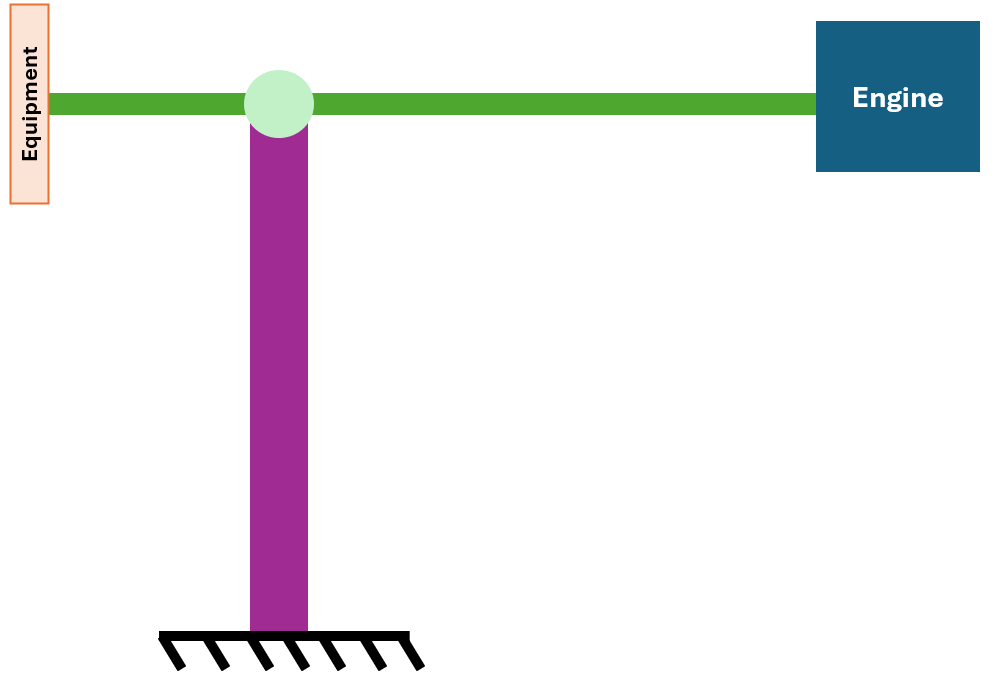
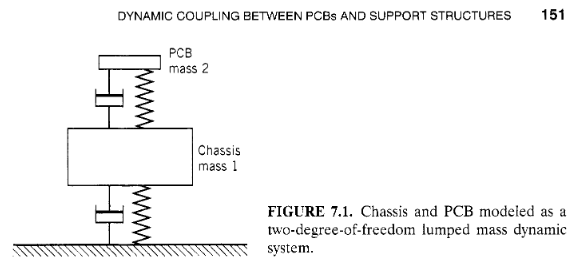
I recommend doing some reading on vibration isolation system design. A good reference textbook that I own is Vibration Analysis for Electronic Equipment by Dave S. Steinberg. Chapter 7 is Octave Rule, Snubbing, and Damping to Increase PCB Fatigue Life. Chapter 9 is Designing Electronics for Random Vibration and 9.23 is the Octave Rule for Random Vibration. Steinberg uses a simplified representation of a chassis and a PCB. These are represented by a spring-damper from the engine frame where the PSD input is present, to the chassis which is represented as a point mass, then another spring-damper from the chassis mass to the point mass that represents the PCB. The chassis is usually going to have more mass than the PCB. Since the chassis mass and PCB mass are connected by the spring-damper connecting them, dynamic coupling occurs.
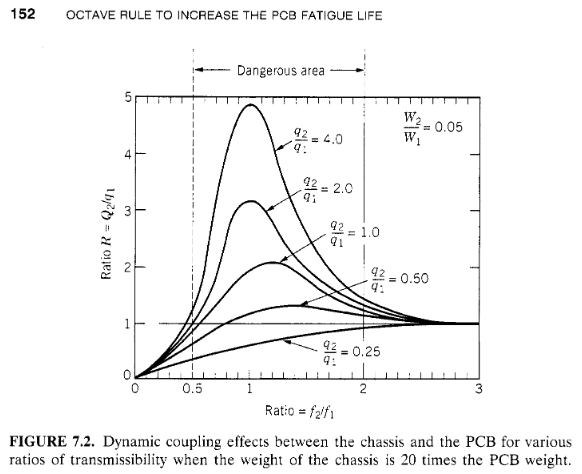
You should build a Modal analysis of the chassis of the measurement equipment box. The bolt holes that connect it to the motor frame become fixed supports. Internally, the lighter and more delicate measurement instruments are connected to features inside the equipment box chassis. Look at the natural frequencies of the structure of the chassis supporting the measurement instruments. Now build a Modal analysis for each of the measurement instruments only. The features that hold each instrument to the chassis become fixed supports. The resulting natural frequencies of the chassis and the various instruments should be separated by more than one octave (a factor of 2) to avoid severe dynamic coupling. For example if the chassis has a natural frequency of 100 Hz, each instrument must have its first natural frequency be greater than 200 Hz. This is called the Forward Octave Rule. You would change the design of the chassis to achieve this result, assuming you don’t design the instruments. When you do that, the PCB is beyond the Dangerous area because the frequency ratio is greater than 2.