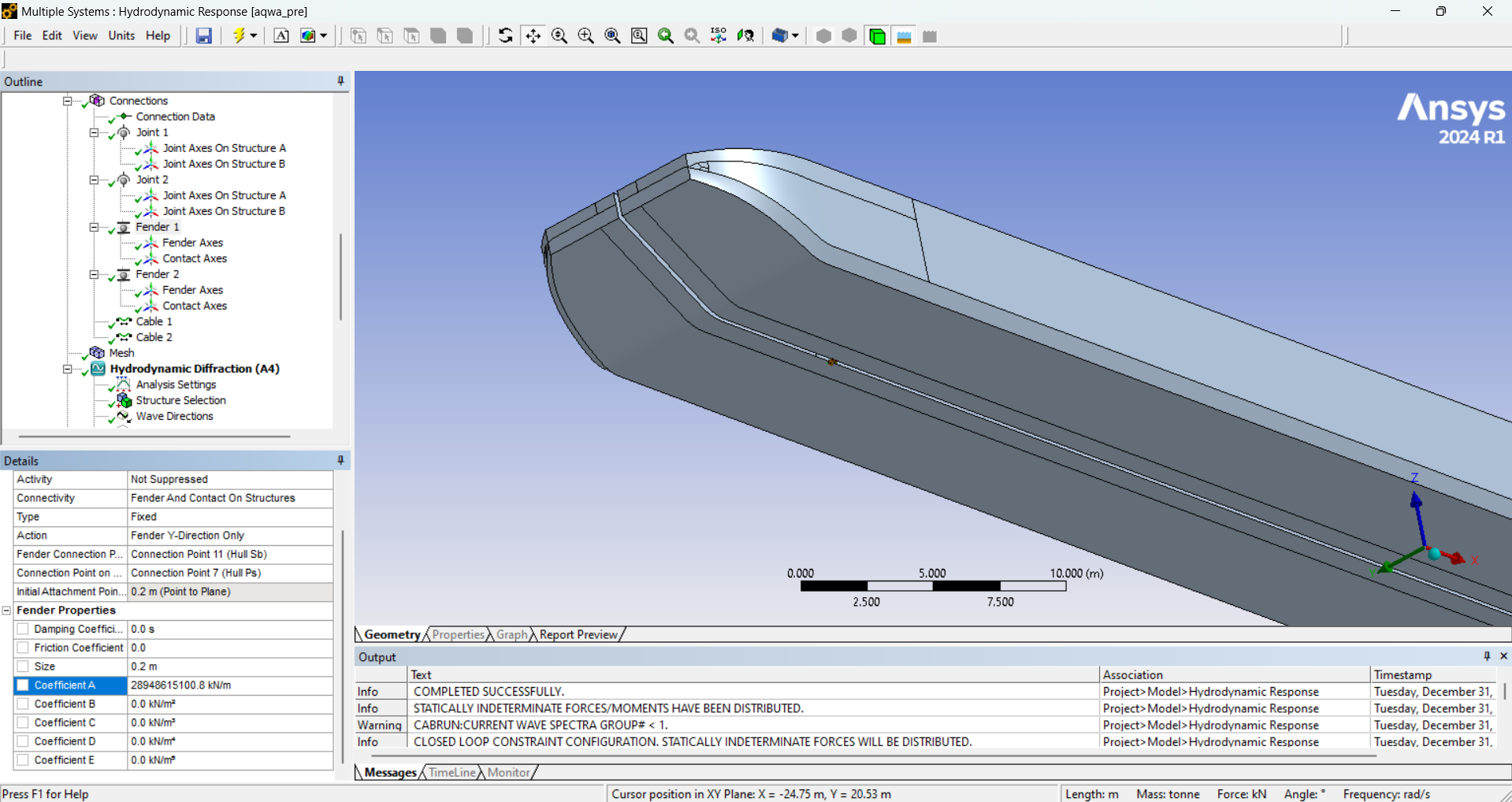
2. Simulation Results:
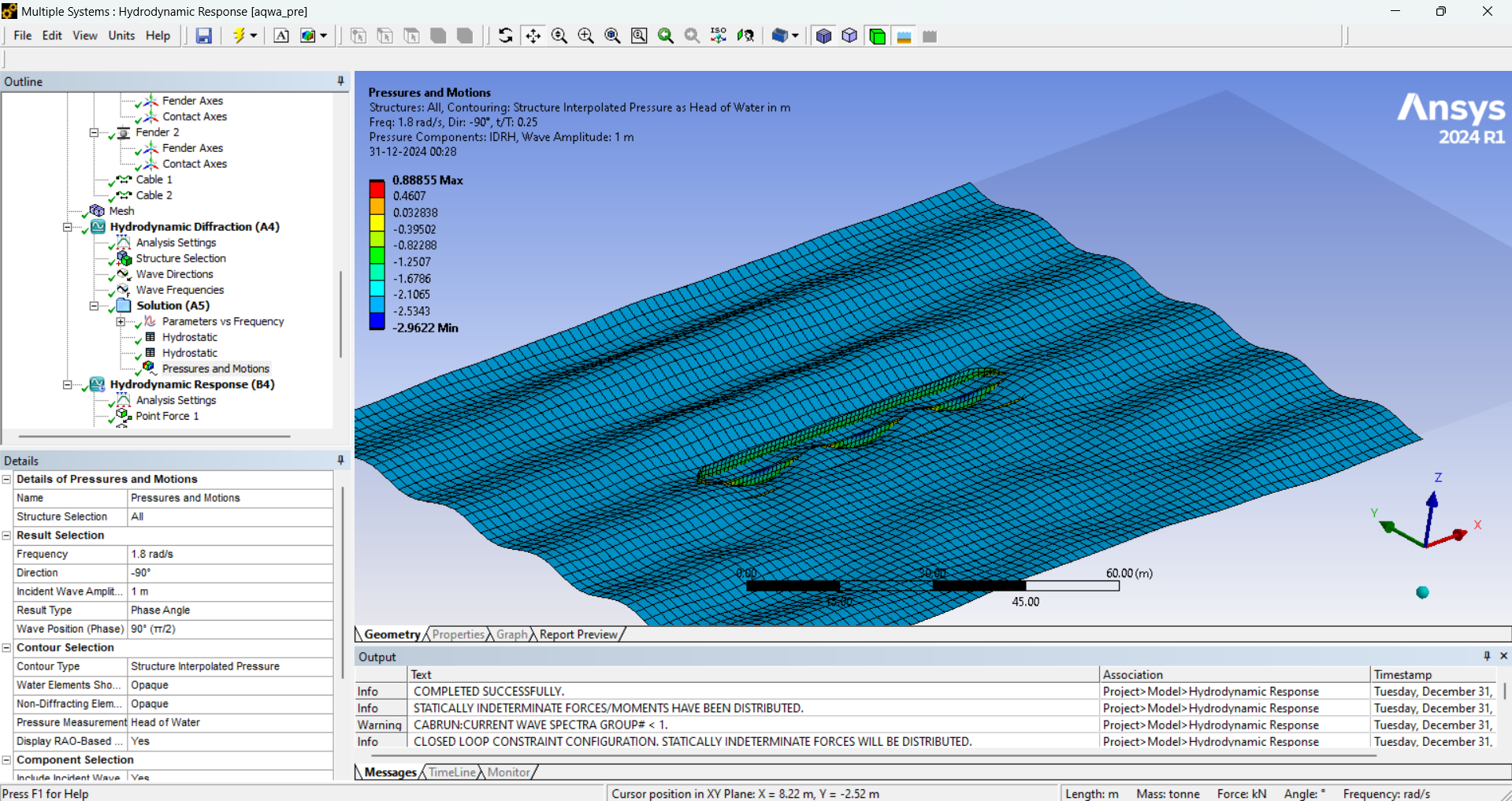
- Diffraction Analysis: The diffraction analysis ran successfully without any issues.
 Response Analysis:
Response Analysis:
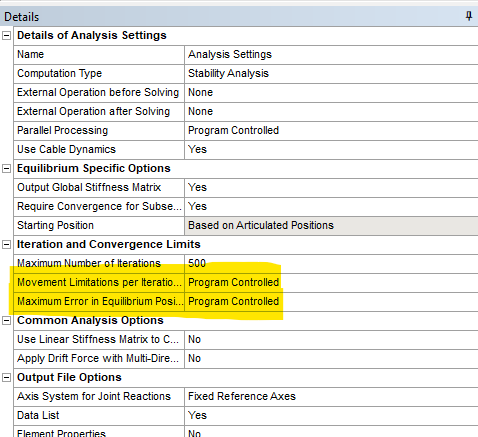
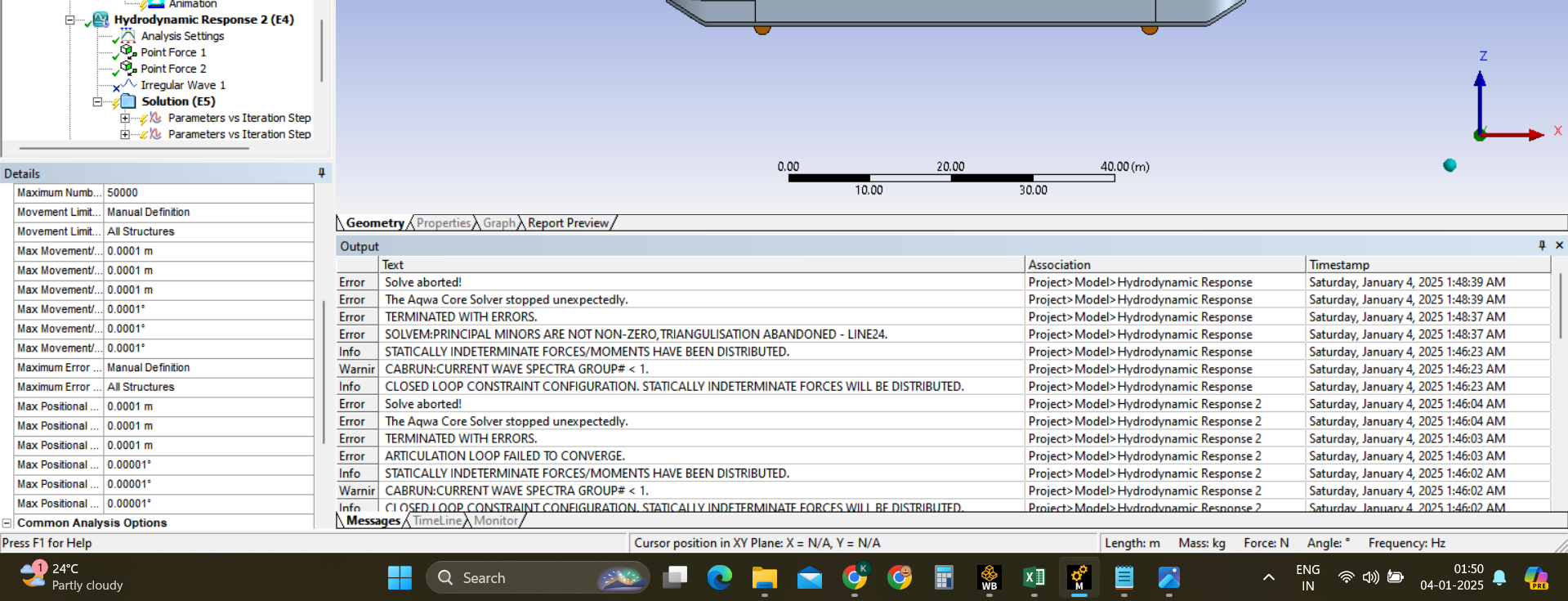
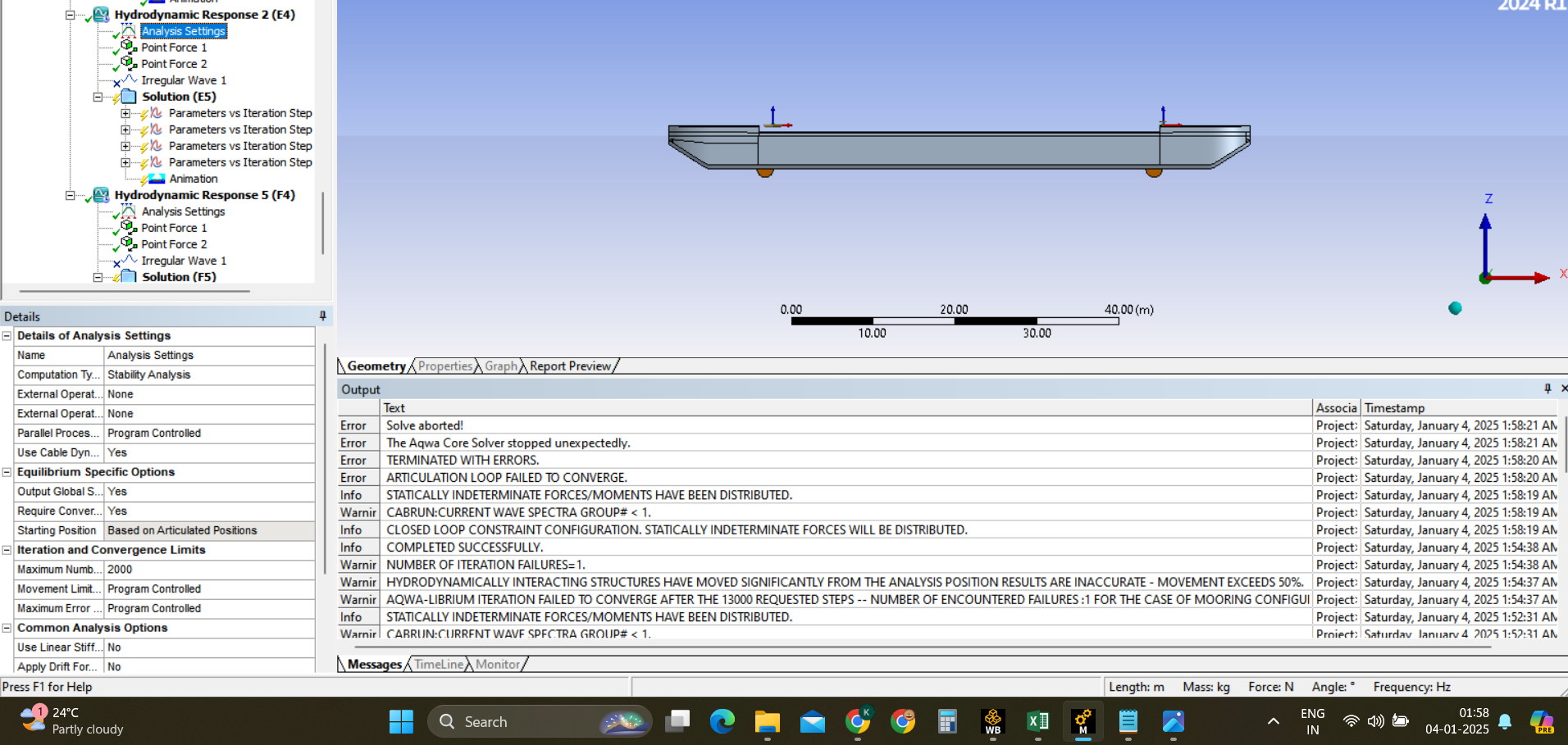
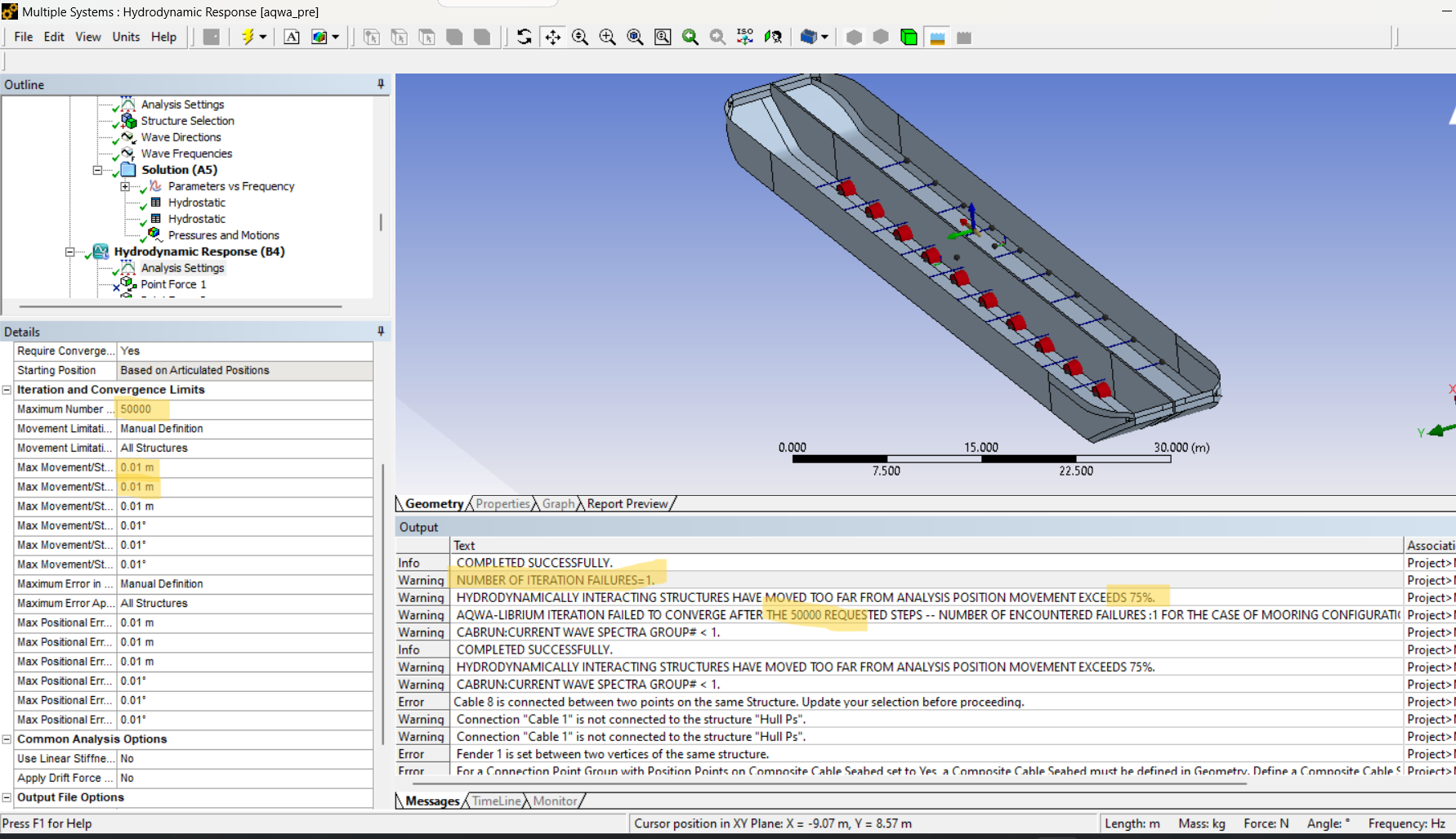
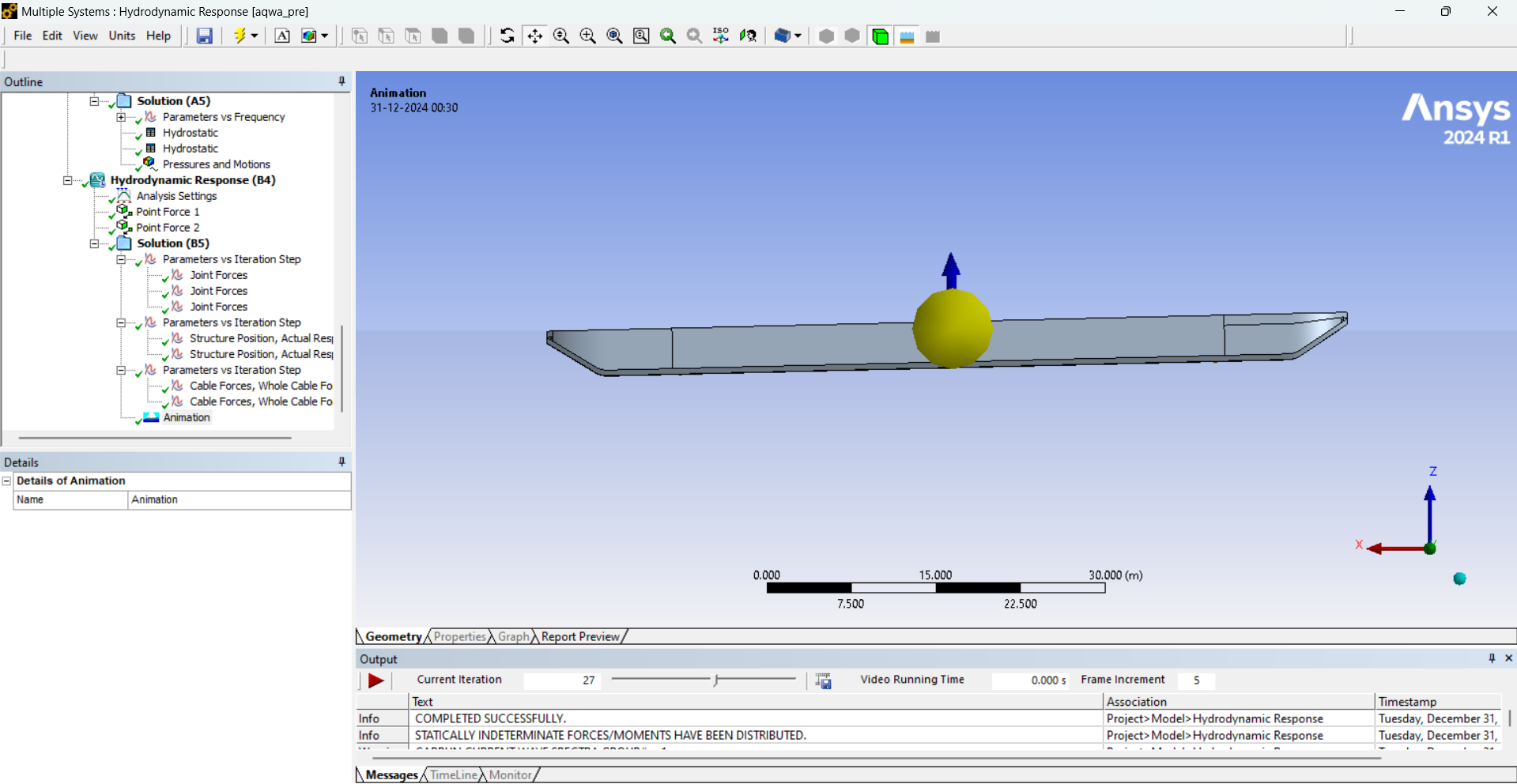
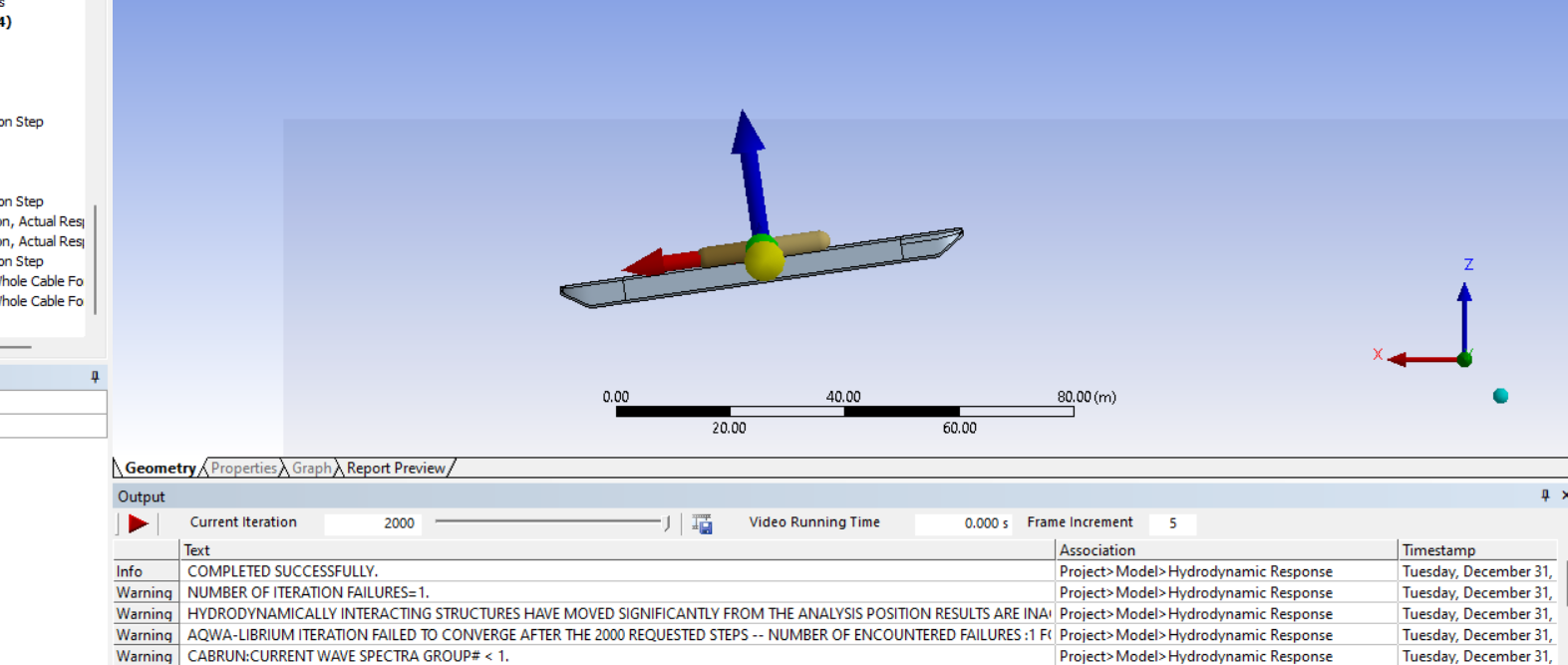
- During the stability analysis, the bodies are moving randomly, going above and below the water level unexpectedly.
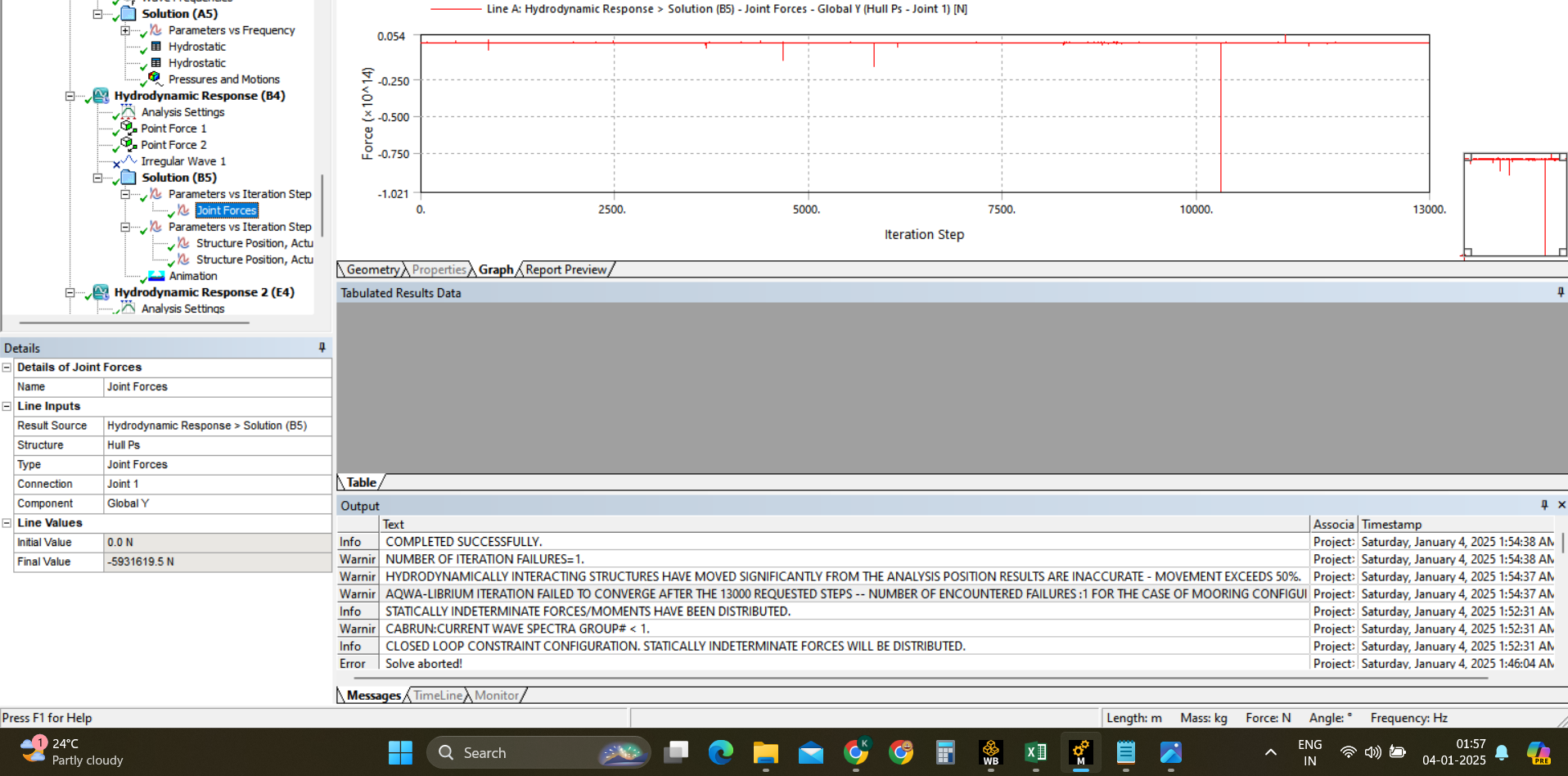
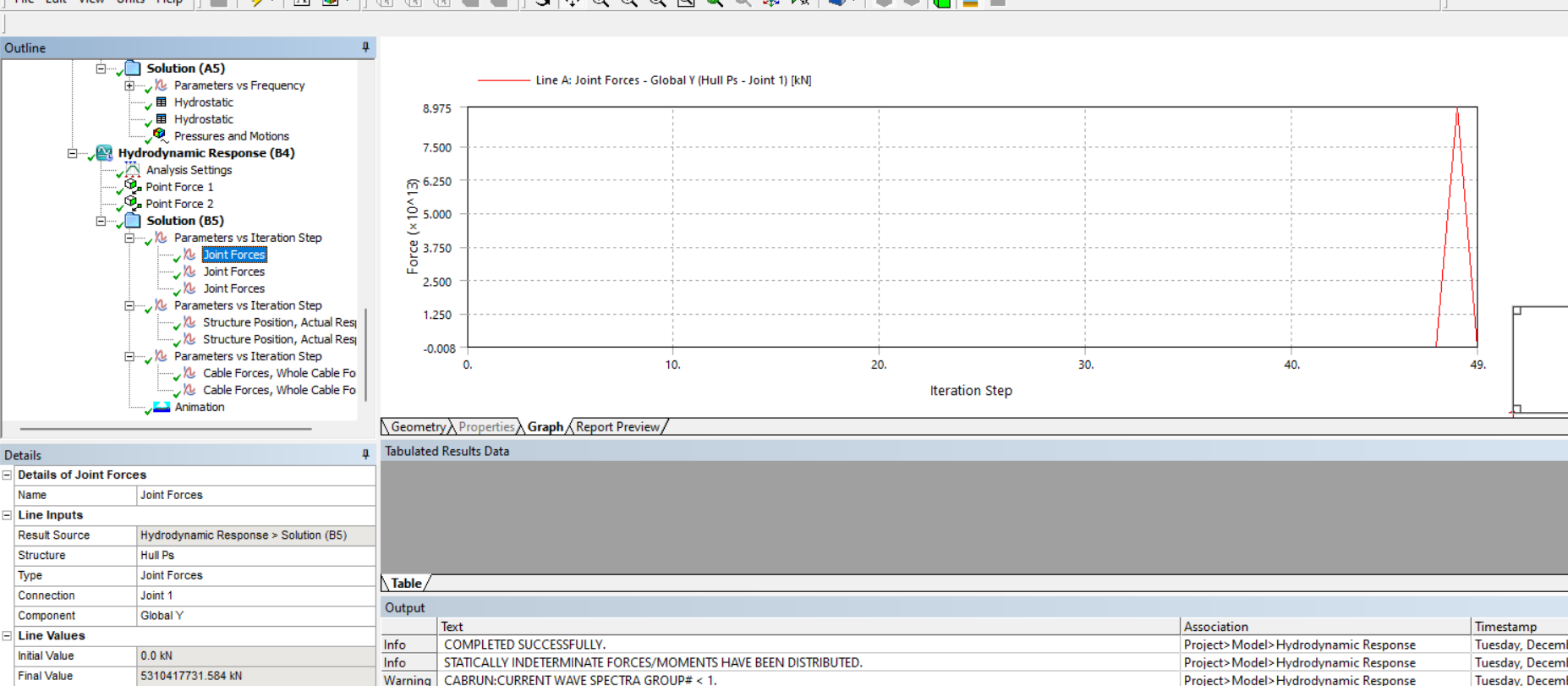
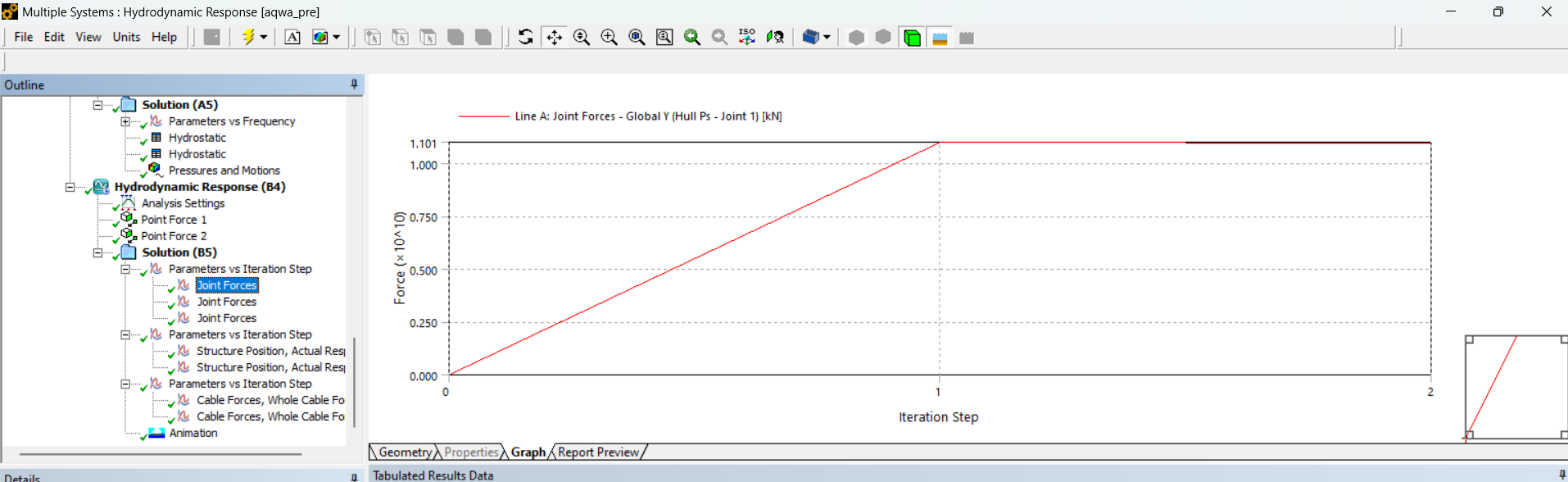
 The lateral forces at the hinges are excessively high, reaching values as large as 10^11kN. These forces should ideally be around 900 kN, as per static calculations
The lateral forces at the hinges are excessively high, reaching values as large as 10^11kN. These forces should ideally be around 900 kN, as per static calculations
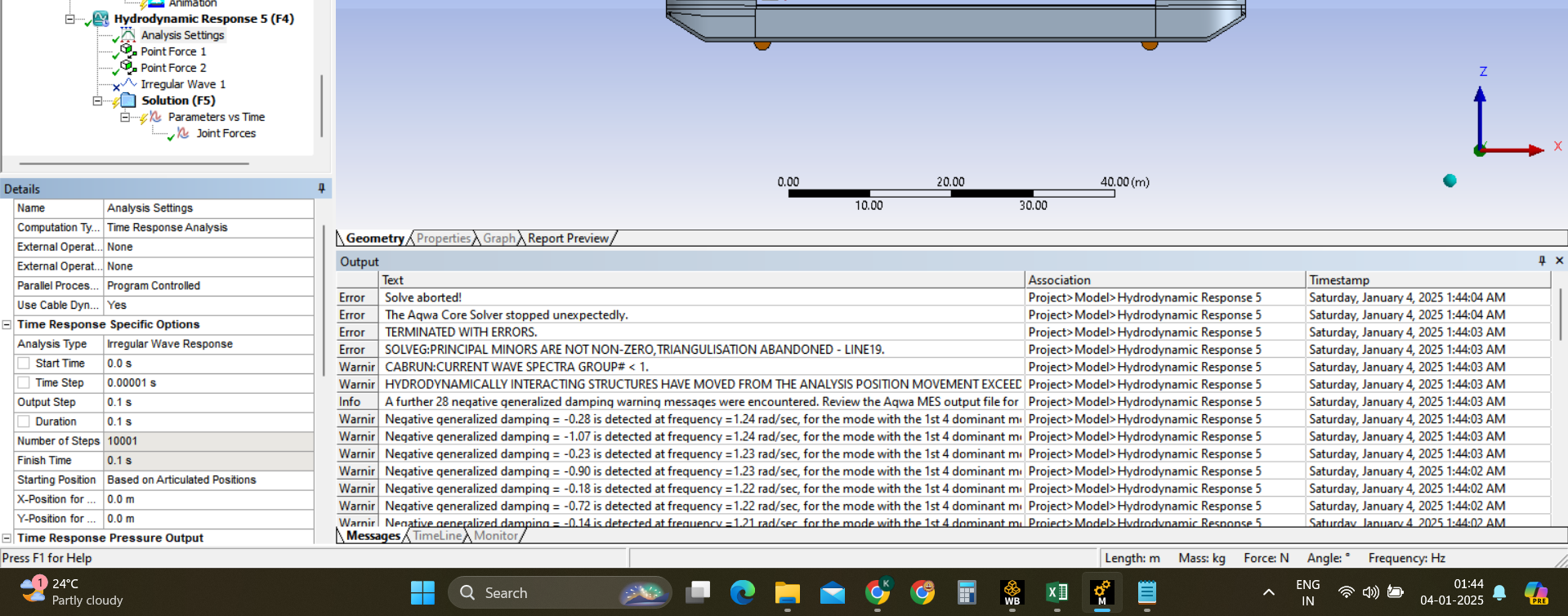
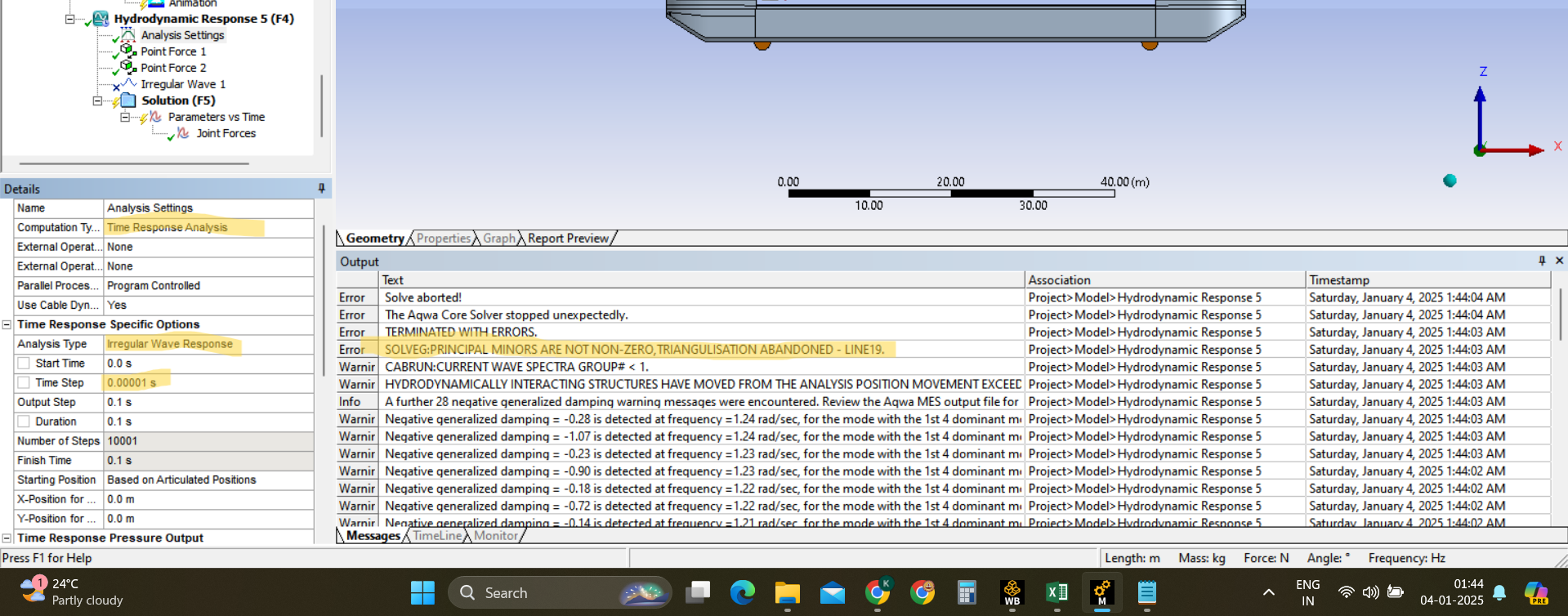
The time response analysis fails to run.
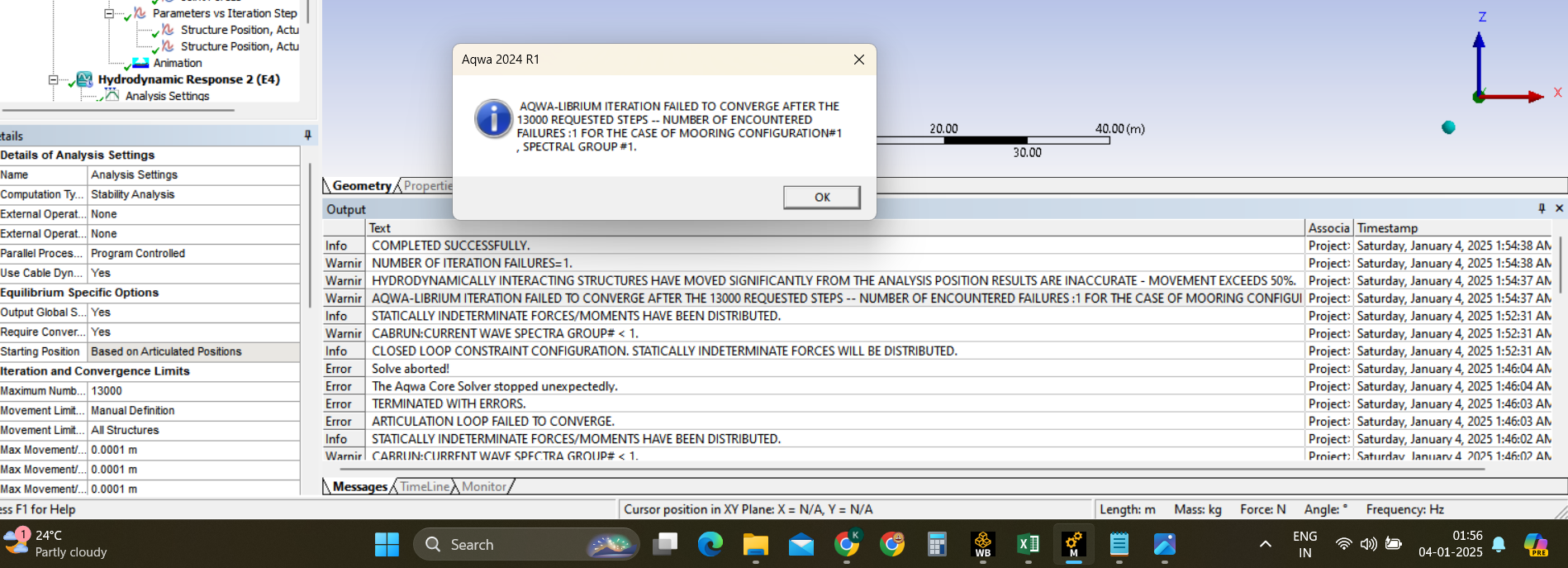
When attempting a simplified setup with a single hinge joint at the center of the vessel, the stability analysis does not converge.
Using a fixed joint at the center also results in unrealistically high lateral forces, which are not physically accurate.
 .
.
Request for Help:
I need this model for my thesis project and am looking for guidance on resolving these issues. Specifically:
- Why are the bodies moving randomly in the stability analysis, and how can I resolve this?
- What could be causing the excessively high lateral forces in the hinges?
- Are there any specific changes to the joint setup or modeling approach that could improve convergence and stability?
I would greatly appreciate any insights or recommendations from the community. Thank you!