Hello Peter,
Thank you for your answer.
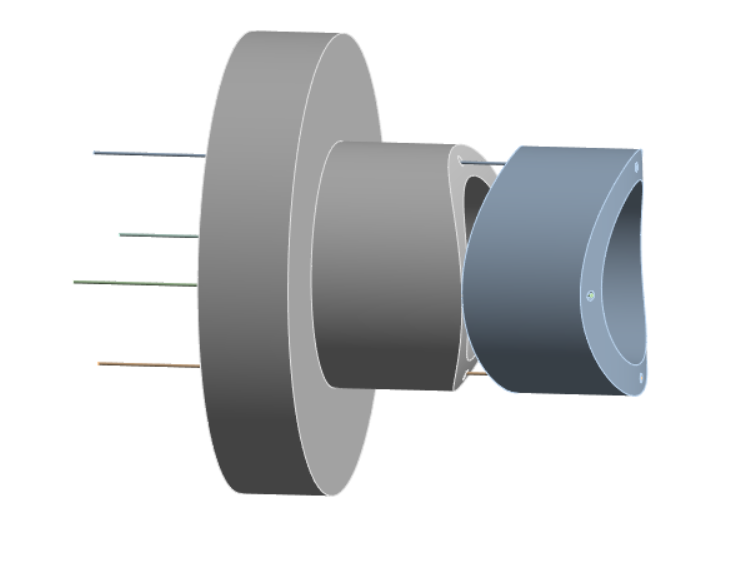
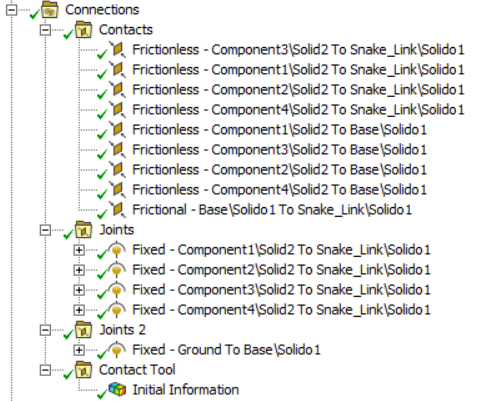
In the past few weeks I did a model with rigid links and flexible wires modeled with solid elements, now my idea is to set the links to flexible in order to analyze the interaction between the wire and the hole (I couldn't find a way to have these informations with the rigid links model).
We need this analysis because the links should be 3D printed (we chose sla technology to have almost isotropic parts that are easily simulated by ansys) and we want to check if the material used is good for our purposes.
After your answer I did the same model with cable280 elememts for the wires.
I attach both of them if you want to have a look (Ansys 2022R2).
https://drive.google.com/file/d/1-Kf8_E6p4oUQx2cawoYvy9x_a3x6yX_l/view?usp=sharing
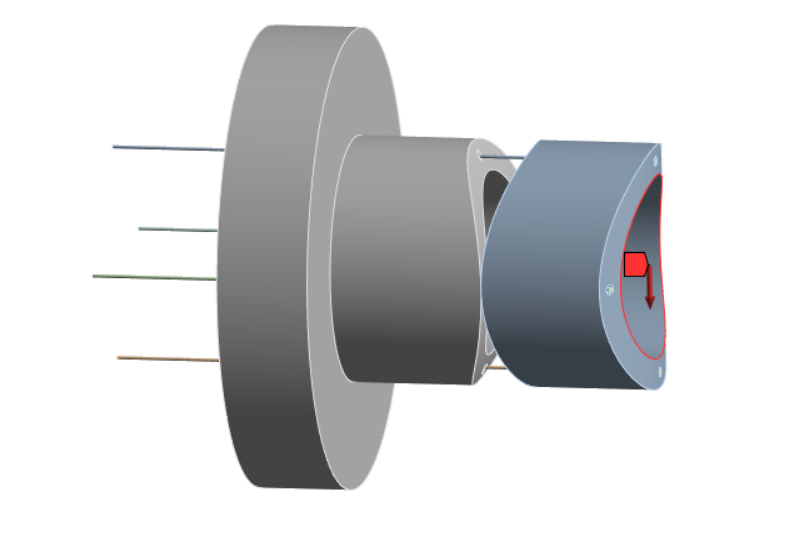
The next step would be to set a remote force to simulate the presence of the other 4 links and manipulate the wires in order to analyse the contact interactions link-link and link-wire.
Any suggestions are much appreciated as always.