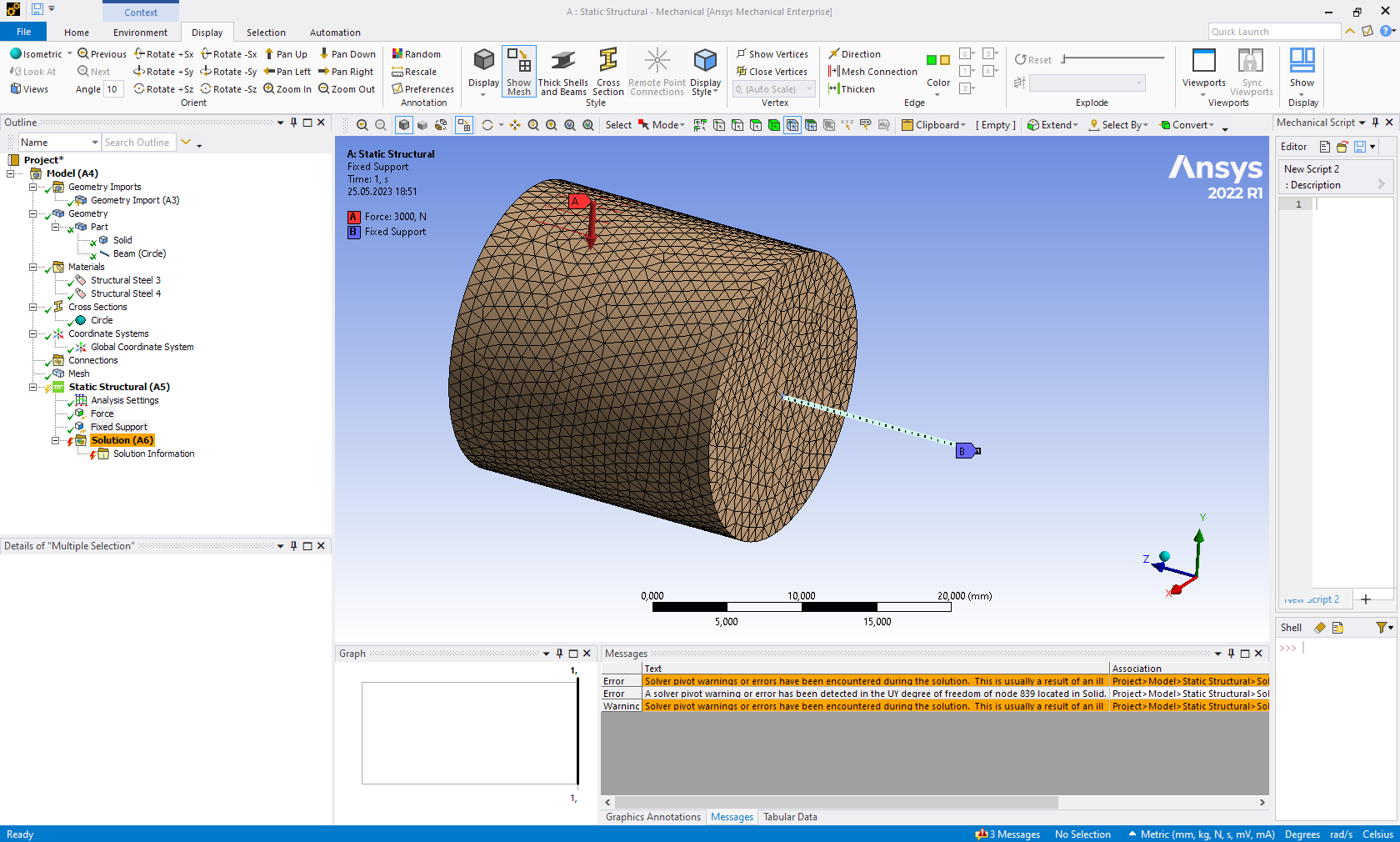
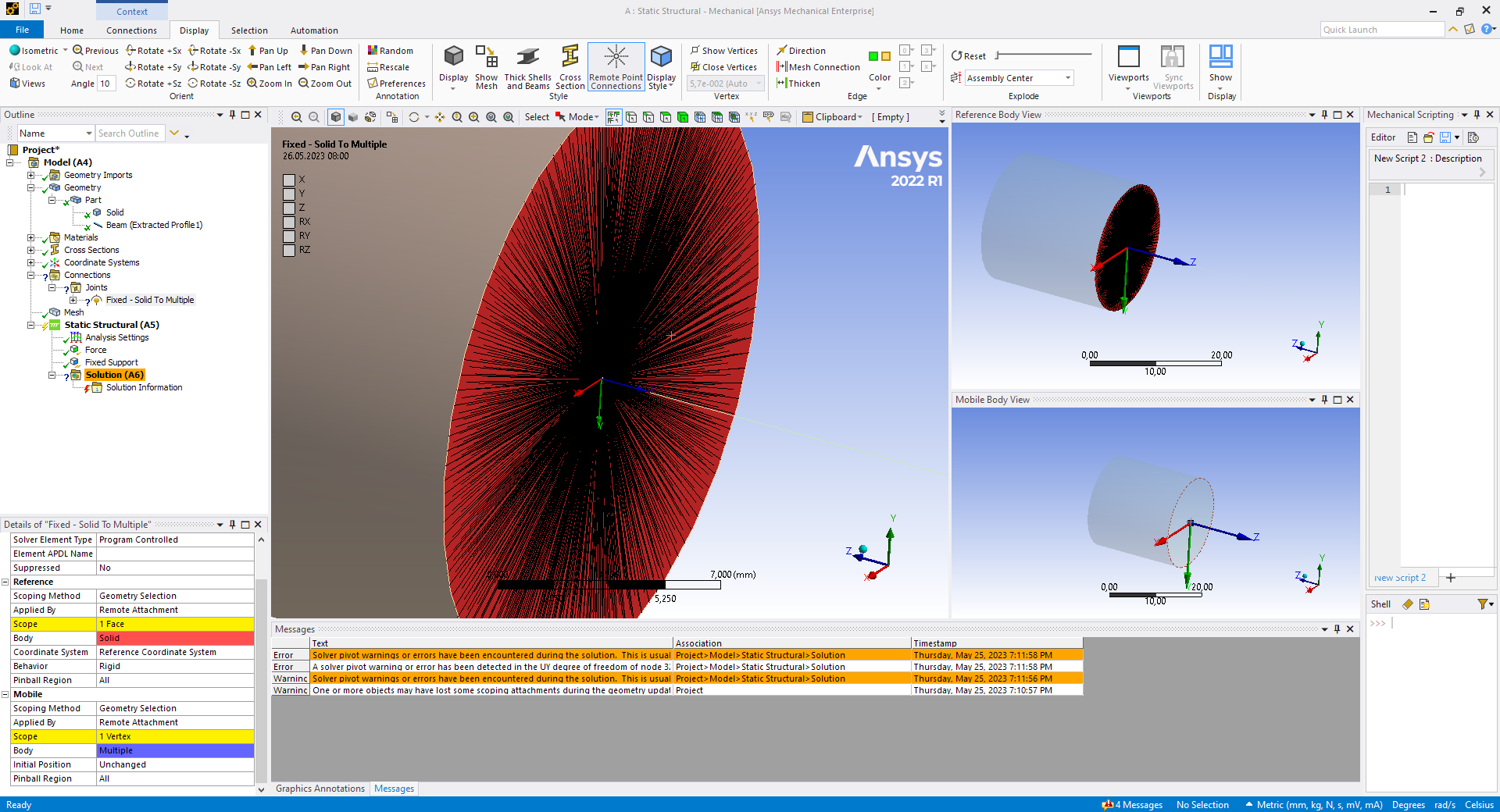
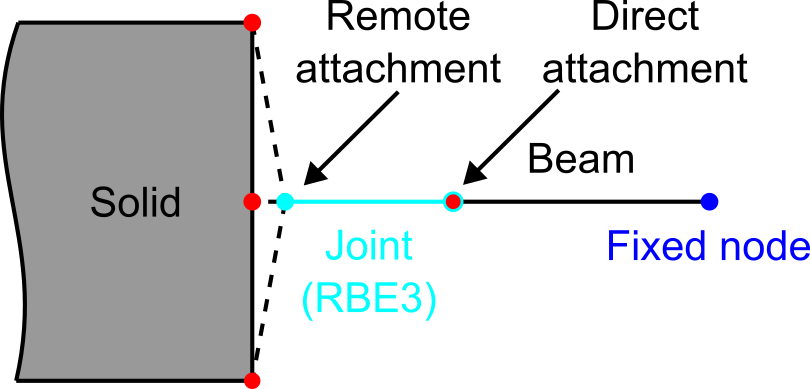
Yes kramer, go back to SpaceClaim and Unshare the geometry. The Joint needs a node at the vertex of the line body that is not shared with a node on the face of the solid.
Shared Topology works between beam and shell elements. It seems confusing why a beam and a solid element doesn’t work, so I will try to explain.
Nodes on beam and shell elements have 6 unknowns (x, y, x, Rx, Ry, Rz), three displacements and three rotations.
Nodes on solid elements have only 3 unknowns (x, y, z), three displacements. That means when a single node on a beam element is shared with solid elements, the beam behaves as if there is a spherical joint at that node because there is no rotational unknown on the solid elements to support rotational loads.
The same problem happens when a straight line at the edge of a surface is shared with a solid: a hinge would be created.