Hi there,
I am currently working on a self-expansion simulation of a vascular stent and following these steps:
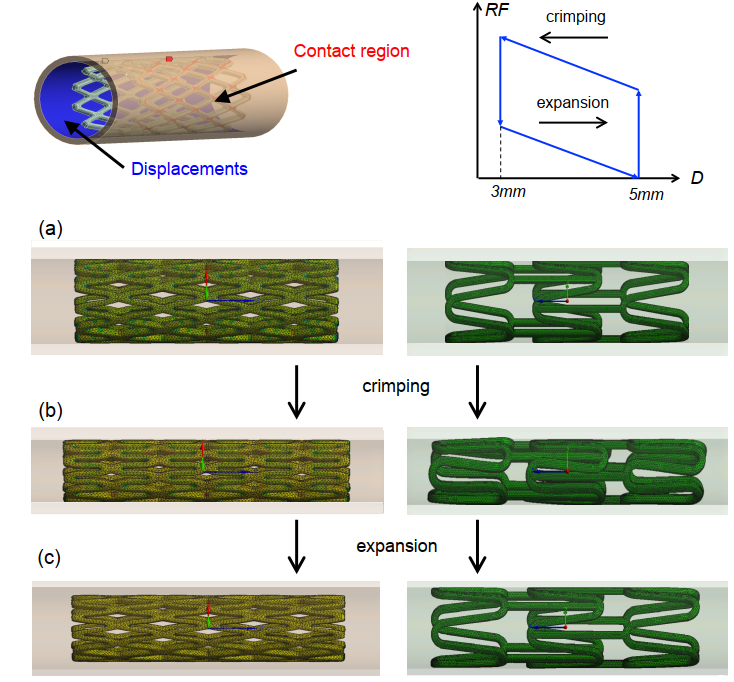
In this simulation, a crimper compresses the tubular stent into a smaller diameter. Upon releasing the crimper, the stent is expected to regain its initial diameter. The boundary condition applied is as follows:
- The crimping head is modeled as a rigid cylinder with its internal diameter matching the external diameter of the stent.
- Radial compression is applied as a boundary condition, with the compression driving the stent’s diameter from 5 mm (initial value) down to 3 mm and returning to 5 mm upon release.
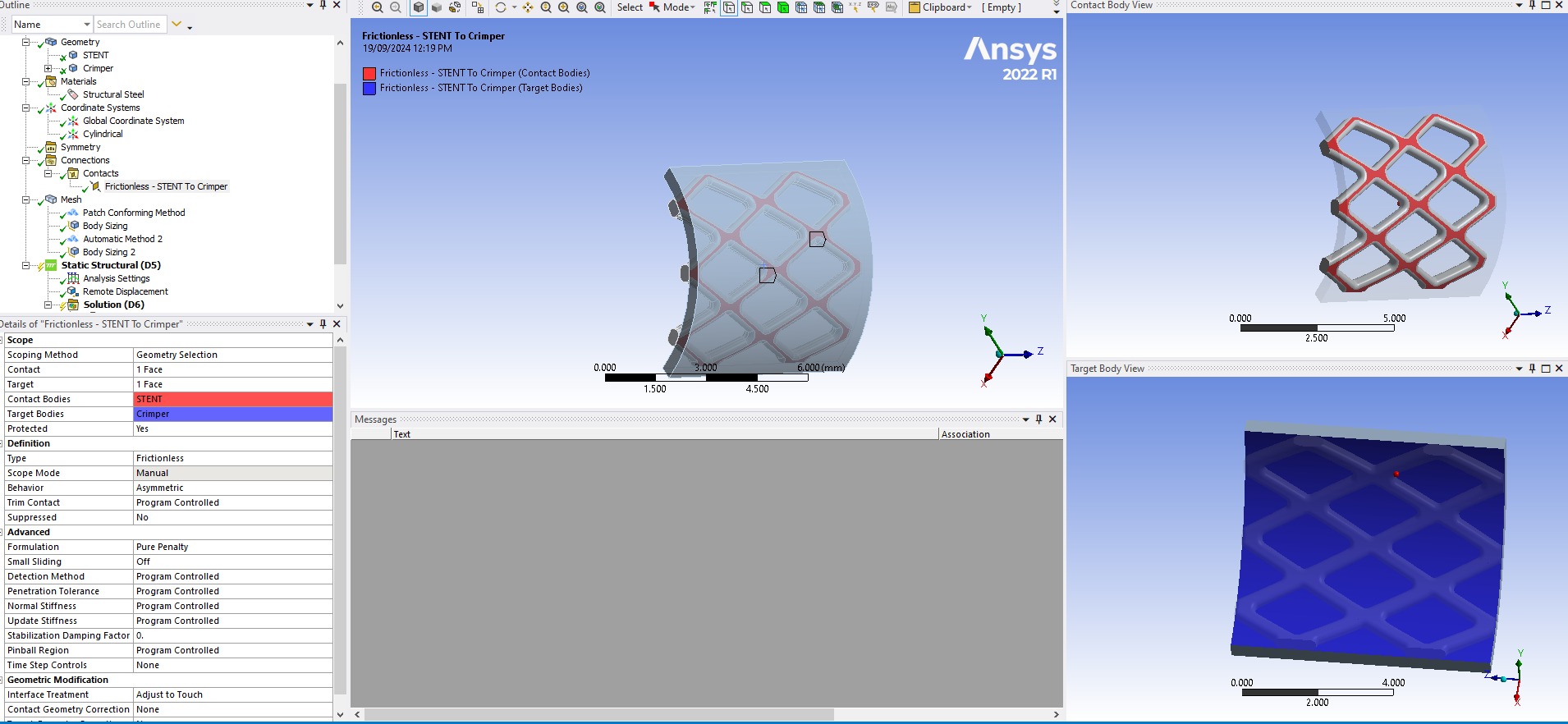
- The interaction between the inner surface of the crimping head and the stent's external surface is assumed to be frictionless.
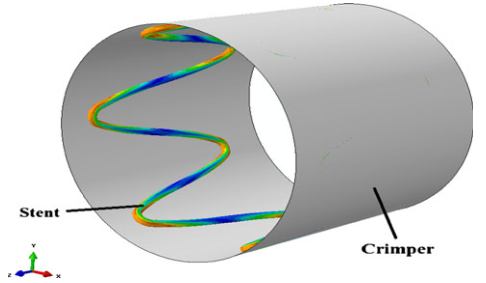
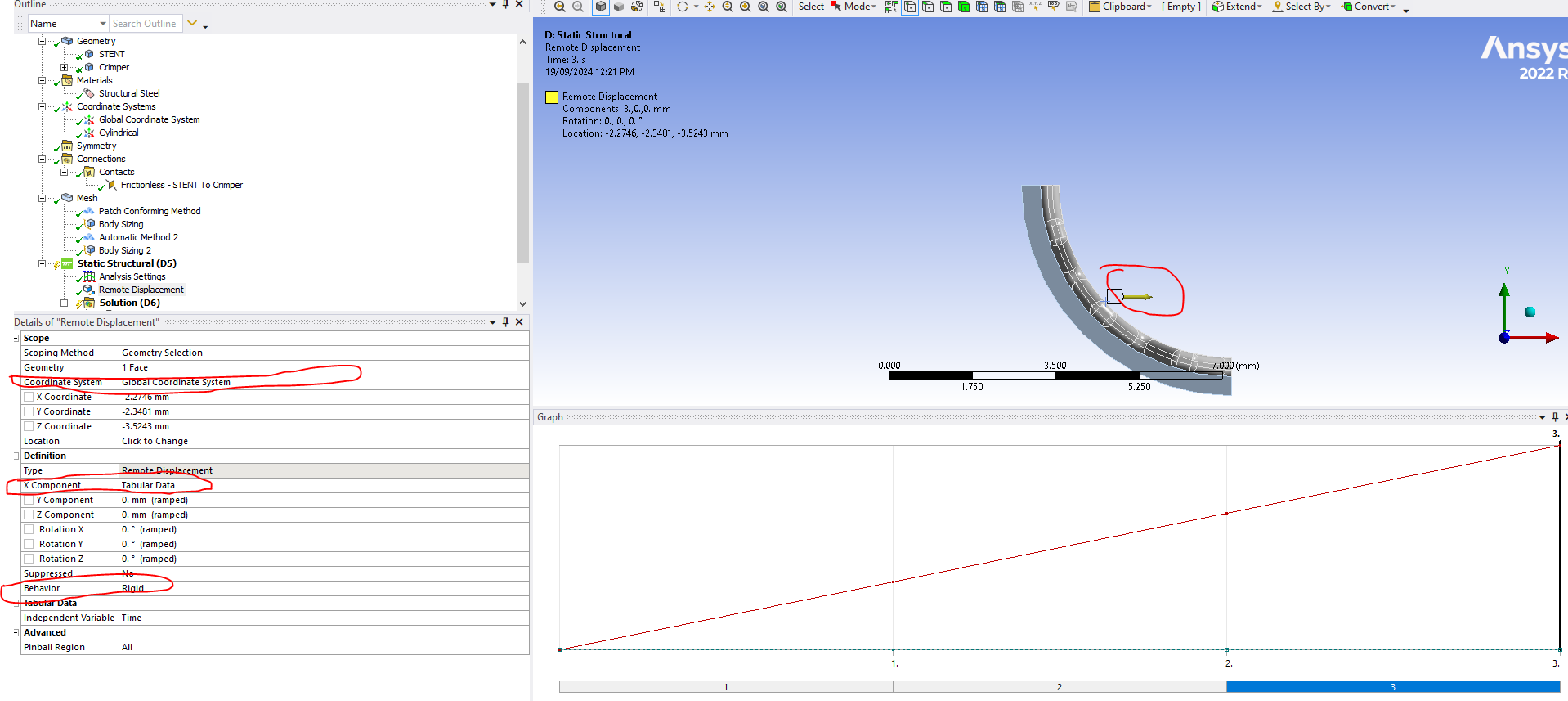
- A remote displacement is applied to a node at the center of each stent to prevent rigid body movement. (by following figure 👇)
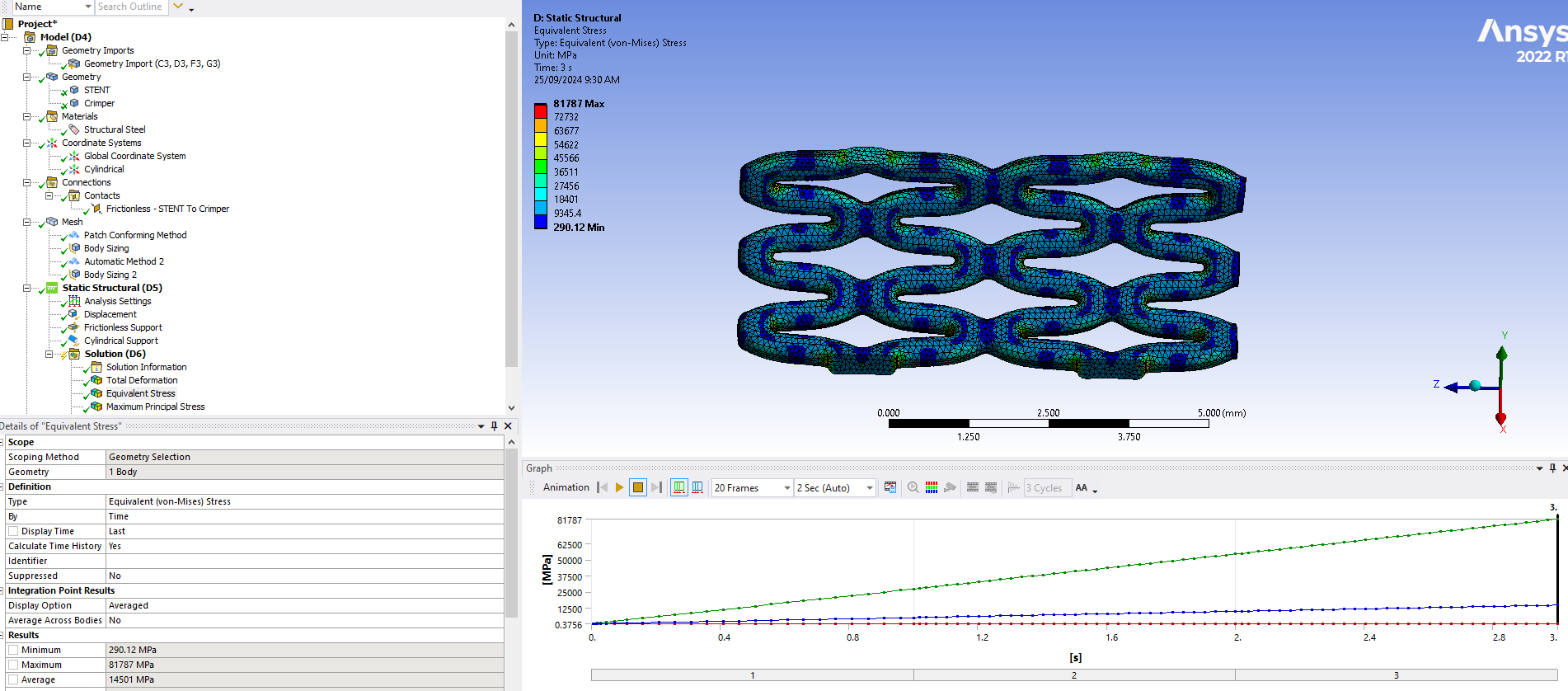
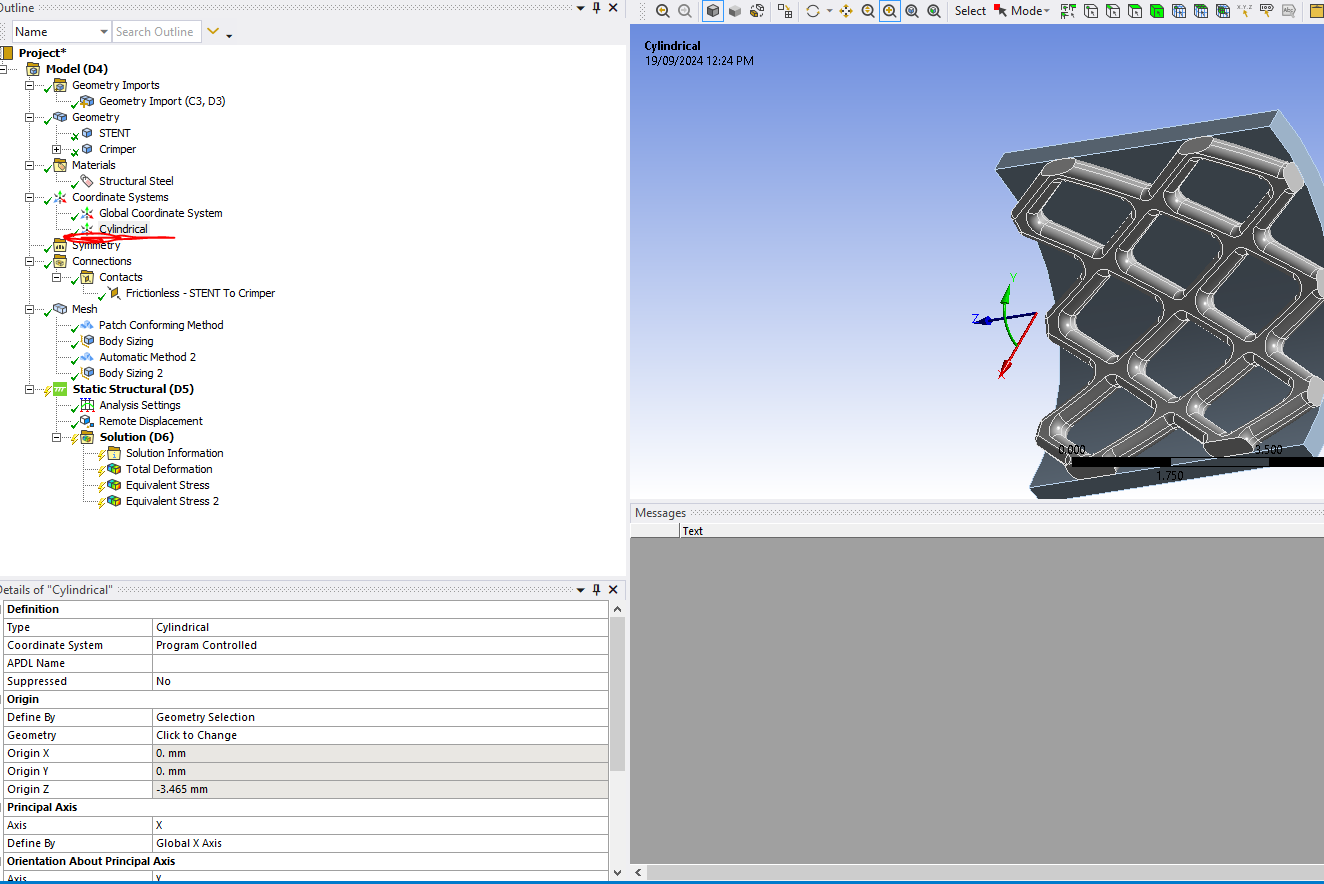
Initially, I defined the crimper material as rigid and manually created a cylindrical coordinate system for radial displacement. I also set the interaction between the inner surface of the crimping head and the stent as frictionless. However, I encountered an issue where normal displacement could not be activated on the inner rigid body surface. To address this, I used a remote displacement with rigid behavior and tried changing the global coordinate system to the created cylindrical coordinate system which is not working. Even, cylindrical support does not work on the rigid body's face.
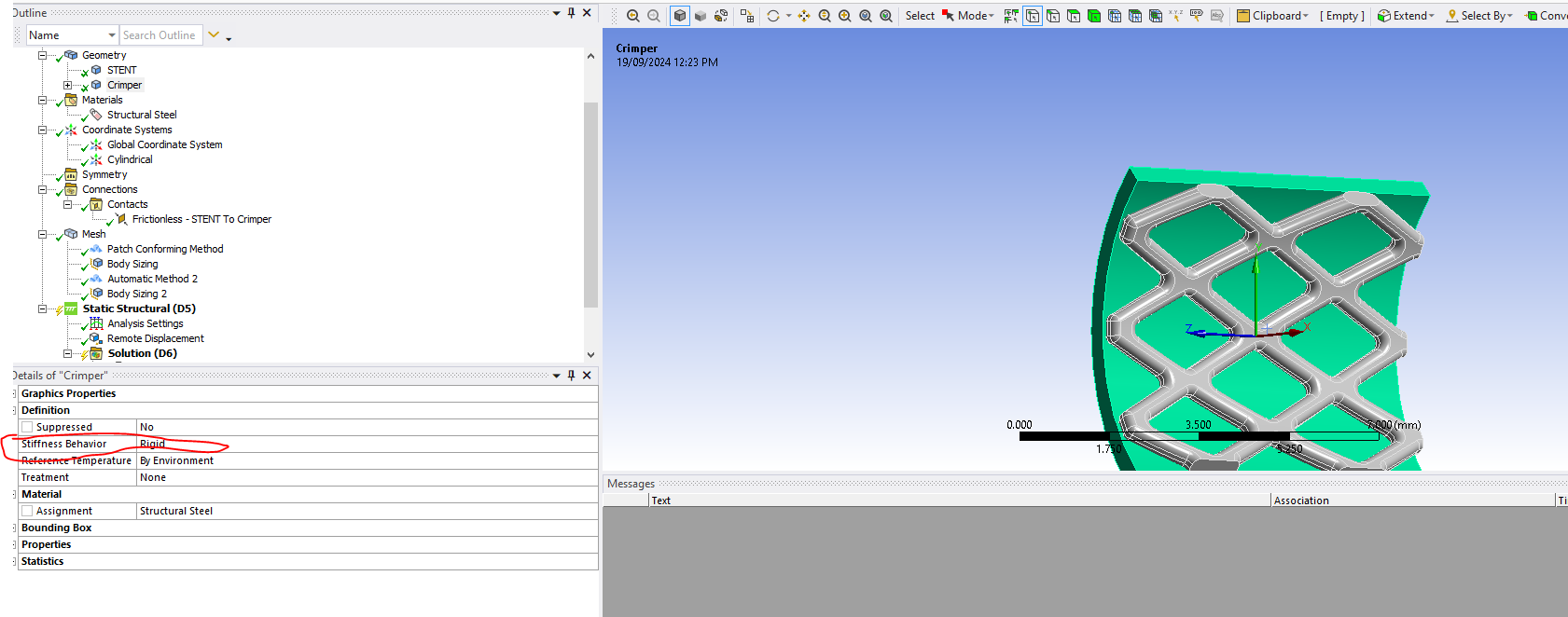
Could you please advise on how to correctly input the radial displacement boundary condition on the rigid body in this scenario? 🙏
Thank you in advance for your assistance.