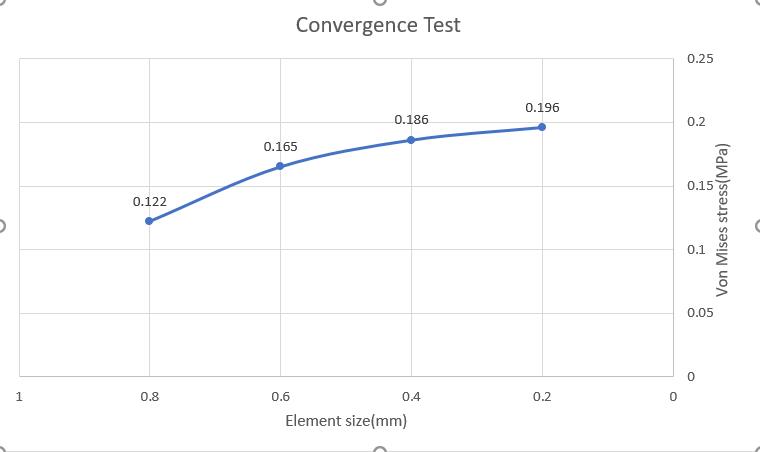
Do a convergence test on the quantity you care about. For you, that is force.
To simulate a contact that can separate, the only choice is Transient Structural without connecting any Modal solution into the Setup cell. A Transient analysis requires you to use a force vs time input. That means you have to type the equation using A*sin(f*time) into the Force details. A is the value you were using in Harmonic Response while the constant f defines the frequency of oscillation. There is a place to type Segments, which must create 20 points per cycle. If you want to simulate 1 second of 30 Hz, then you need Segments to be 20*30*1 = 600. To simulate 1 second, under Analysis Settings, the Minimum Substeps must be 600 also.
A Transient Structural model with that many nodes will take tens of hours to run and require maybe a TB of disk storage unless you turn off Strain and maybe Stress in the output controls. I don't recommend you go to Transient Structural.
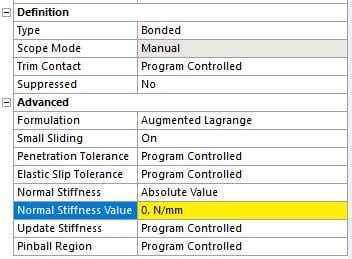
The device has a soft silicone rubber (low Young's Modulus) covering a hard plastic plate (high Young's Modulus), but you haven't modeled that composite structure. I recommend changing all the frictionless contacts to Bonded Contact. You can change all of them at once by selecting them all. The details window will change all of them. In addition, change the Normal Stiffness Value. That way, the tooth will have the correct low stiffness connection to the plate.
Once the teeth are all bonded to the plate, you can delete the bogus displacement boundary condition on the four edges of the plate at the far end. Those are not real.