Hi Vignesh,
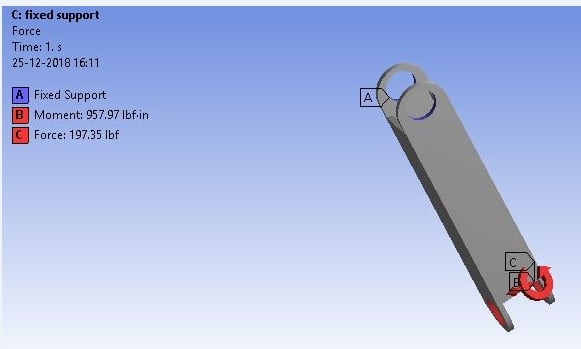
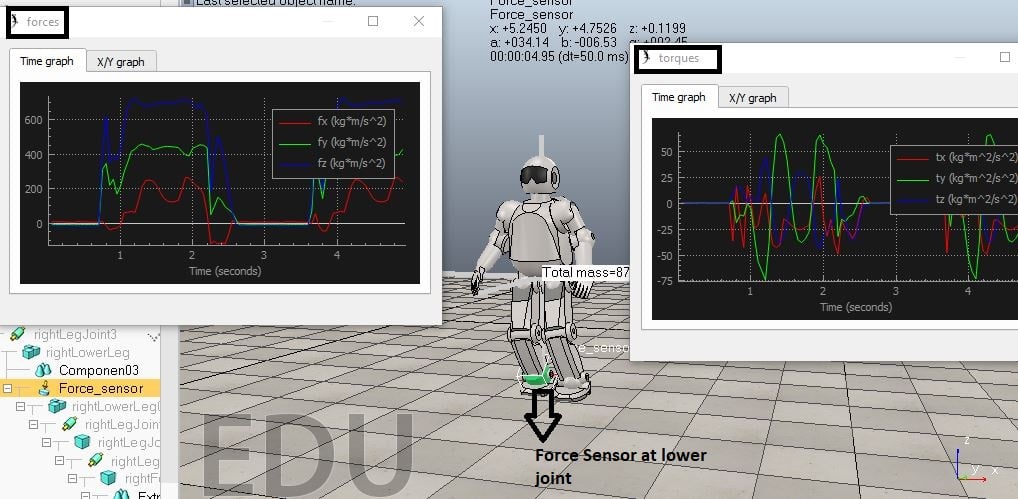
In a simulation, a lot of detail from the real world can be left out. In the Dynamic model, you can define a motorized joint through the axis of the two holes at end A and another motorized joint through the axis of the two holes at end B and get output data on the force and torque. I understand that.
Now you want to know the stress in the part due to that force and torque. This is where the real world detail needs to be considered. The motorized shaft that is coupled to end A has features that clamp it to those two holes and those features are not in the model.
If the maximum stress occurred some distance away from the two holes at end A, then you would be fine to use fixed support on the ID of the two holes. The problem is that it looks like the maximum stress will be in the material around the two holes at end A, so if you just fix those faces, you will introduce an error compared with having the detail of how the shaft actually couples to the two flanges of end A.
Regards,
Peter