I'm learning Topology Optimization also, I'm just one model ahead of you, so I don't know the answer to your question. However, I want to learn how to perform a proper T.O. so I will be reading up about it. I don't know if an 8 step analysis creates 8 conditions for the optimizer to analyze or not, but I found I could not create multiple Static Structural blocks to feed into a single Topology Optimization system and I know that multiple load cases are required.
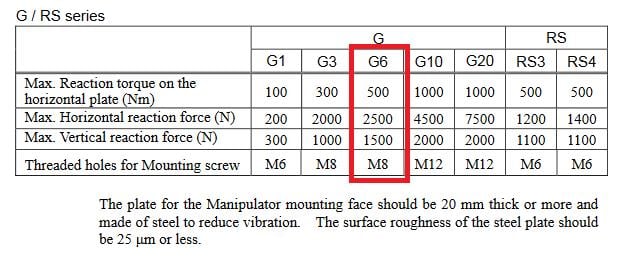
It is possible to combine multiple loads into a single step. A horizontal force, vertical force and moment can all be applied together, but there are two horizontal directions and the force and moments have to change sign, so what combinations will you use?
If the T.O. does use all 8 steps, there is a way to have the solution run faster. Since this is a linear system, after the first load step has solved, there is no need to invert the stiffness matrix again and again to compute the results for load steps 2-8. They can be calculated from the previous stiffness matrix. I can insert an APDL Command that tells ANSYS to reuse the previous stiffness matrix and I get the same results. I found the KUSE,1 command, in combination with choosing the Direct solver, can save 11 seconds on each solve which doesn't sound like a lot until you multiply it by 500 T.O. iterations and you just shaved 1.5 hours off the wait time.

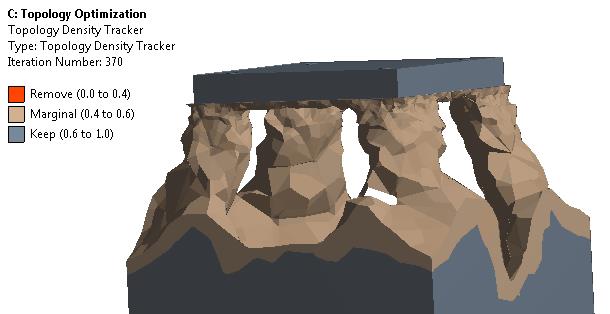
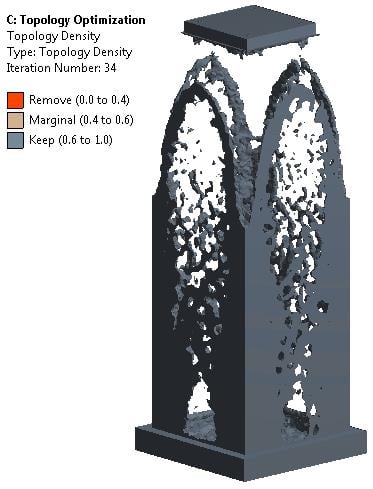
I will add those improvements to the next archive. Here is what the archive I attached above (6 steps, no vertical) does after 370 iterations on my 8 core computer. It hasn't converged, it's still calculating, but it looks like the mesh is a bit too coarse to give a nice surface. When more elements are used, the solve time will increase, so it will be even more valuable to reduce the solve time with KUSE and Direct.