Hi everyone
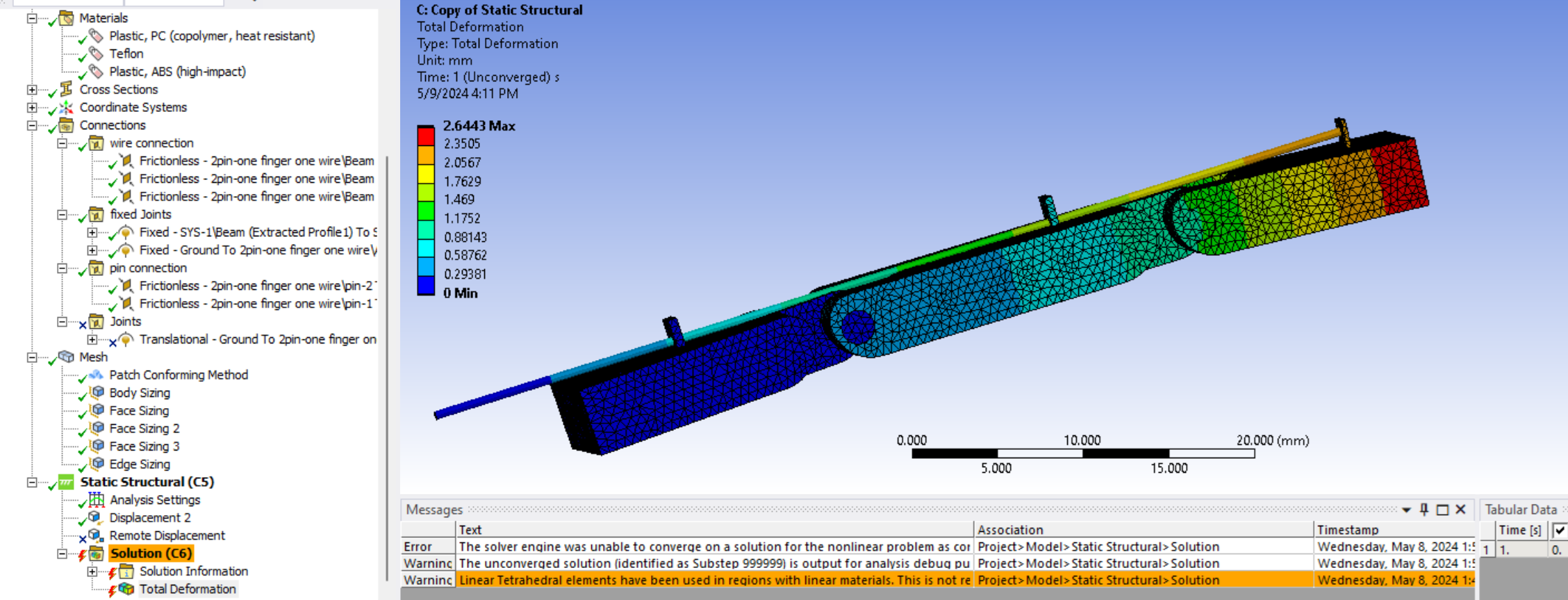
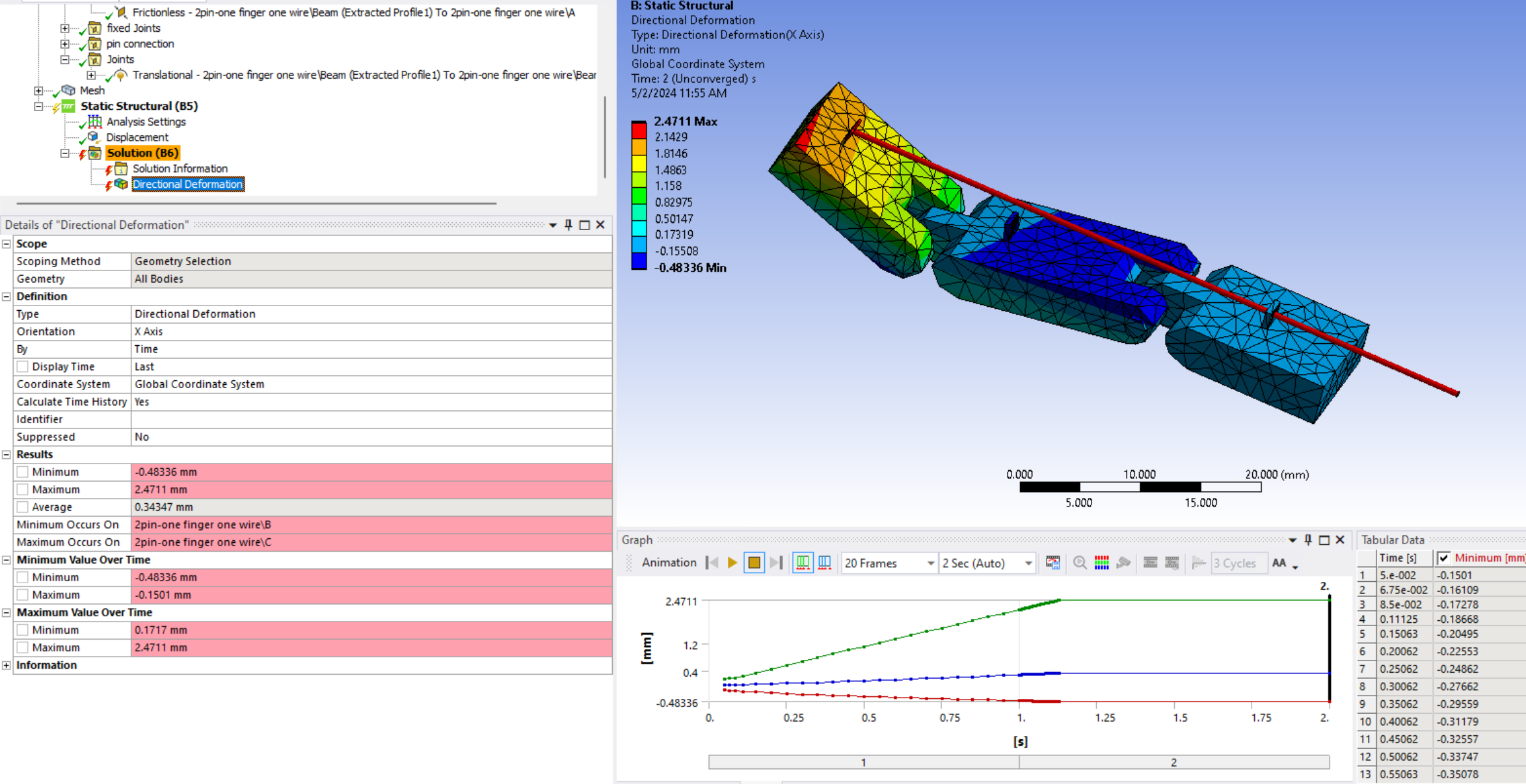
I want to simulate finger movement by using a tendon, and when I pull the tendon, it will make the finger bend. I tried to make the joint frictionless and the contact between the tendon and body frictional, but there was no movement. I used Ansys 2022R1.
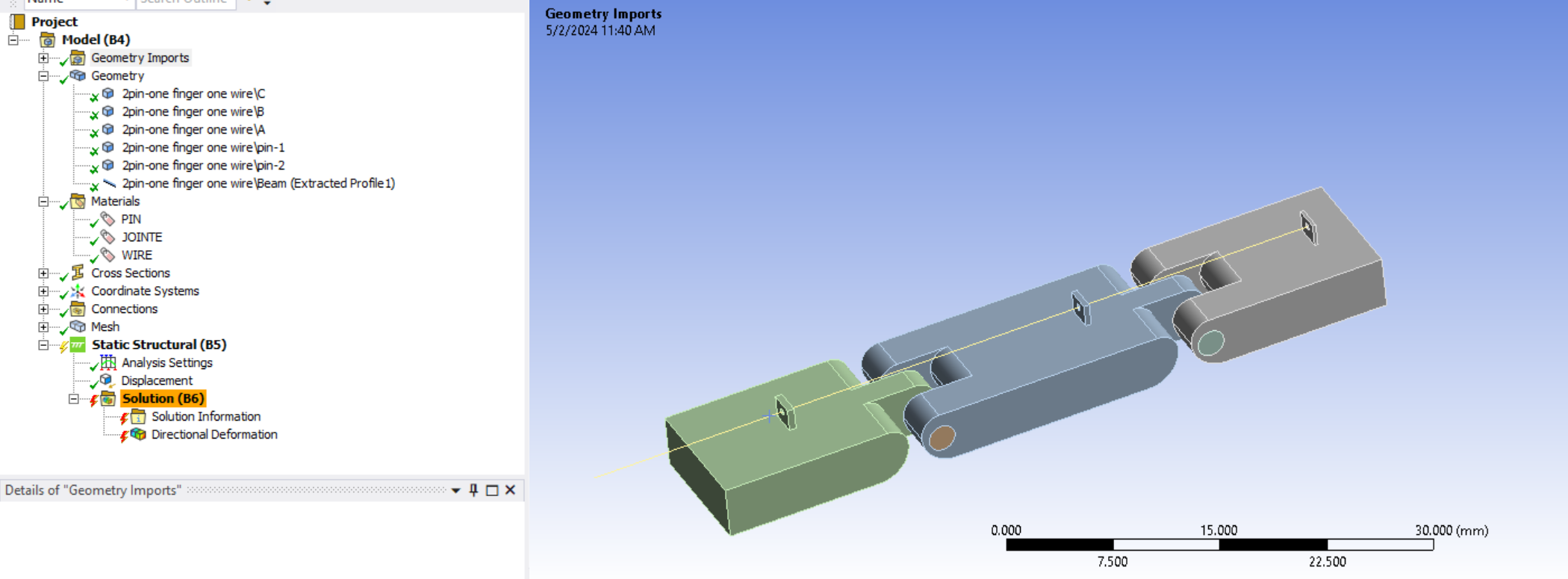
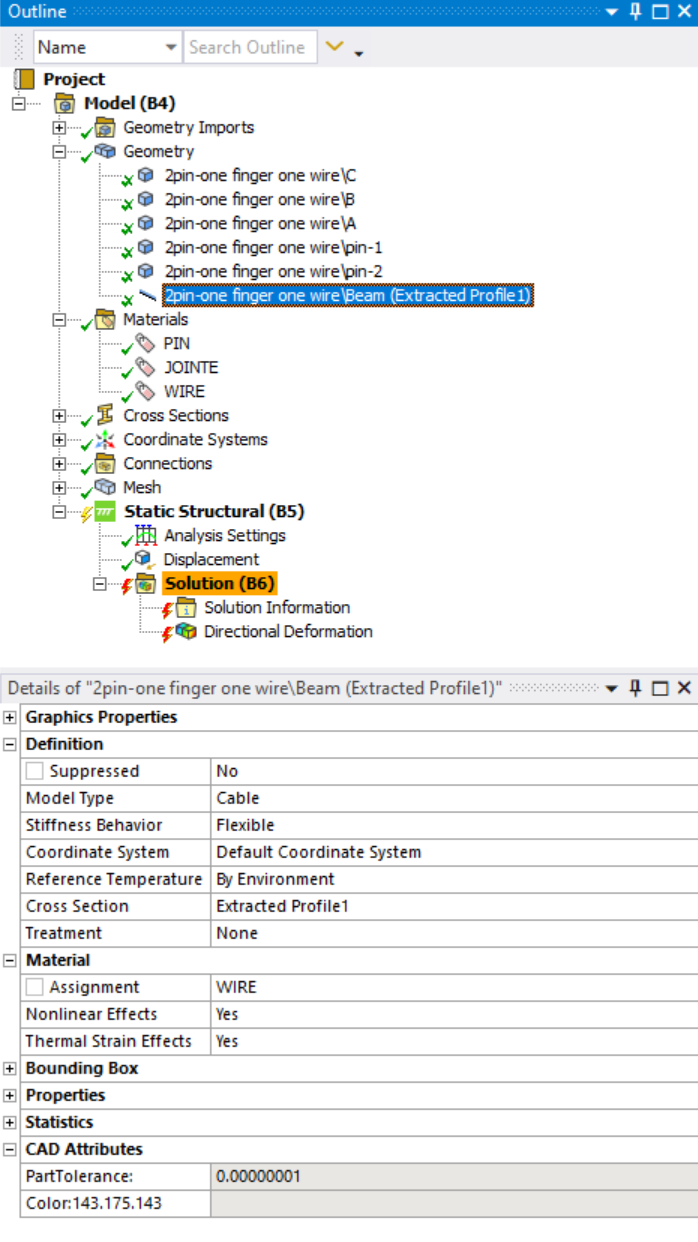
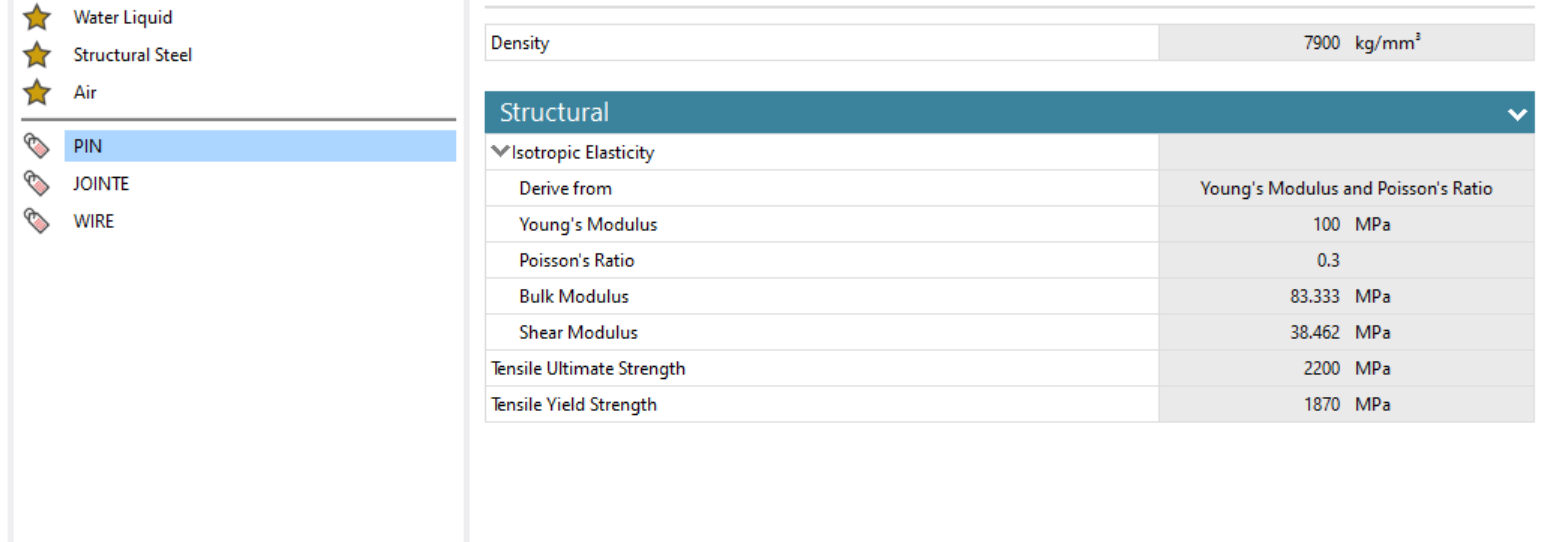
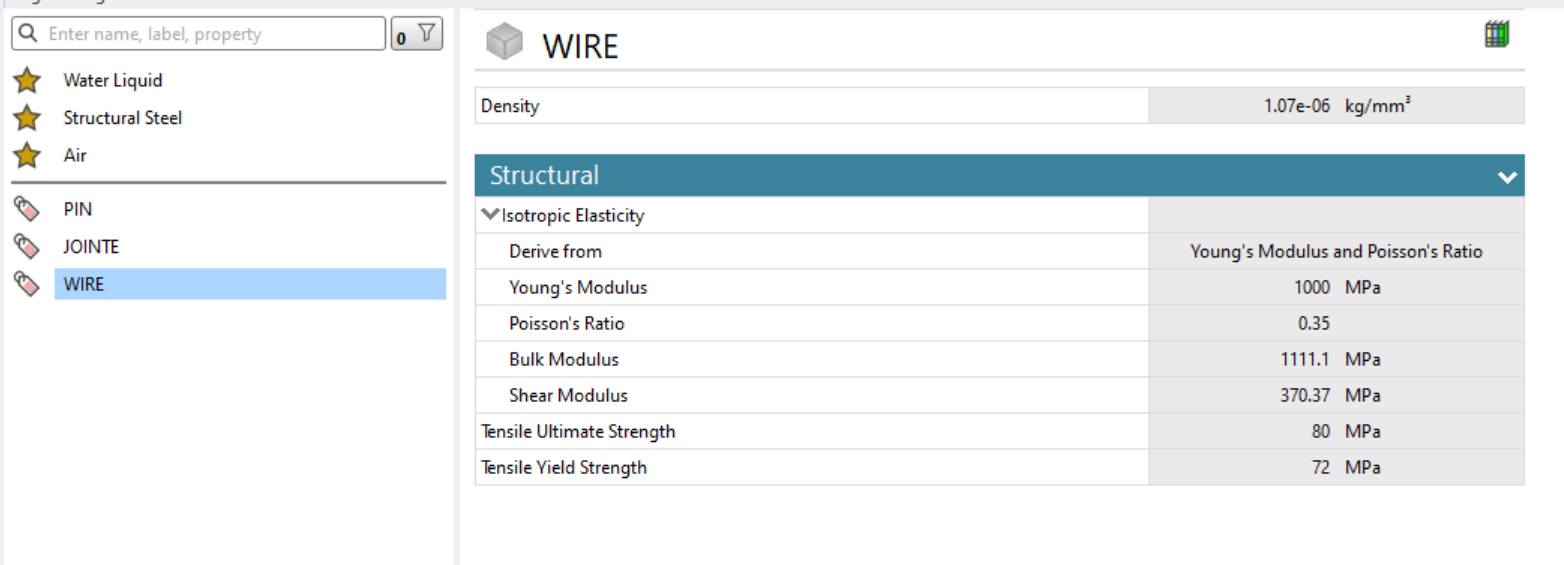
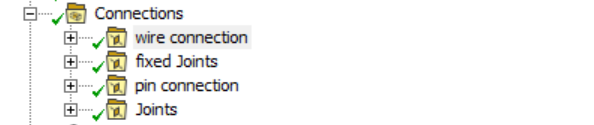
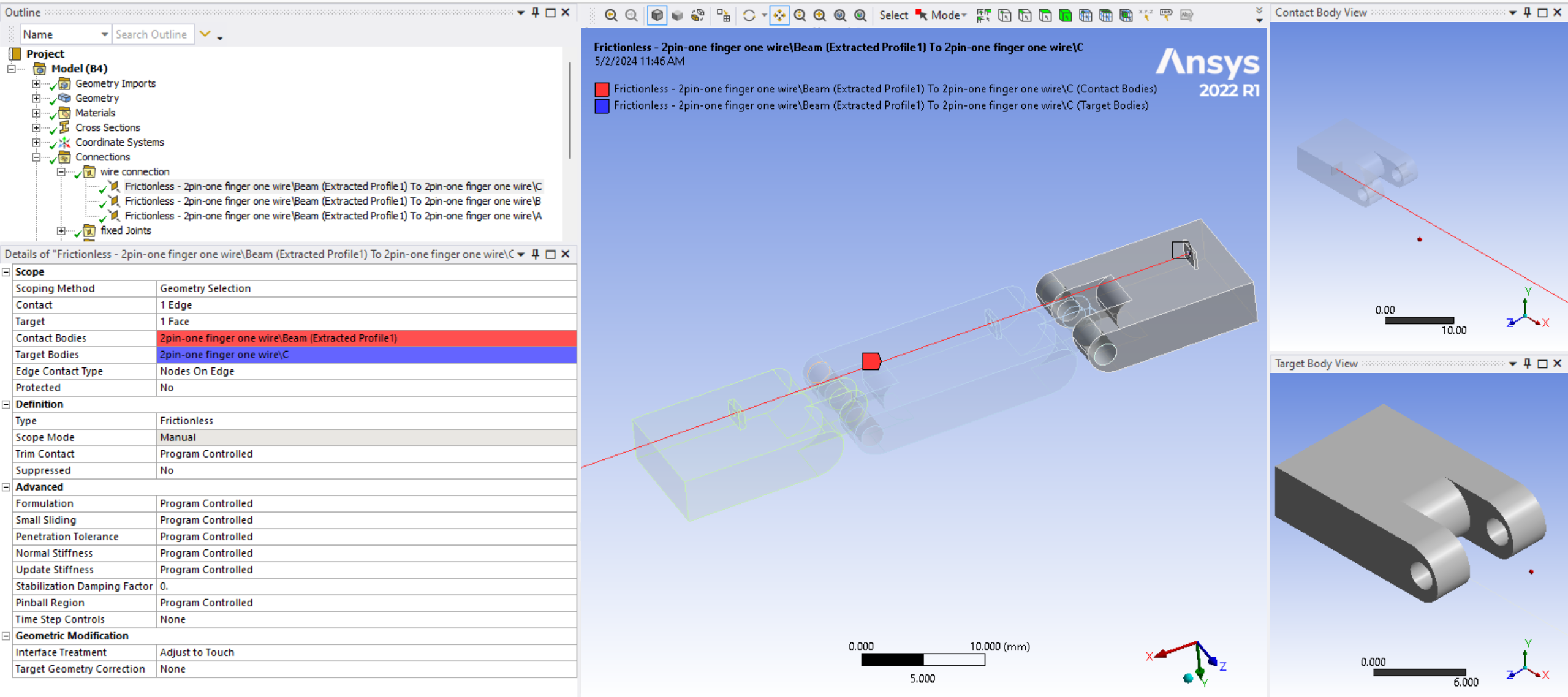
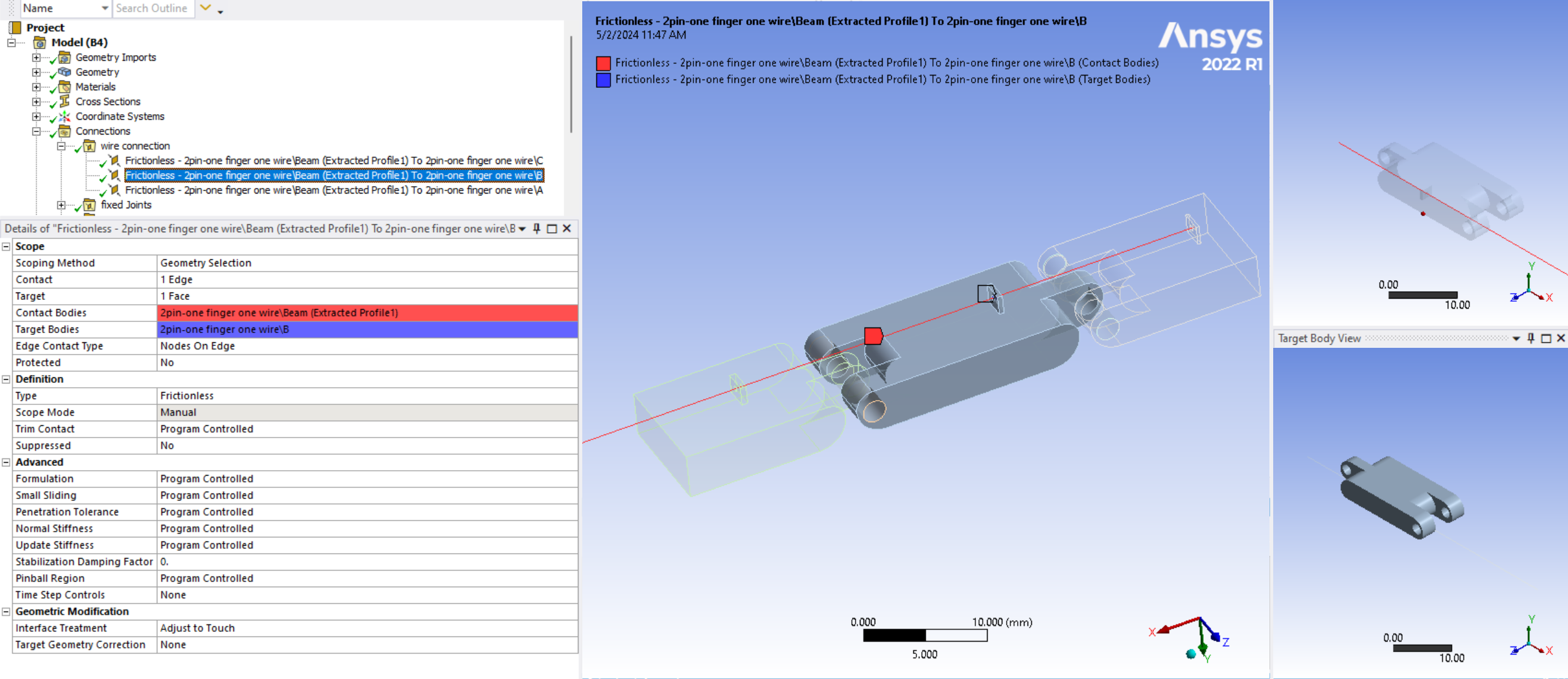
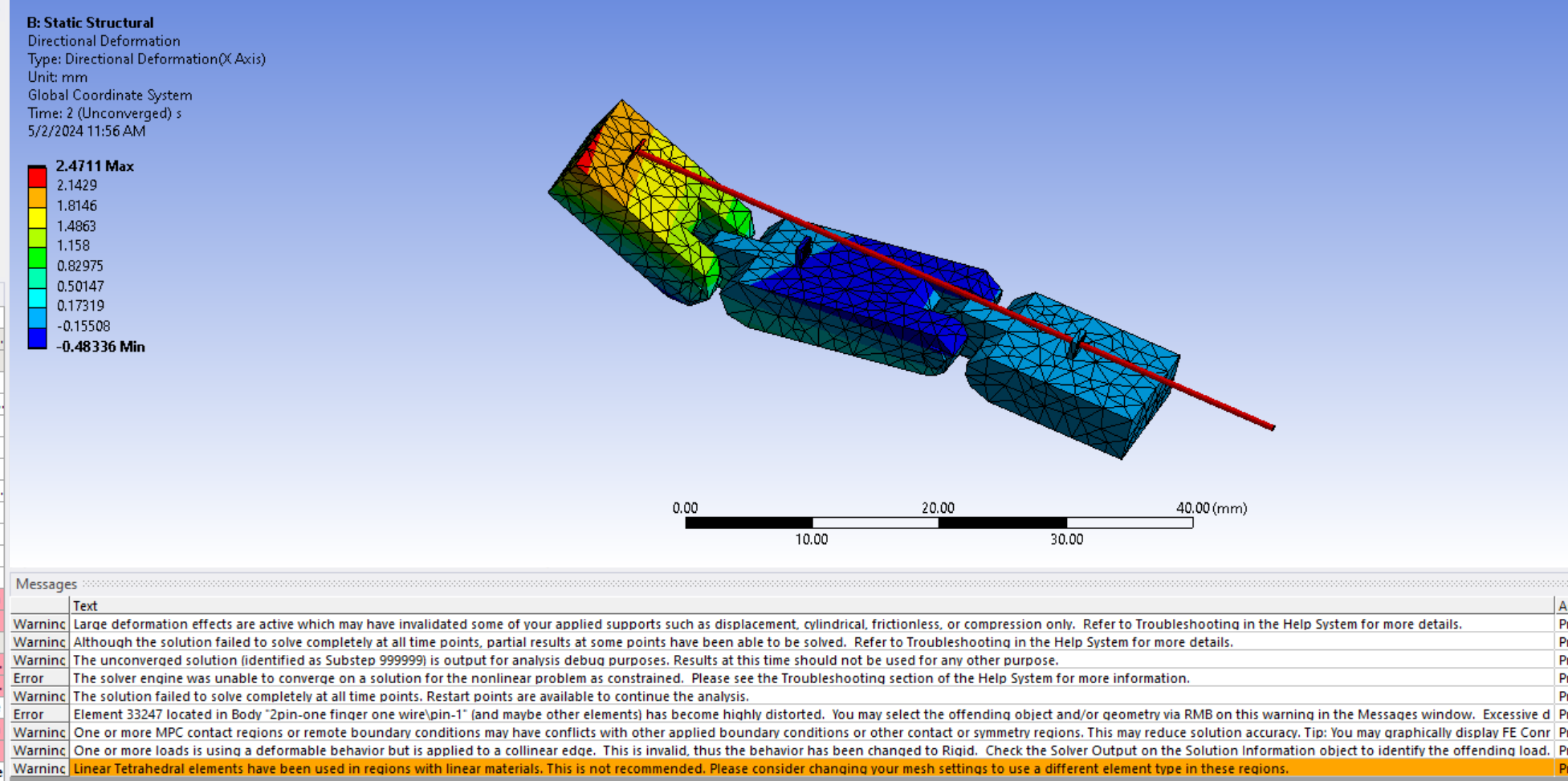
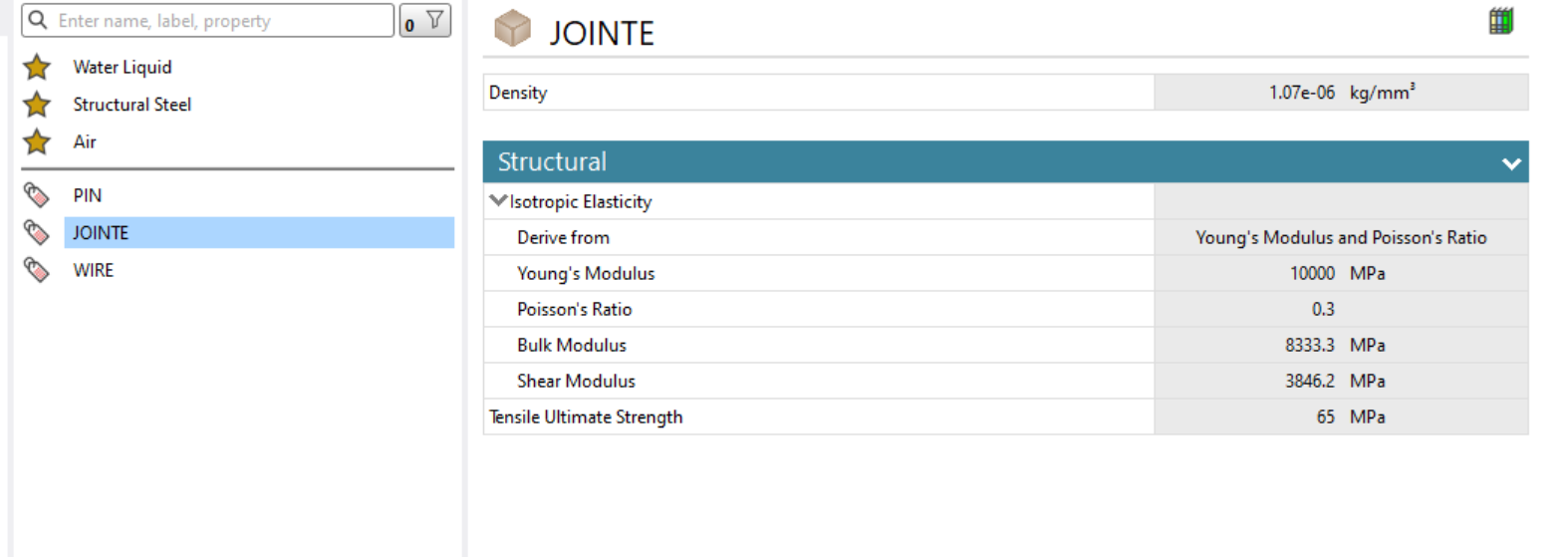
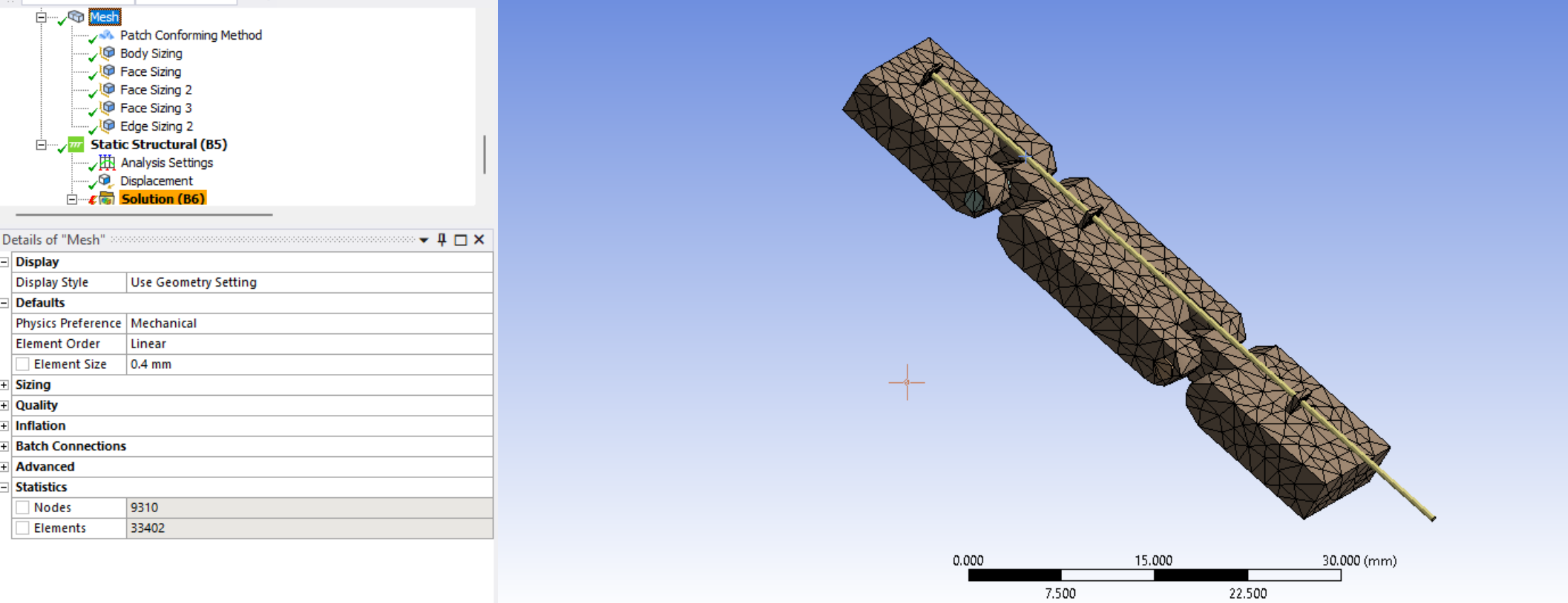
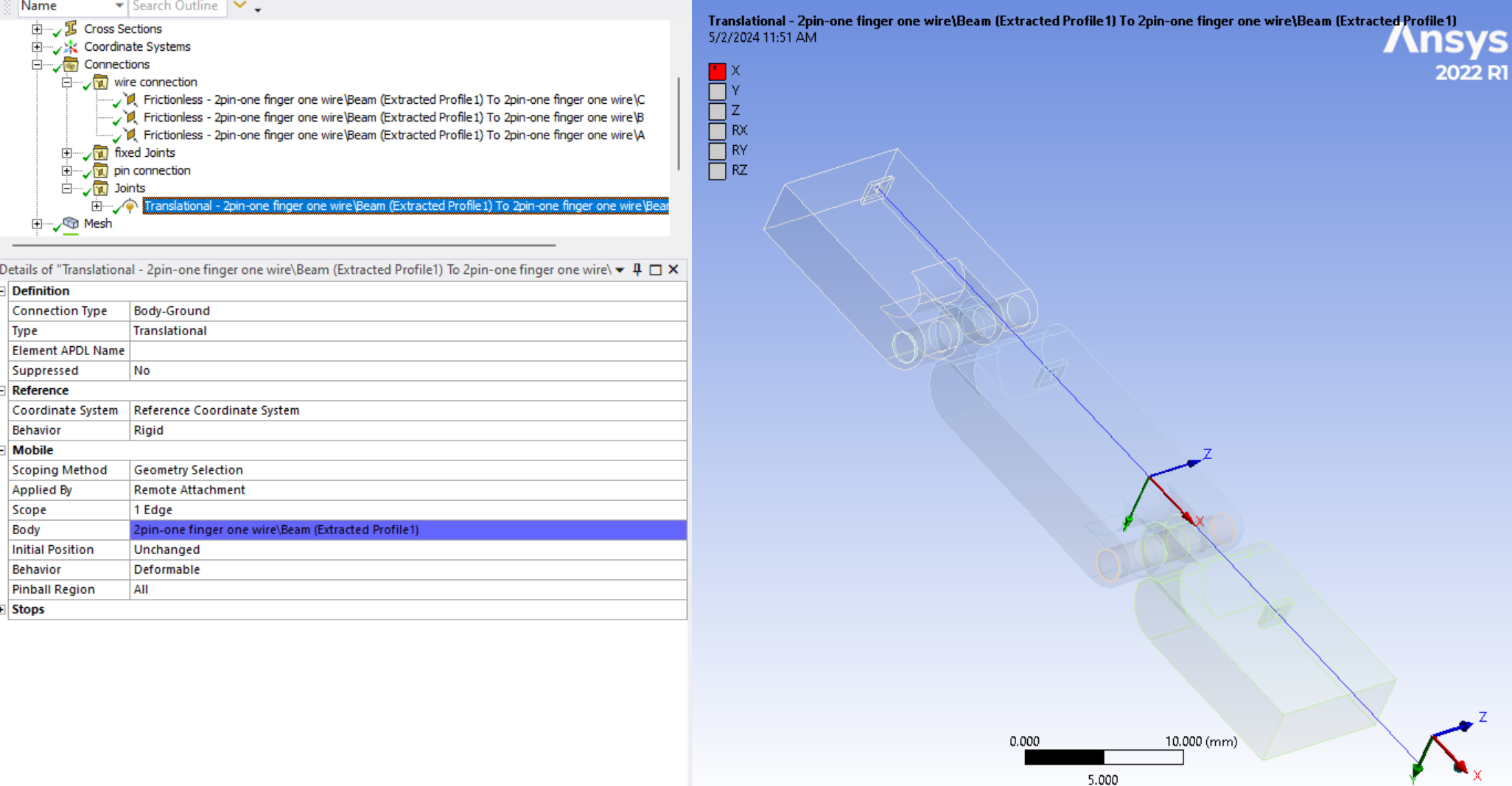
I tried to define the joint and contact between the tendon and finger to move the finger, as shown in the photo below: I used a beam line for the wire. All the pins are frictional, with a 0.07 coefficient of friction. I use static analysis with large deflection (on). Maybe the properties of the material are wrong. Why does the wire go out of the hole (the guide)? Why does the wire not bend and make the finger rotate? I tried with a rigid body but got no results.
I appreciate and thank you all for the help.