Thank you very much, Mike. I was able to scale through that but i ran into multiple problems. Why is the buoy sinking instead of floating in the hydrodynamic response animation window. 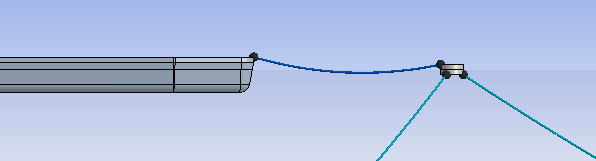
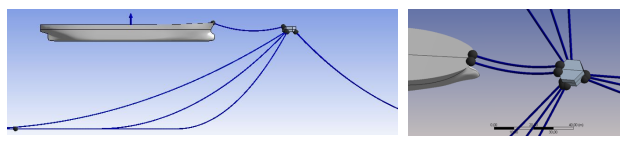
Before the hydrodynamic response solution
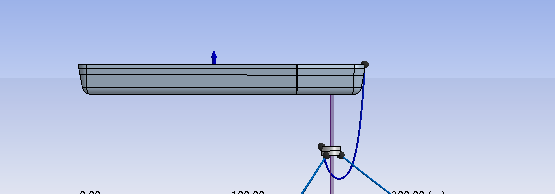
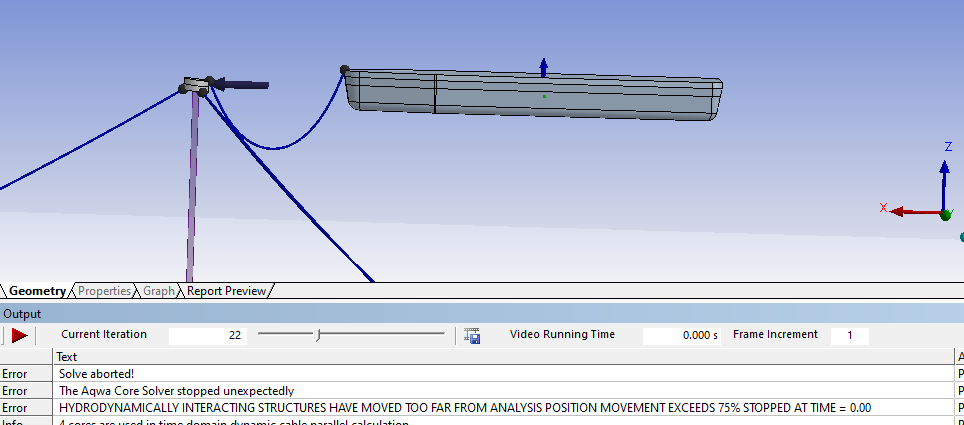
After the solution.
Also i noticed that my ship actually moved, maybe because i add current velocity (1m/s) in the solution.
I also got multiple error warnings:
1) Hydrodynamically interacting structures have move significantly from the analysis position result are inaccurate - movement exceeds 50%.
2) CABLE DYNAMICS- WARNING - SLACK CABLE #3: The minimum allowable tension for the line is 64200.0. The minimum calculated tension for this line is 52928.6 move attachments further apart or shorten line. The cable 3 here is the hawser (line connecting the ship to the buoy)
3) I also noticed that my hawser cable parabolic downward 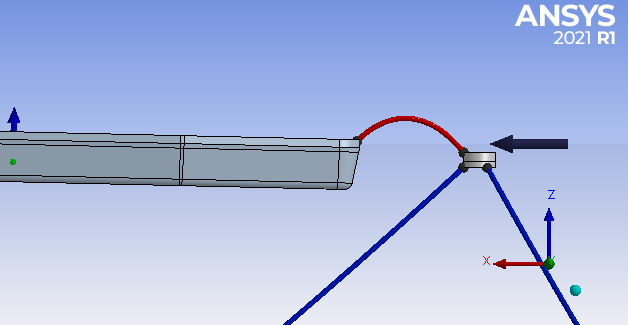
4) Mass/displaced mass significantly different for structure #2. difference = -19.5%. My structure 2 is the Ship.
Mass/displaced mass significantly different for structure #2. difference = -51.9%. My structure 1 is the buoy.
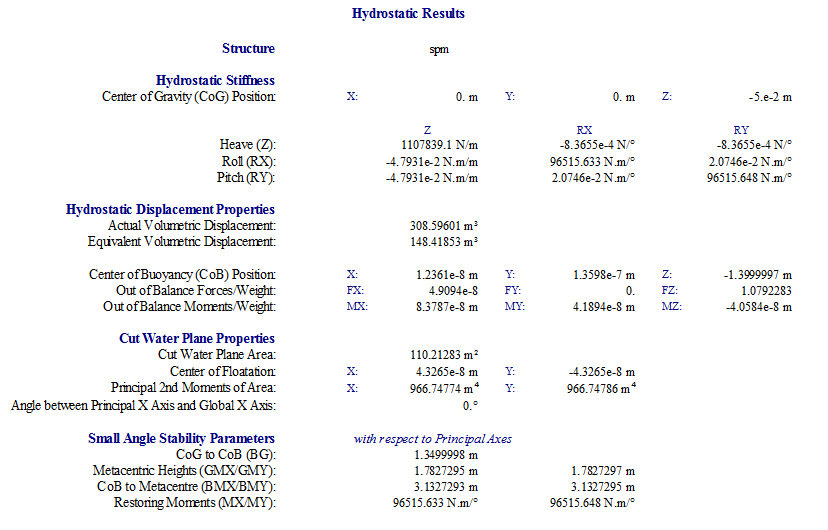
This is the hydrostatic results obtained from the buoy:
Thanks for any idea that will help me solve this problems.