
TAGGED: contact, pinball-radius
-
-
January 4, 2022 at 8:26 pm
Rameez_ul_Haq
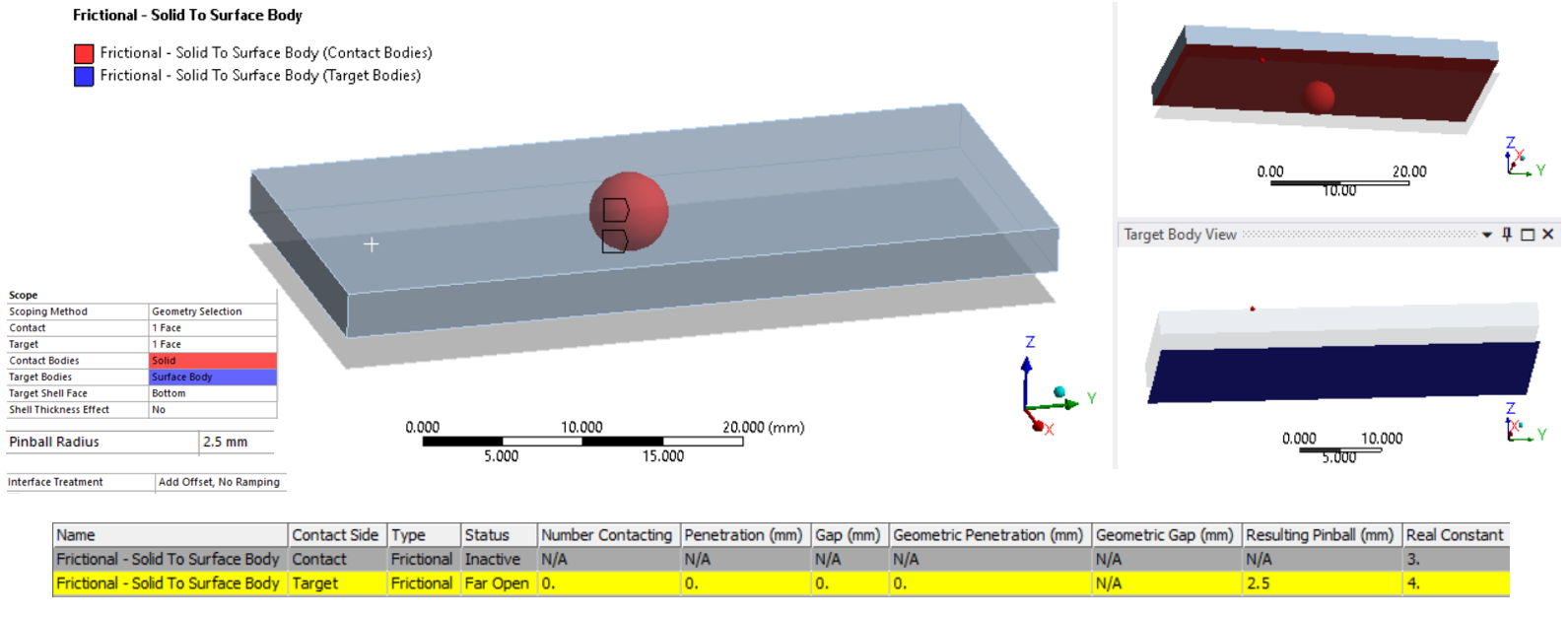
SubscriberThe surface body is given offset type of bottom, as shown the figure below. Gap between the surface body (marked in green) and bottom face of the solid body is 2.1 mm. I have given a thickness of 2 mm to the surface body.
January 4, 2022 at 8:52 pmSubscriber,in this discussion: /forum/discussion/19928/shell-thickness-effect#latest
You already mentioned that the "The Pinball radius should be higher than the actual distance between the midplanes of the surface bodies in contact.". You said this for surface bodies in contact which had an offset type set to middle. But this still makes me believe that the pinball radius here should be atleast bigger than the distance between the surface body and the bottom face of the solid body. However, when even I change it to 2.5 mm and set the contact shell face as BOTTOM, as I already mentioned, the contact still doesn't get detected. Would be really glad if you could shed some of your views on this one, please.
January 4, 2022 at 11:19 pmpeteroznewman
SubscriberPinball radius is measured from the nodes so if the nodes are 2.1 mm away from the solid body, you need a pinball radius larger than 2.1 mm, such as 2.5 mm.
A sheet body has two faces, the TOP and BOTTOM. For Frictional contact, you want the colored face (red or blue) facing the other face in the contact pair.
The colored face (red or blue) is the direction in which it is searching for the other face pair. So you choose TOP or BOTTOM as needed to get the colored face pointing toward the other face.
That is why, for this particular case, choosing TOP makes the red face point in the right direction and setting the Pinball Radius to 2.5 results in a Near Open, while choosing BOTTOM results in Far Open because the red face is looking in the wrong direction.
January 5, 2022 at 8:26 amSubscriber,simple and great explanation. Thank you.
So I shouldn't worry about the top or bottom that if the contact will get detected or not for a pinball radius of 2.5 mm, if I just go for the bottom face of the solid body as contact, right?January 5, 2022 at 12:55 pmSubscriberAll the faces on a solid body face outward, so there no need to help the contact algorithm look in the correct direction for the other face pair. Unlike a sheet body which has two sides on a single face, a solid block has two opposite faces for the two sides and you know which one to pick.
January 5, 2022 at 1:45 pmSubscriber,okay so the contact gets detected, but still if I pick the wrong face, the frictional contact will not work properly (as it is supposed to), right?
January 5, 2022 at 1:51 pmSubscriberYes, if you pick the wrong face, the frictional contact will not work the way you want it to.
January 5, 2022 at 5:32 pmSubscriber,well here is some bad news (according to my analysis). When solid body's bottom face is given contact and the surface body is given target (and we just agreed that it shouldn't matter if the Target Shell Face is set to TOP or BOTTOM, since the contact gets detected from nodes of contact face to nodes of surface body), the contact doesn't get detected (for the case shown below).
January 5, 2022 at 8:12 pmSubscriberYou haven't understood the rule. I repeat it here...
A sheet body has two faces: TOP and BOTTOM. For Frictional contact, you want the colored face (red or blue) facing the other face in the contact pair.
In your last post, you can tell at a glance that you have the wrong side of the sheet body in the contact pair because the blue face is facing away from the red face. You need to choose TOP to have the blue face facing the red face.
January 5, 2022 at 8:36 pmSubscriber,sir I know that is not what would happen in the reality. I know what I did in my previous comment was something which won't happen. But try to understand me, what I am trying to convey here, sir. I am just doing it for the sake of understanding it properly. You remember this thing I said So I shouldn't worry about the top or bottom that if the contact will get detected or not for a pinball radius of 2.5 mm, if I just go for the bottom face of the solid body as contact, right?
I was talking about the top or bottom for the surface body. I wasn't talking about the solid body's top and bottom, because it doesn't exist. We just have one face for solid body, so it doesn't make any sense to have top and bottom. So I thought what you said is that since the contact gets detected from node to node, and since the contact face is now solid body's bottom face, it only has one way to go (i.e. away from it). Now, the nodes on the surface body (target) lie 2.1 mm away. So I think it shouldn't matter if I choose Top or Bottom because the contact is not being detected in any direction from the target at all. It is being detected from the contact face (bottom face of the solid body), so it doesn't matter whether I go for Top or Bottom for Target surface body.
I hope I was able to convey my thoughts properly now.
January 5, 2022 at 9:42 pmSubscriberIt doesn't matter if you flip Contact and Target back and forth between the solid and the sheet body. The rule remains. The red and the blue faces must point toward each other for the contact to be seen as closed or near open if the pinball radius is large enough.
If you flip the TOP and BOTTOM side on the sheet body, one choice will point a red or blue face to the solid body face and that contact will work, while the opposite will be Far Open. You can tell just by looking at the red and blue faces when it is going to work and when it will not.
When you have frictional contact and one or both sides are sheet bodies, the red and the blue faces must point toward each other for the contact to be seen as closed or near open.
January 6, 2022 at 9:50 amSubscriber,regarding your first paragraph, this is exactly what confuses me. I mean isn't this true that the contact gets detected from each of the node on the contact face? Check out this thread (/forum/discussion/comment/96574) where you wrote that, "A frictional contact has a Contact face and a Target face. The pinball is used on every node of the Contact face. On a particular node, if the pinball reaches the Target face, a contact element is created. On another node, if the pinball does not reach the Target face, no contact element is created.".
Now if it gets detected from each node on the contact face, then why should that be a problem if I am choosing the wrong Target Shell Face? I mean if the bottom face of the solid body is given contact, and we know that it only has one layer of nodes on the face which is chosen as contact (and contact will start getting detected away from that layer of nodes, to find any target face or nodes on target face), then it shouldn't matter whatever Target Shell Face I go for (either TOP or BOTTOM). Because the Target nodes still lie 2.1 mm away from the contact nodes, and if I use 2.5 mm as pinball radius, then it should get detected (irrespective of what Target Shell Face is chosen). I don't think I am the only one who has raised this question, maybe you might have also thought about it before.
I know that if I choose shell body as the contact, then choice of the correct Contact Shell Face becomes important since it decides in which direction should the contact nodes now start detecting any target face or nodes on target face. But this is not what I am doing. I am putting the contact face on the bottom face of the solid body, and keeping the shell body as target.
In regards of what you said in your 2nd and 3rd paragraph, thankyou for telling me this again. I will always keep this in mind. But it wouldn't be mentally satisfying to use it, without getting any reason or answer for the query I have emphasized on, above.
January 6, 2022 at 1:43 pmSubscriberSeparate the creation of contact elements before solving begins from the contact algorithm using them while solving.
The pinball radius is used to decide whether to create a contact element or not, using a very simple algorithm; can it reach a target element in any direction. The search algorithm for creating elements is from a node to a target face, without regard to the outward normal of the face the node is on.
While solving, the outward normal of the contact pairs matters because it has to now measure a gap or interference and apply forces as needed to operate the frictional contact.
If the two faces are pointing toward each other, then it can measure the gap or interference. If one of the faces flips by you choosing the wrong face Top vs. Bottom, then no gap/interference can be measured.
January 7, 2022 at 1:49 pmSubscriber,in regards to what you said in the last and second last paragraph, it appeals as choosing the wrong Shell face for non-linear contact will ruin the solution. I agree. So basically, for example, if the penetration tolerance is set to 0.5 mm by the solver, and if I choose the wrong shell face in the contact definition for this current example, then the frictional contact might work or might not work. Even if it works, it won't represent the reality closely since it has already surpassed the top most face of the surface body and is searching for convergence (by using 0.5 mm as max penetration tolerance) on the wrong shell face of the surface body. Whereas it needs to start searching for the convergence on the top most face of the surface body. This means that I might have high penetration through the surface body, which is not practically logical. Would be glad if you could affirm.
Secondly, I would just keep this in mind that the two faces in contact should be pointing toward each other. For solution accuracy or convergence point of view, it makes sense why. But from Pinball radius detection point of view, it still doesn't (atleast for me).
January 7, 2022 at 4:09 pmSubscriberIf you pick the wrong shell face, frictional contact will not work. I don't think penetration tolerance has anything to do with the issue. You imagine that once the shell has passed through the solid surface, it will now be looking at the target face. I don't think it will. You can do an experiment and see what happens.
Think of the red and blue faces of the frictional contact pair as mirrors with a red or blue sticker on the mirror side. If the mirrors are facing each other, each sticker can see the other. If you flip one mirror (change Top to Bottom for example), now both mirror cannot see the other sticker. If you move the flipped mirror to the opposite side of the mirror on the solid, penetrating the solid, the shell mirror can only see the back side of the solid mirror. Both mirrors still can't see the other sticker.
January 7, 2022 at 4:27 pmSubscriber,what you said in last paragraph, its amusing and fascinating that the ANSYS has this implemented within its alogrithm. I was thinking that distance is the same between the nodes of contact to nodes of target, so frictional contact should get detected no matter what the Shell face is being used (TOP or BOTTOM). But the contact and target faces must face each other otherwise the contact will not get detected, thats very impressive by ANSYS. It implies that ANSYS has extremely sophisticated codes and algorithm implemented within it, because what I was saying was simple. ANSYS could had just done that, but they modified the code such that the contact will not at all be tracked if the target and contact faces are chosen so that they not facing each other. They didn't leave any room for the Analyst Engineer to make any mistake by choosing the wrong face and conduct the analysis (since the contact will not at all be tracked) because the results would be wrong, and Analyst might not even bat an eye on it . IMPRESSIVE.
I wonder how does the ANSYS get to know if the faces are actually facing each other or not, I couldn't think of any way. I mean its code. Maybe surface normal, maybe something else, don't know.
January 7, 2022 at 4:32 pmSubscriberI wrote about looking at the red and blue faces in a frictional contact pair in this link.
/forum/discussion/21894/large-deflection-on-non-linearity-vs-frictional-frictionless-support-or-contact-non-linearity
In that discussion, there were two sheet bodies, which means you have 4 configurations, because there are two sheets and each one can be set to Top or Bottom. Only 1 configuration works.
January 7, 2022 at 4:39 pmSubscriber,let me check out the link. I hope I find out the answer to my question. Thank you sir, for having such a detailed conversation :)
Viewing 17 reply threads- The topic ‘Surface body to Solid body contact; how big should be the pinball radius?’ is closed to new replies.
Innovation Space Trending discussions
Trending discussions Top Contributors
Top Contributors
-
peteroznewman
 5819
5819 -
scabo
 1906
1906 -
Dennis Chen
 1420
1420 -
javat33489
 1305
1305 -
Shyam Prasad V Atri
1021
Top Rated Tags
© 2026 Copyright ANSYS, Inc. All rights reserved.
Ansys does not support the usage of unauthorized Ansys software. Please visit www.ansys.com to obtain an official distribution.
-






The Ansys Learning Forum is a public forum. You are prohibited from providing (i) information that is confidential to You, your employer, or any third party, (ii) Personal Data or individually identifiable health information, (iii) any information that is U.S. Government Classified, Controlled Unclassified Information, International Traffic in Arms Regulators (ITAR) or Export Administration Regulators (EAR) controlled or otherwise have been determined by the United States Government or by a foreign government to require protection against unauthorized disclosure for reasons of national security, or (iv) topics or information restricted by the People's Republic of China data protection and privacy laws.
