I have a geometry of two metal bodies (a circular drum and a wedge) and I want to study the deformation during thermal expansion and a force applied at the bottom edge pointing towards the drum center. I expect to see expansion of the wedge in the azimuth along the circumferance of the drum.
General conditions:
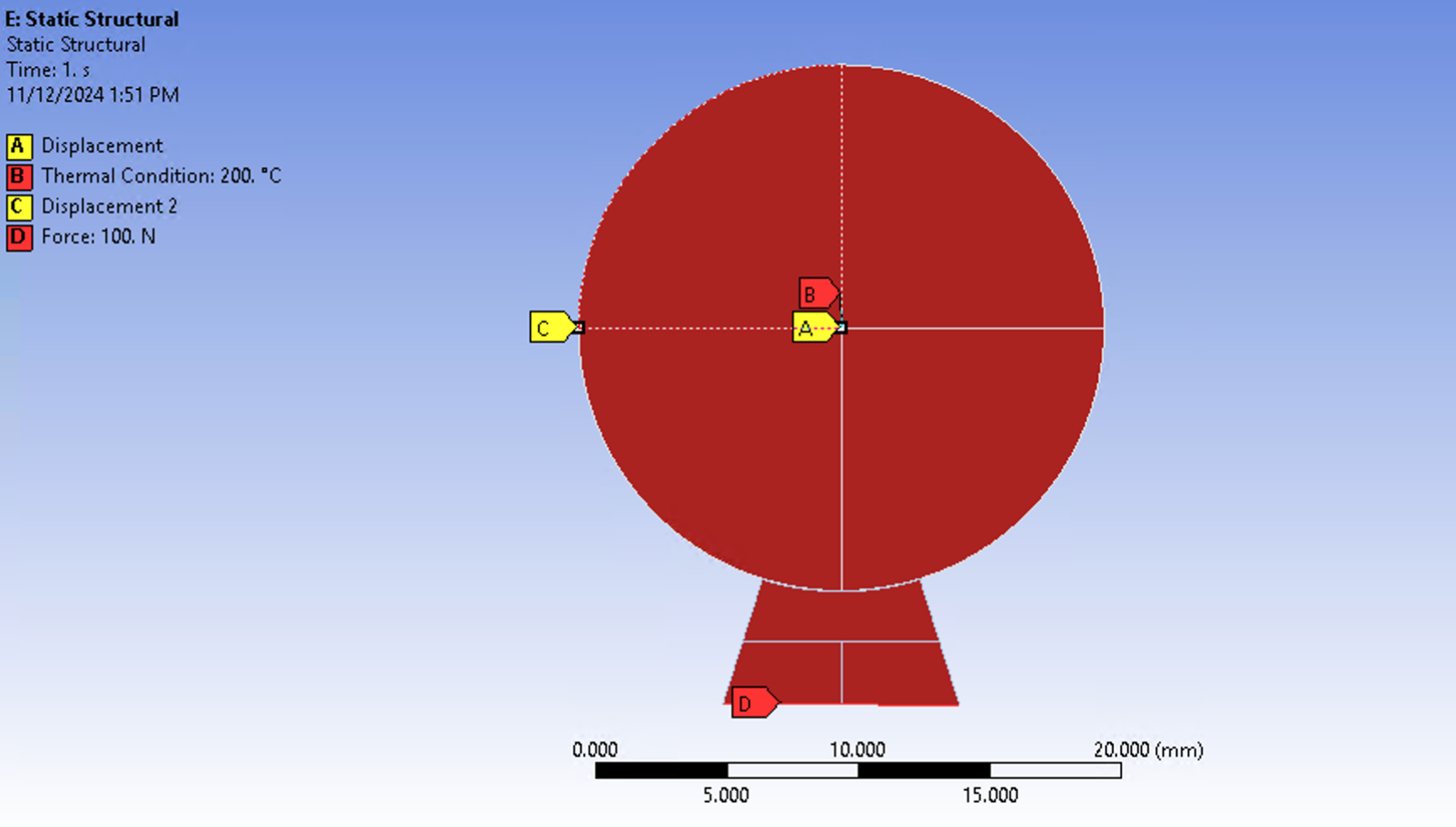
- The center of the drum should be fixed
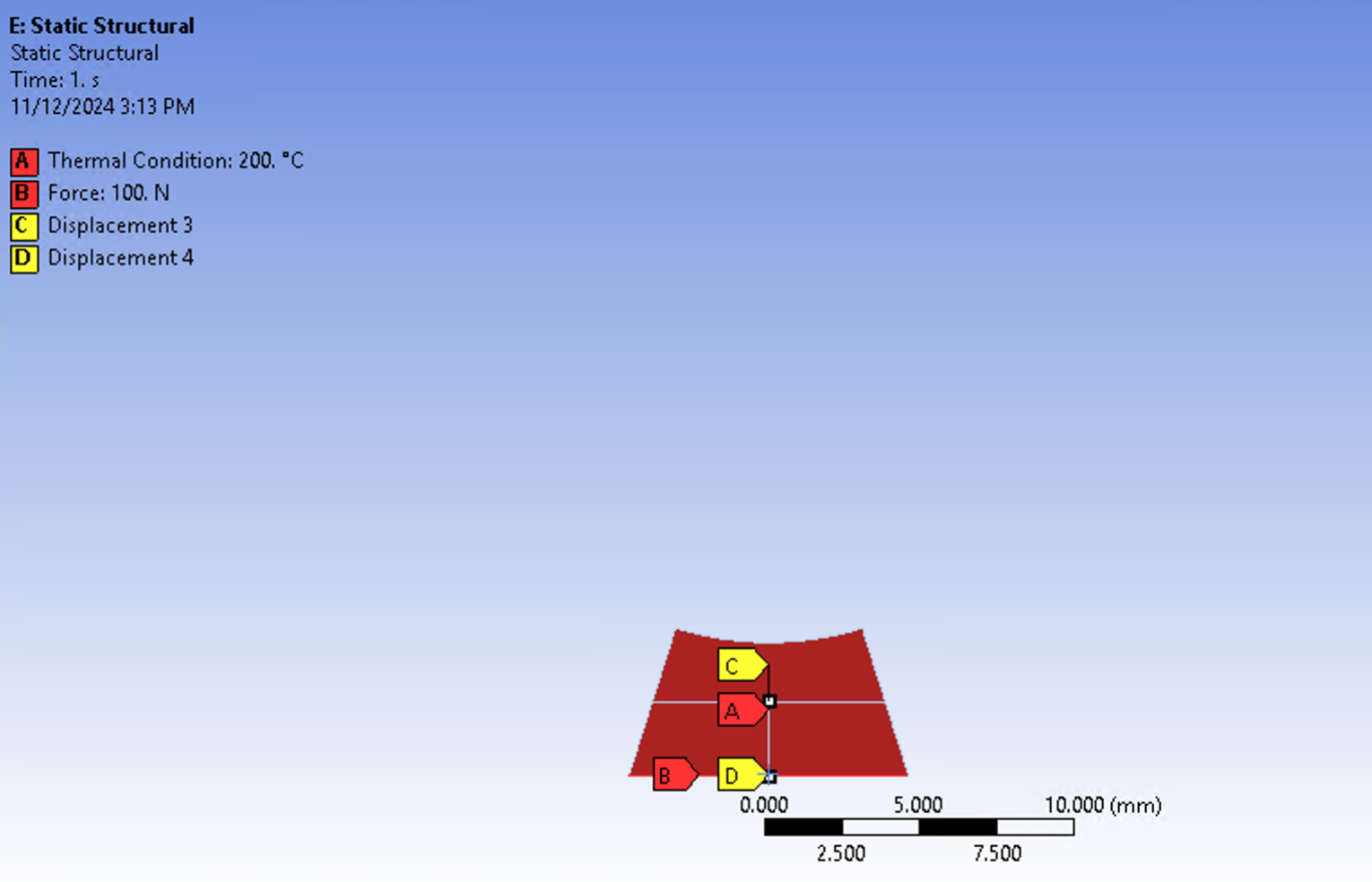
- The center of the wedge should only move in the radial direction
- There is initially a very small gap between the bodies
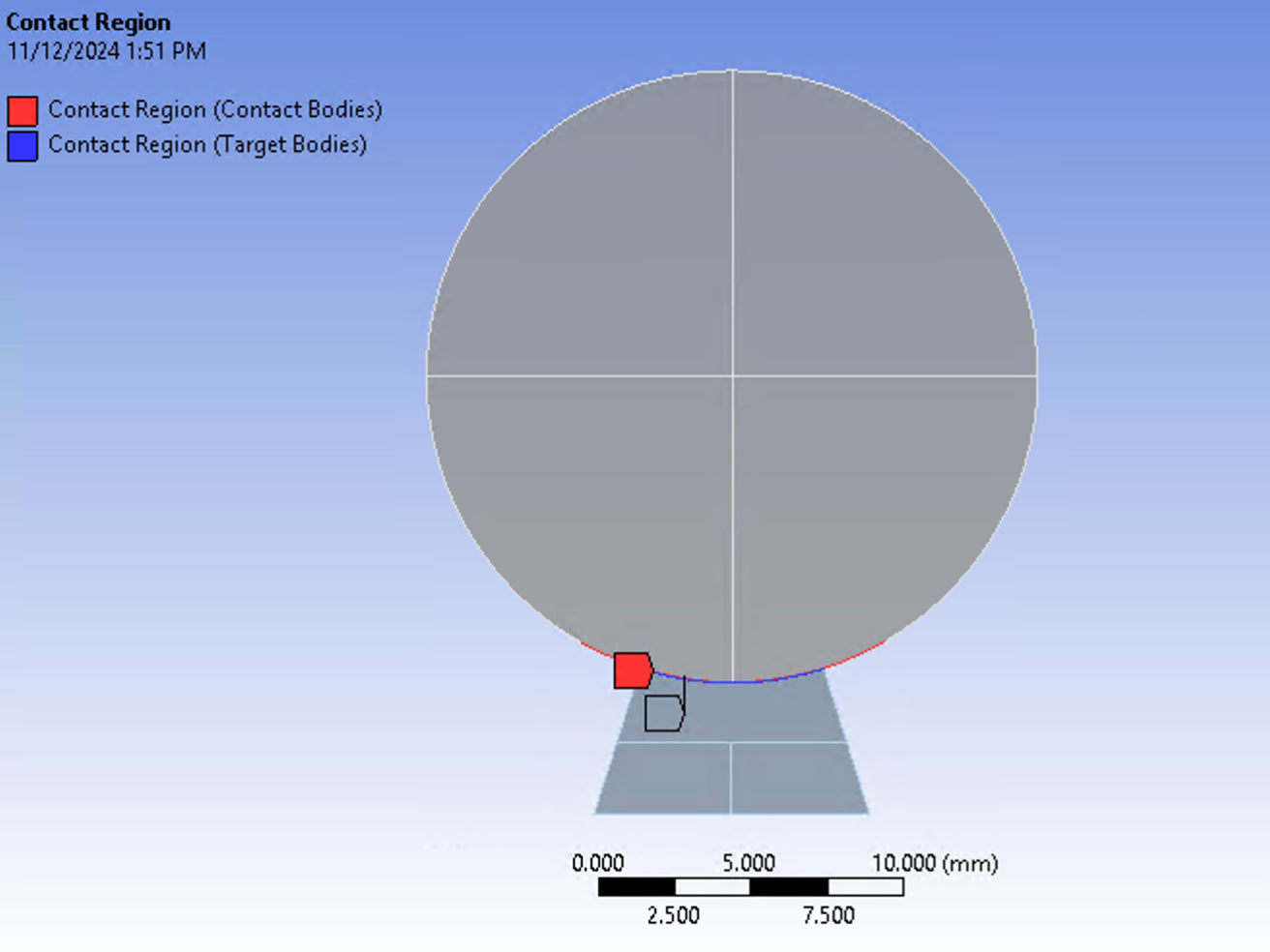
I am struggeling with applying the correct BCs and contacts. My initial setup was the following:
- Bonded contact
- Fix rigid body motion for the drum by constraining both degrees of freedom at the center of mass and in the Y axis at the edg
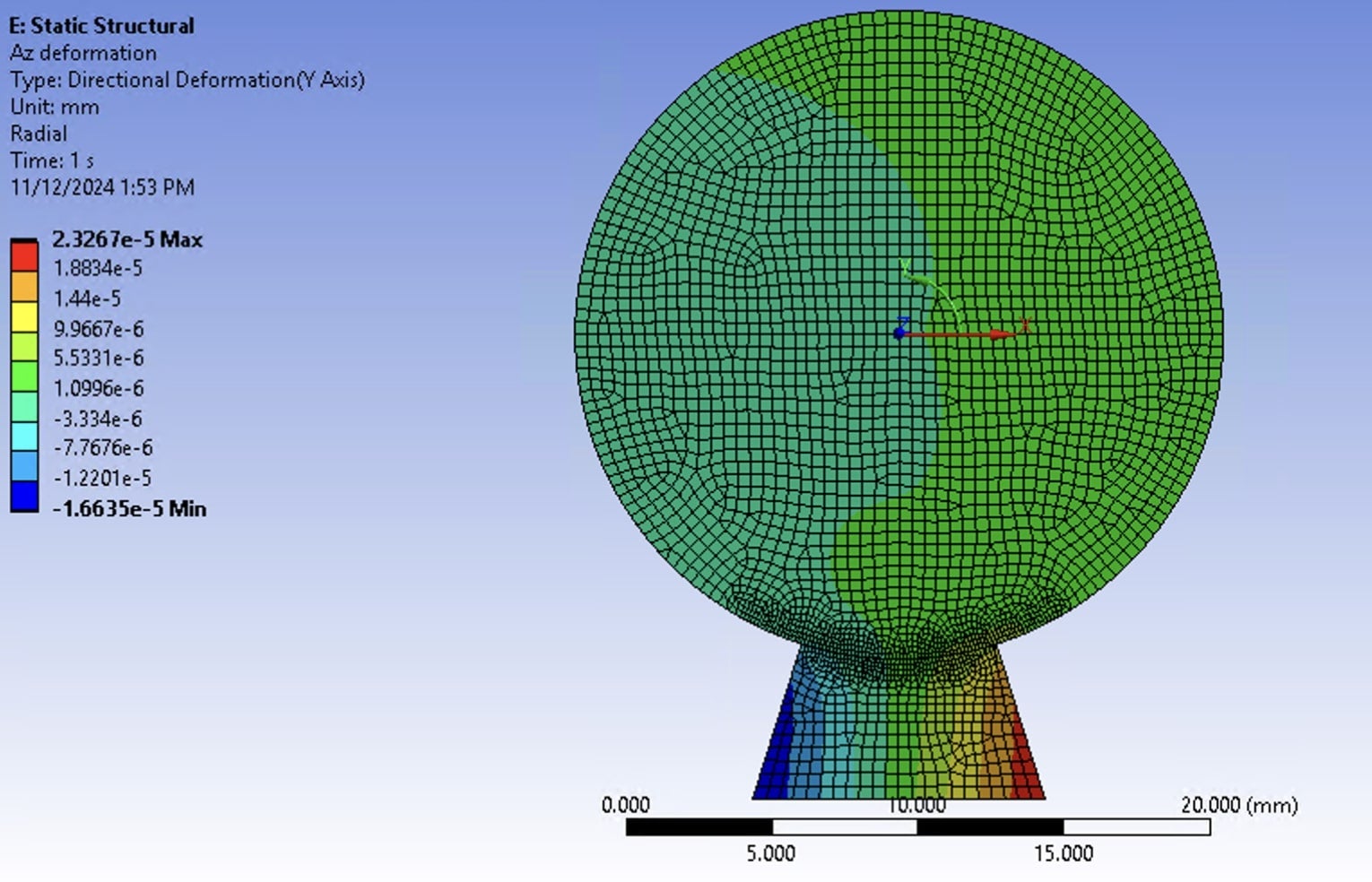
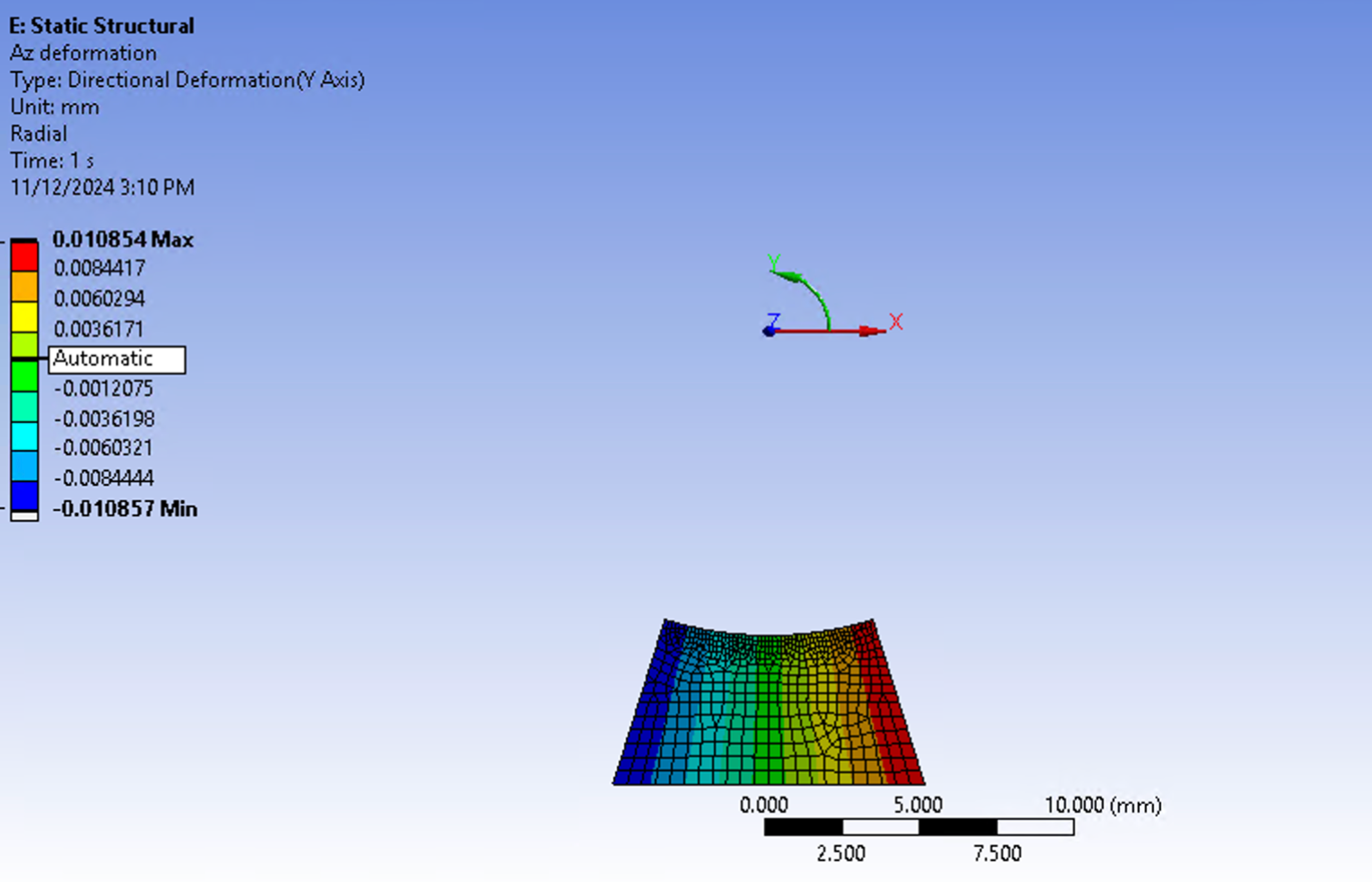
The expansion in the wedge along the azimuth is much lower than I would expect from both analytical estimates and simulating only the wedge while allowing free thermal expansion.
My understanding of thermal expansion is that in the bonded contact setup, every node will expand away from the center of the circular drum, leading to these results.
This lead me to change the contact from bonded to frictional and add an additional radial only displacement in the wedge center to allow the wedge to expand freely independent of the drum, but now I am getting convergence issues and rigid body motion warnings due to the wedge beeing underconstrained.
Any tips or suggestions?
This is simplified version of the real geometry, so looking for general tips for how to approach this problem. In reality the geometry is more compelex (additional bodies) and without symmetry.
















