Hi.
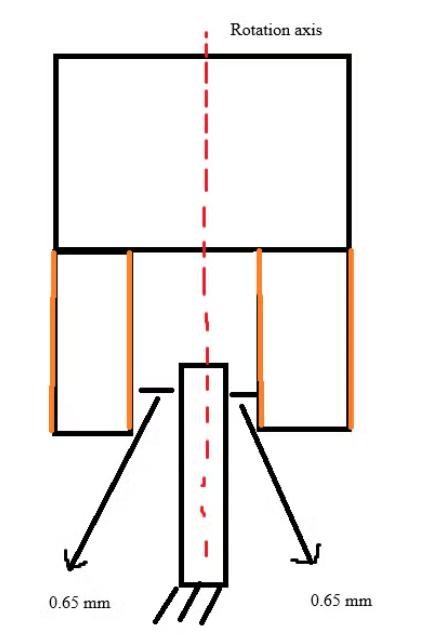
I am trying to simulate a pin breakage analysis by rotating a part around an axis further 124mm from the surface and making forks of the part colliding with the pin. Since LS-DYNA does not support Deformable Remote Displacement, I use Displacement with 160 substeps ending at 0.25s on horizontal axis instead. 4 seperate Frictional Contacts are defined, each having one of the surfaces that will collide to pin (orange surfaces) as contact and pin surface being target. Part is expected to displace 6.5mm in horizontal direction 3 times, making an oscillated motion, so outer surfaces of the rotating parts are expected to connect with the pin too after reaching to maximum displacement point and moving to negative maximum displacement point. Pinball Radius is set to 1e-3mm, which is the approximate length that part moves at every step, and their center points lie on contact (orange) surfaces. Time Step Control is set to Predict for Impact. Add Offset, No Ramping = 0mm and 0.8 and Adjust to Touch was set, ghost connecting occured at every situations. Augmented Lagrange is used to prevent any penetration. Body Interaction that LS-DYNA auto-generates is suppressed.
The problem is, even time increments and pinball radius are small, as the part is closing the gap of 0.65mm by moving, stress and displacement (bending) occurs on pin. And after the fracture, pin climbs upwards through the rotating part, even though Standard Earth Gravity is defined downwards. I guess the friction that occurs against movement, which I guess to be downwards, pulls the pin upwards. Pin is extremely light, approximately 4g, friction coefficient is 0.2 and dynamic coefficient is 0.18.
a) How do I prevent ghost-contacting that occurs even when part and pin are not touching each other?
b) How do I prevent pin lurking up to rotating part after fracture?
c) Are there any ways to utilize Remote Displacement without Rigid behavior, so I can use it instead of horizontal movement Displacement to simulate the rotation?