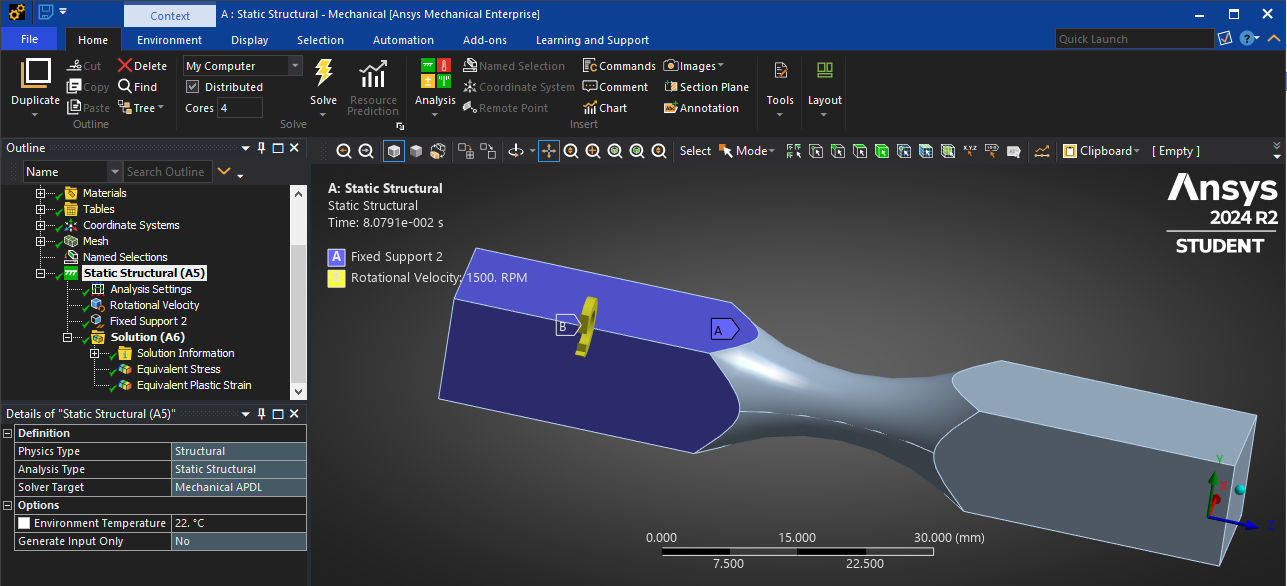
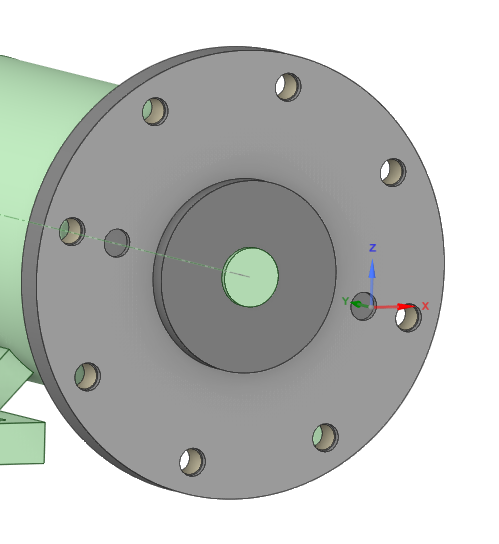
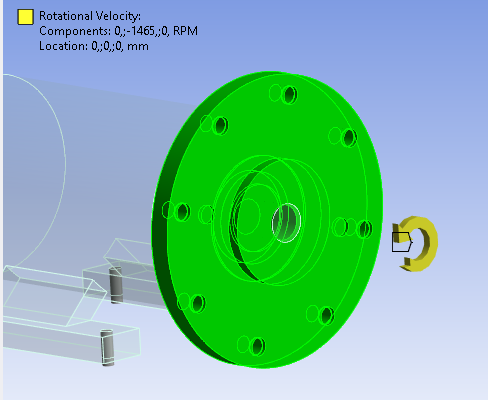
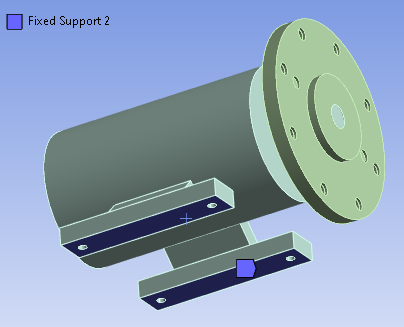
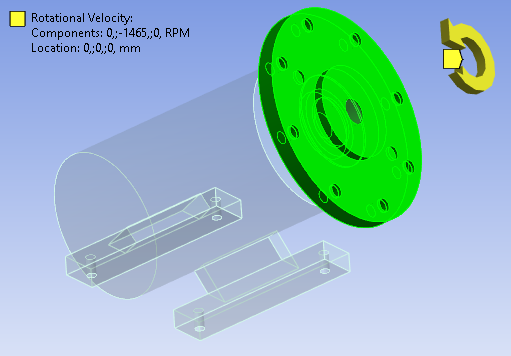
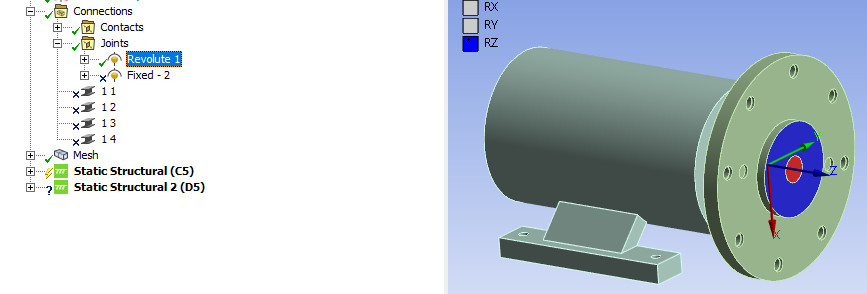
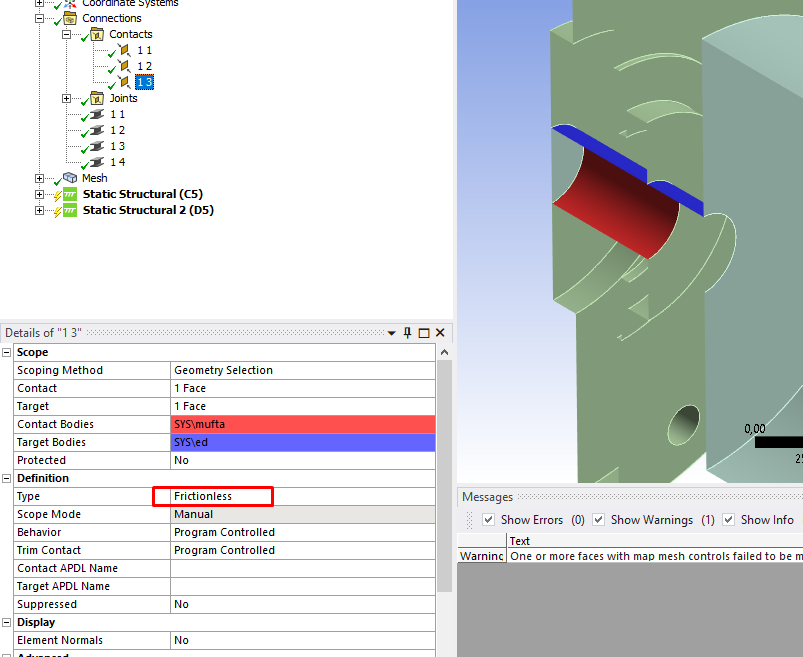
Sir, and if I apply torque to the inner diameter of the wheel, for example, I wrote earlier that I use a revolution so that the wheel does not move from its place, if I use this joint to rotate using torque, instead of rotation velocity, then I cannot get the result, the wheel swells greatly and an error occurs.
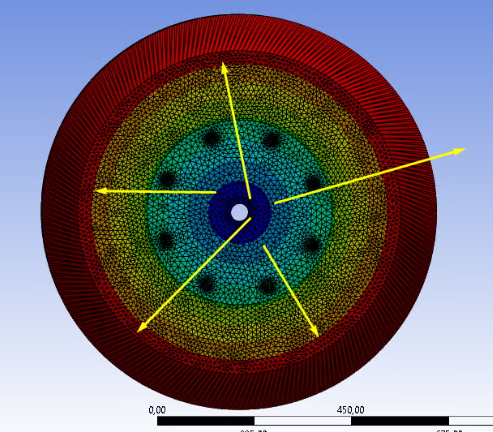
Previously, I applied 1500 RPM, and if I apply torque, this is 95,000 Nmm according to my engine data.
The question is, are these tools interchangeable, joint-torque and rotation velocity?
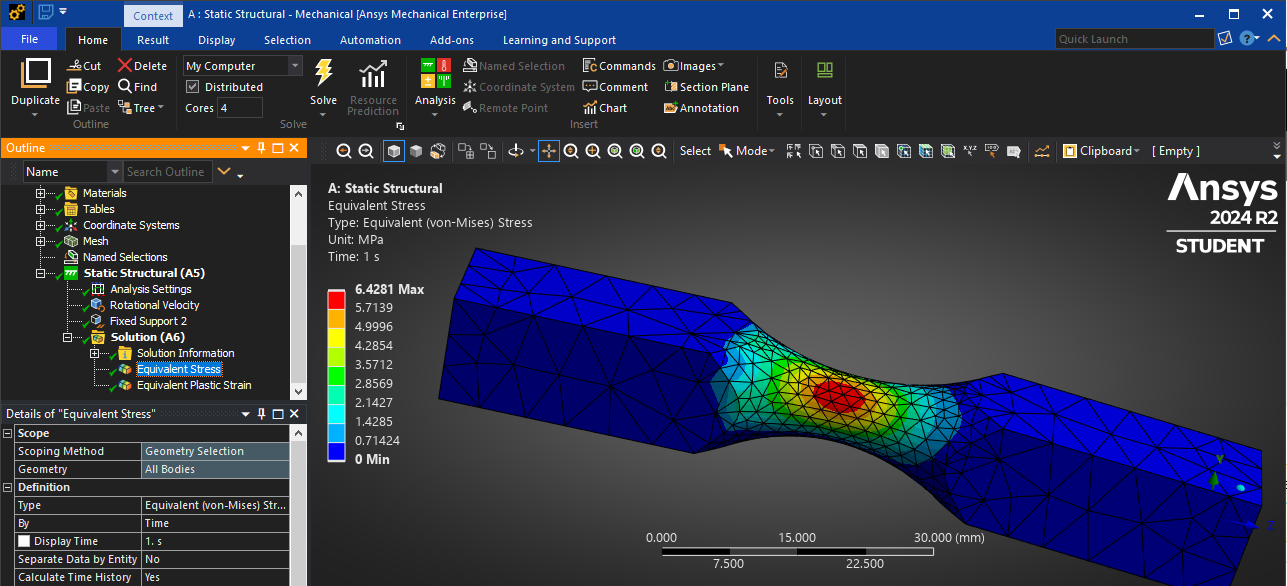
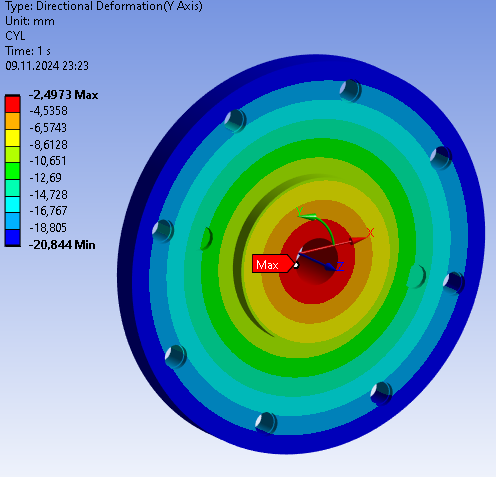
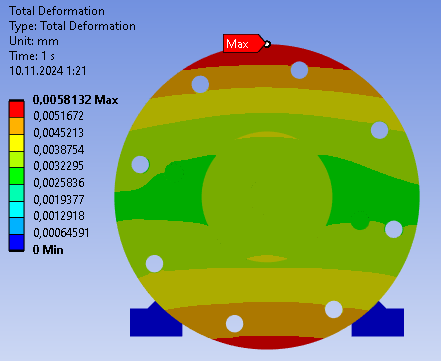
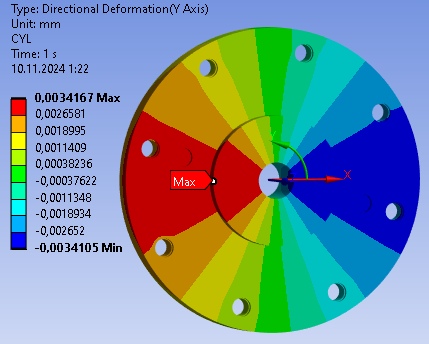
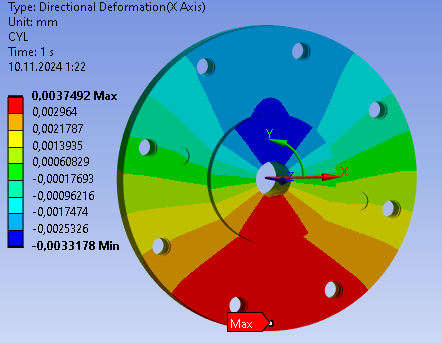
And why does the wheel swell so much with torque? despite a good grid, large movements and many steps.