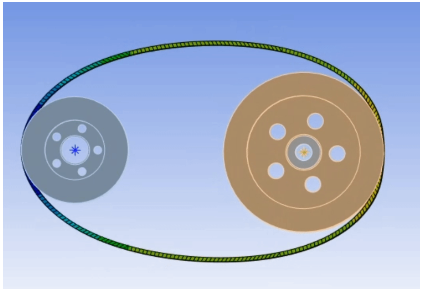
The moment is applied to the mobile pulley, and the acceleration is applied to the fixed (driving) pulley. This is so that more tension is created in the belt to ensure an accurate simulation of the flat belt operation. The driving pulley has something to turn against as soon as it rotates, simulating a real life resistance at first acceleration. That's the idea there.
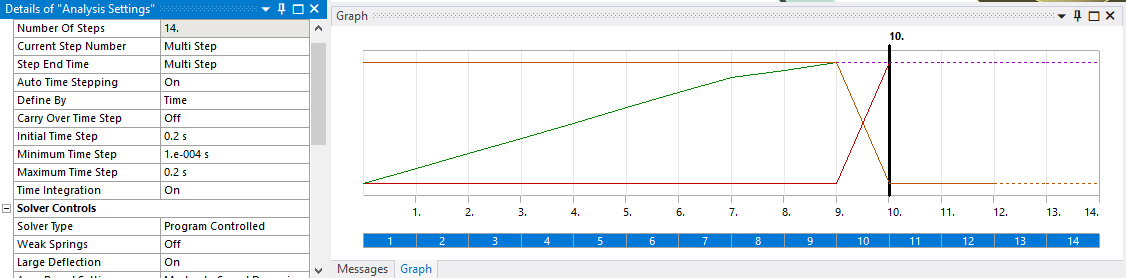
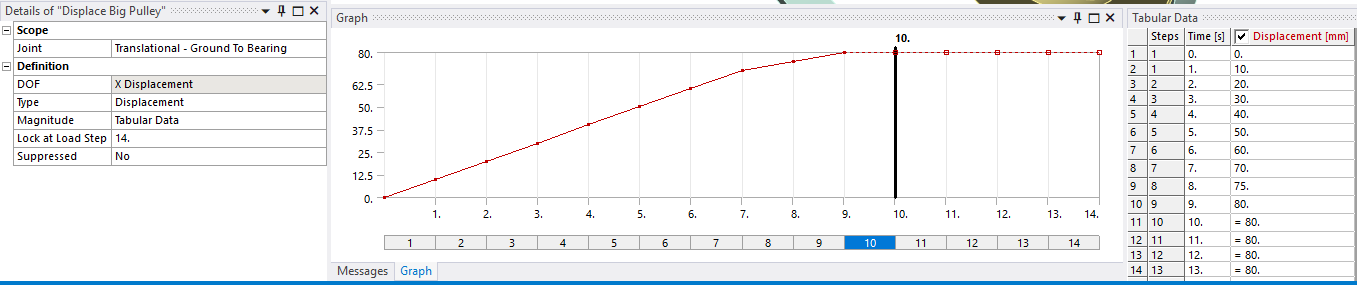
I'll try using less steps like you suggested, that might be one of the issues. The thing is, if the pulley displaces 75 mm (how far I want it to displace ultimately, 60 mm was just a trial), but only in the span of one or two seconds, I'm worried the simulation won't be able to handle a deflection that large in that short of time. Let me know if that's valid logic, but I'll try it out regardless.
Also, for "equally-spaced data points", the number that is chosen here depends on the number of total substeps, correct? I was told messing with this number can make the simulation much faster so that when I do play around with the different time step options, I won't be wasting too much time. Thanks