Thank you very much for your prompt and detailed response, and for taking the time to explain this so clearly. It helped a lot.
I would like to clarify my understanding of the validation approach and the suggestion to use benchmark problems.
From my understanding, benchmark problems (e.g., NAFEMS) are mainly used to verify whether a numerical implementation (e.g., MATLAB Crank–Nicolson discretization) is mathematically correct.
However, in my case, the MATLAB model is already based on the formulation from the reference paper (), where the parameters are normalized (e.g., ρ(mass per unit area)/D(stiffness) = 2), and my goal is not to verify the discretization itself but to calibrate the stiffness parameter using ANSYS as a reference.
So my current approach is:
- Use ANSYS as a “ground truth” model with physical parameters (E, ρ, ν, h)
E = 7 × 10^10 Pa
ρ = 2700 kg/m³
h = 0.00046 m
ν = 0.3
- Ensure these parameters satisfy the normalized ratio used in MATLAB (ρ/D = 2)
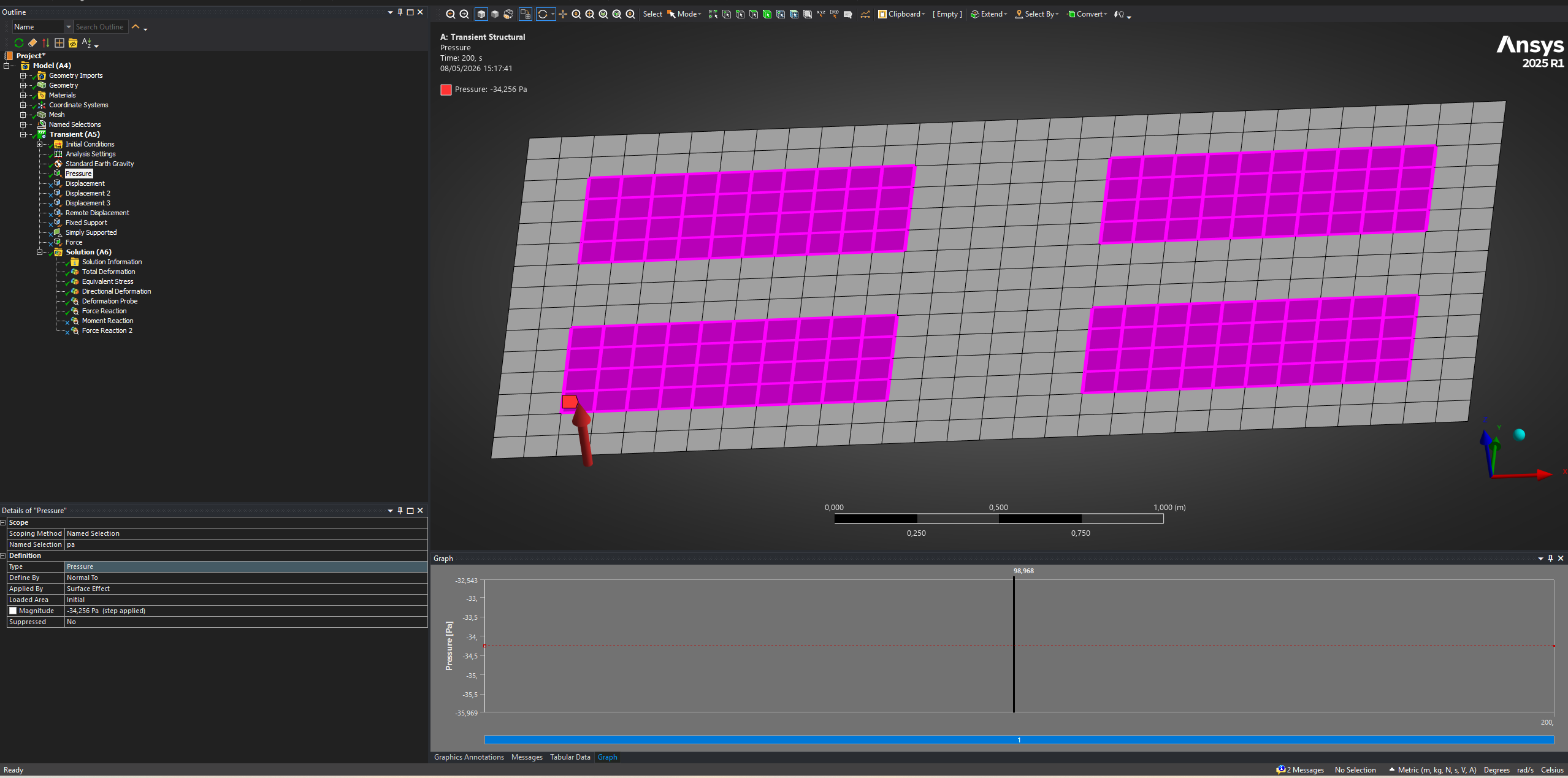
- Apply the same loading scenario (gripper patches + gravity)
- Compare steady-state deformation
- Tune a stiffness scaling factor in MATLAB until the deformation matches ANSYS
My questions are:
1) Is it correct that benchmark problems are not necessary for my current goal (since I am not validating the numerical scheme, but calibrating model parameters)?
2) In the MATLAB model, the boundary conditions are fully free, and gravity is balanced by upward forces applied over four symmetric patches (gripper regions).
To replicate this in ANSYS, I considered two approaches:
- Applying distributed pressure over the same four patches (to balance gravity), with weak springs enabled for stabilization- Applying remote displacement at the four patches (Z displacement fixed, rotations free)
Which approach is physically correct and more appropriate for this scenario of distributed pressure with weak springs, or remote displacement constraints or other which I should explore?
If you need any additional information, I will provide it promptly. I am currently exploring applicable options, and your guidance is extremely helpful in clarifying the right direction.