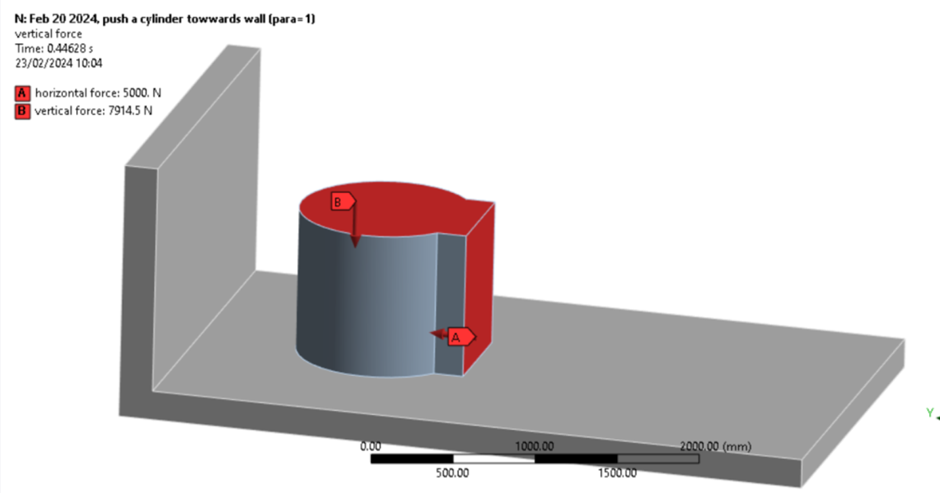
I've been doing some research on the Gap contact issue. For example, a cylinder is subjected to a horizontal(and vertical) load. In real life, I might not know if the cylinder would touch the wall, however, when it happens, I hope to obtain the stress/deformation of the cylinder. I assume at that time point, the cylinder firmly touched the wall, just like there is no initial gap between the cylinder and the wall.
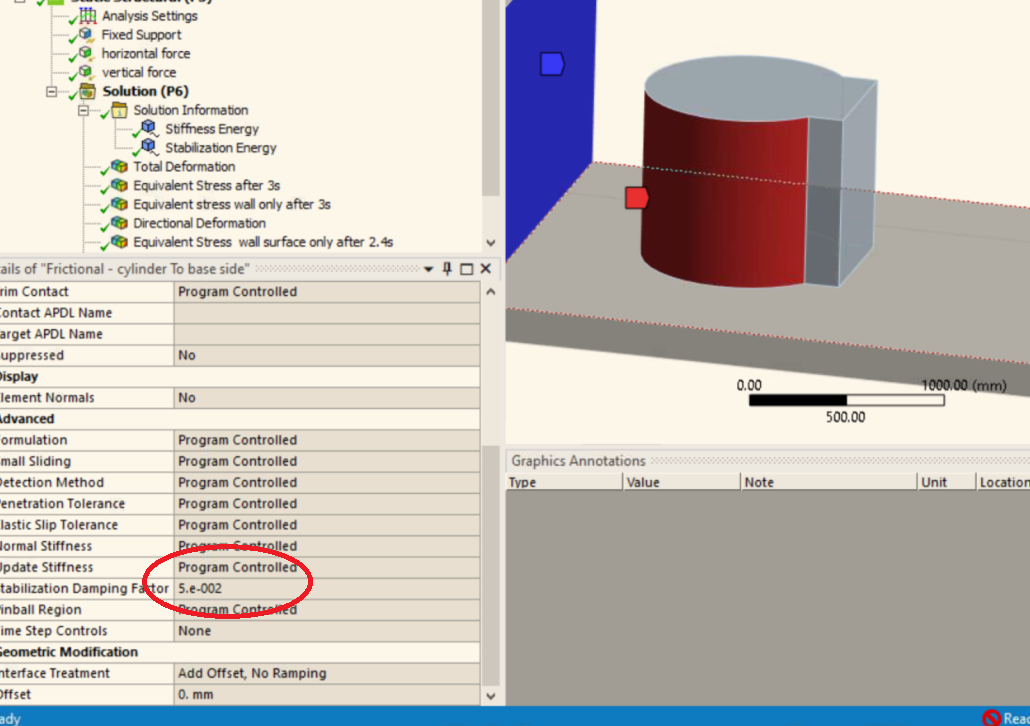
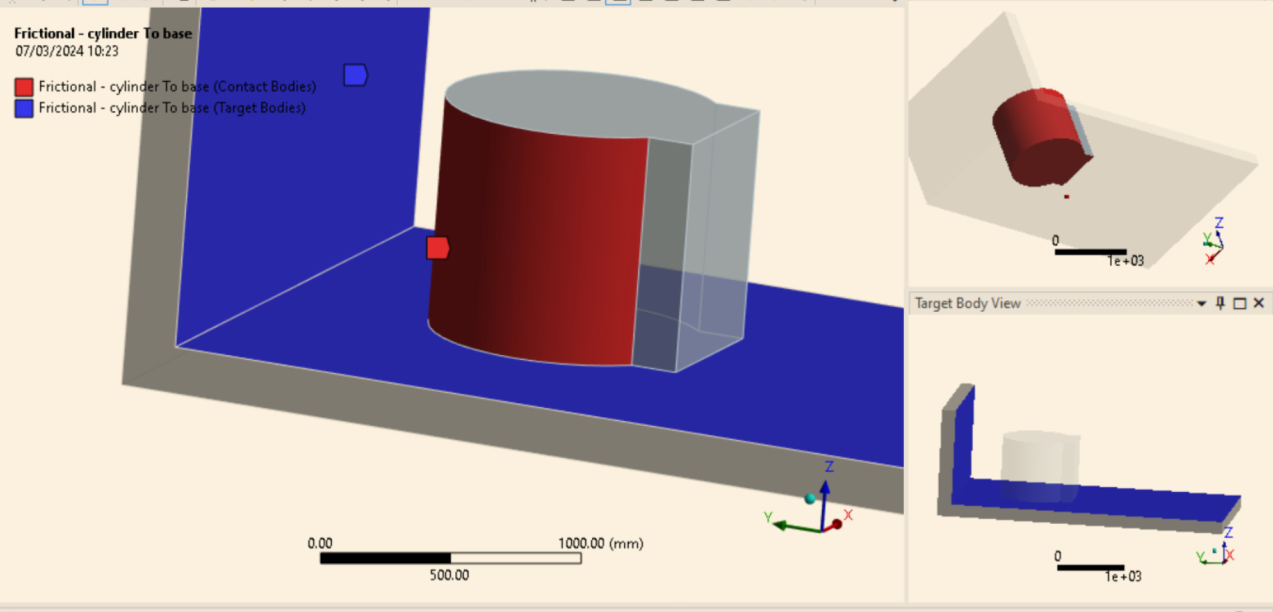
So I made a model, the idea of this case is that the cylinder and the wall initially have a distance and due to the horizontal load, the cylinder eventually touches the wall. The contact types are frictional (frictional parameter=0.2) and the horizontal force is higher than the frictional force due to the vertical force so the cylinder will be pushed towards the wall.
From my imagination, when the same force is applied to the cylinder. The final results (Von Mises stress and deformation) of the cylinder and the wall shall be identical no matter whether the cylinder and the wall initially touch each other or not.
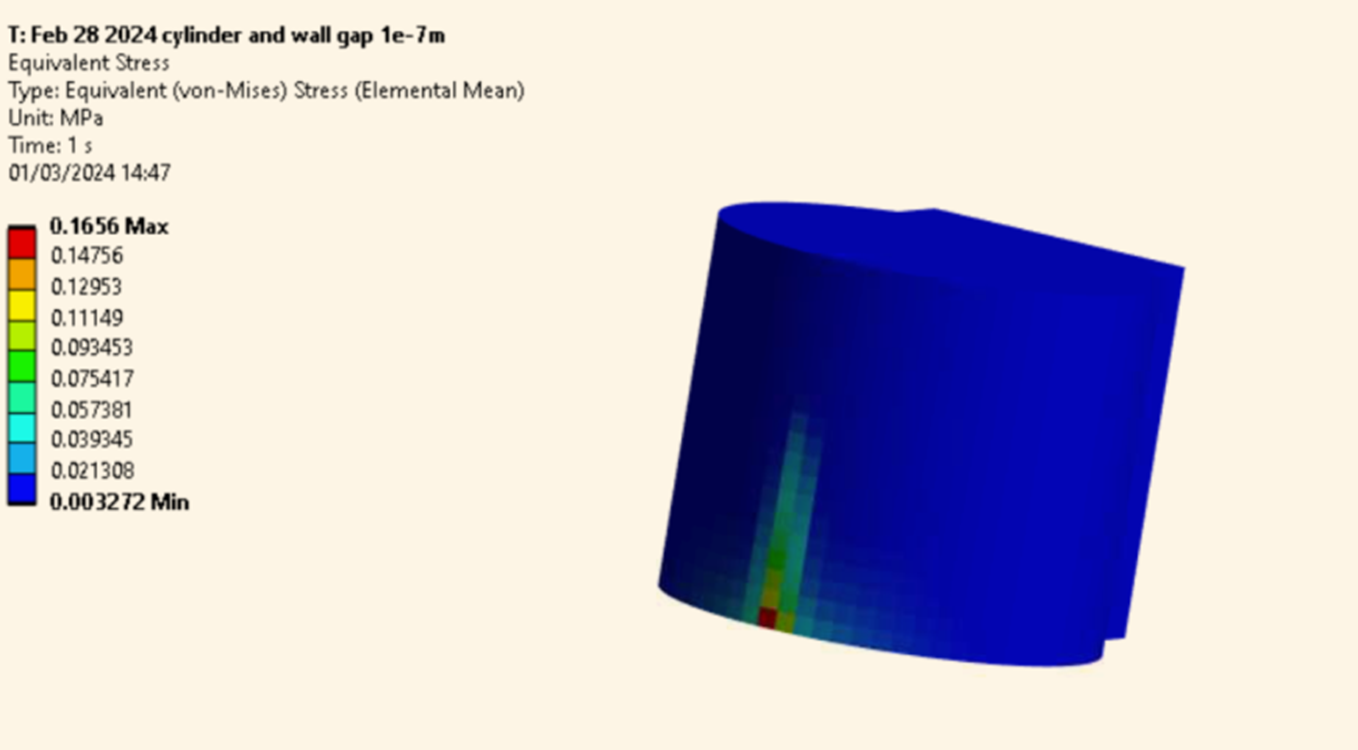
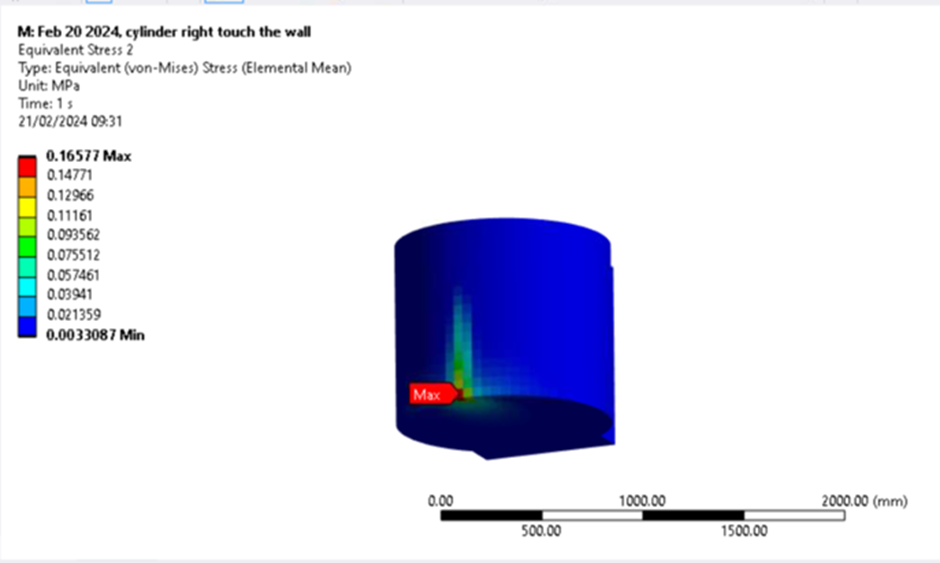
So I chose Static Structural system, in Analysis settings, I turned on "Quasi-Static Solution". I firstly made a system with zero distance and obtained the results. The stress distribution of the cylinder is shown below. We can see the max Von Mises stress is about 0.165Mpa.
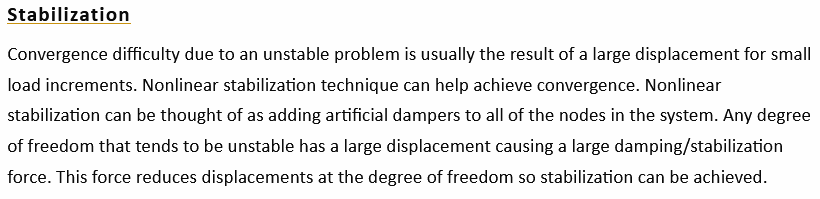
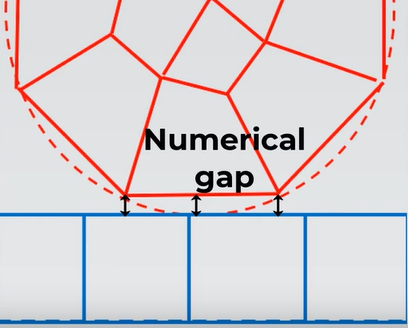
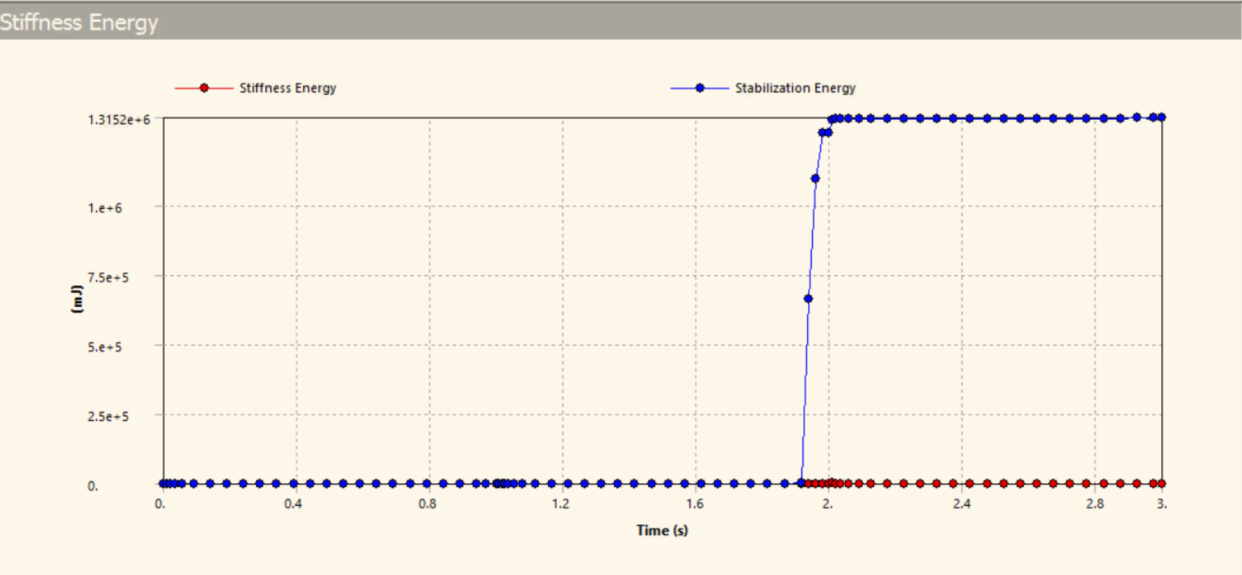
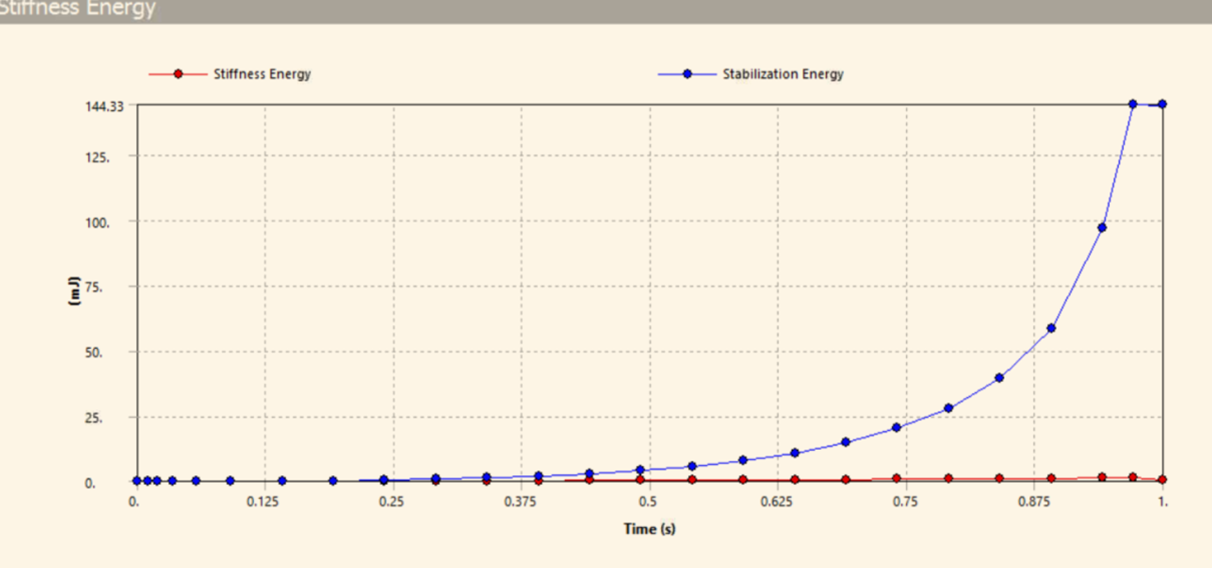
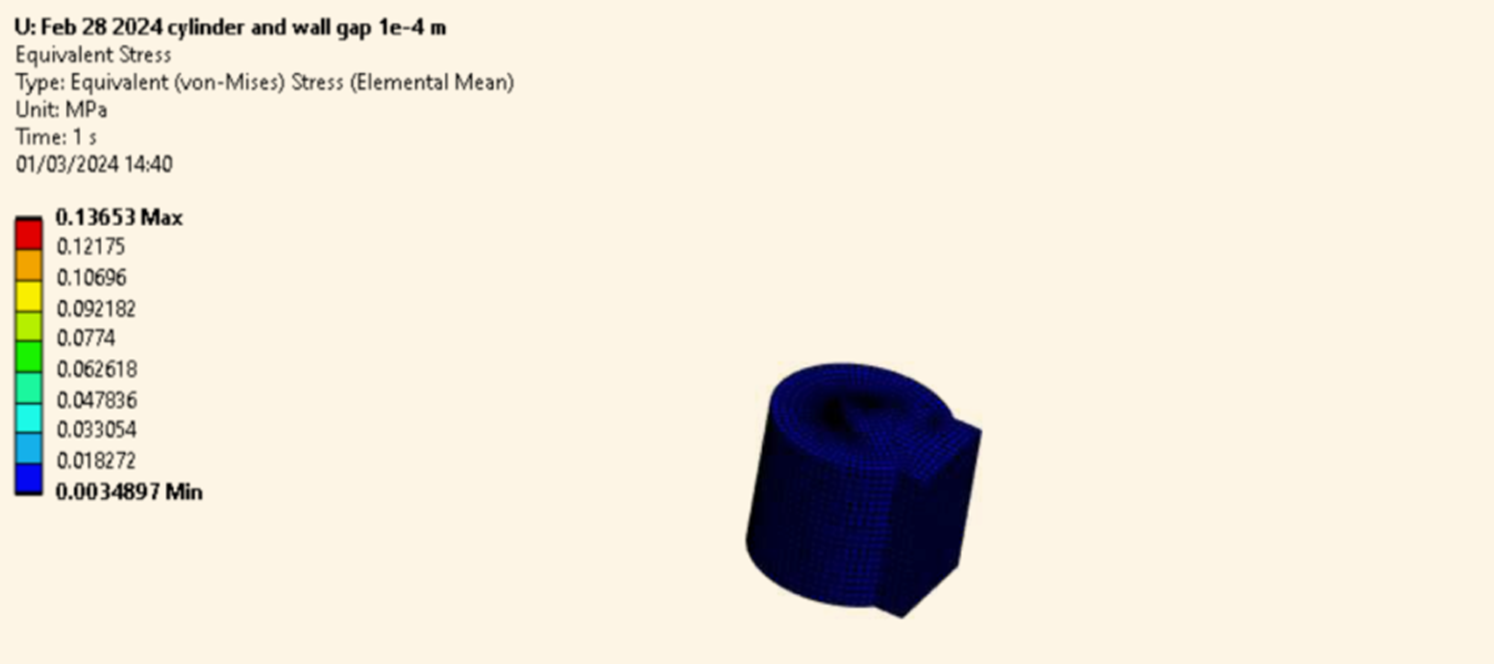
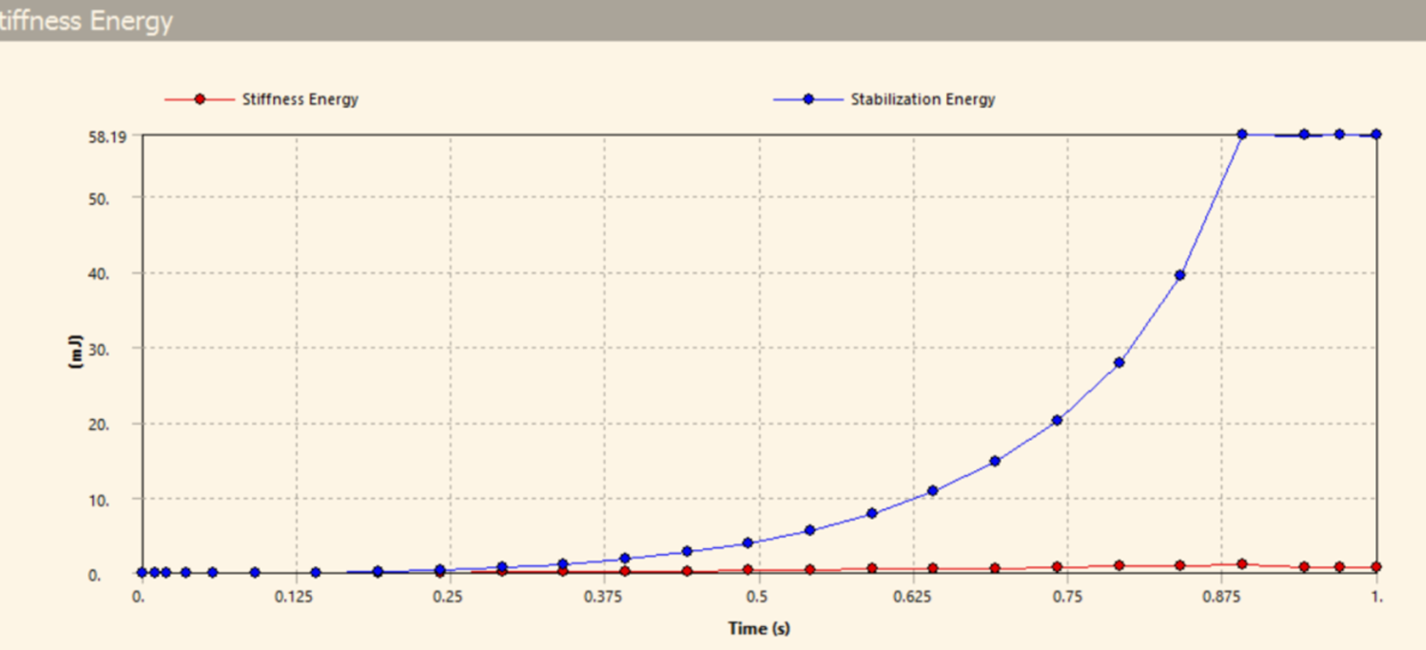
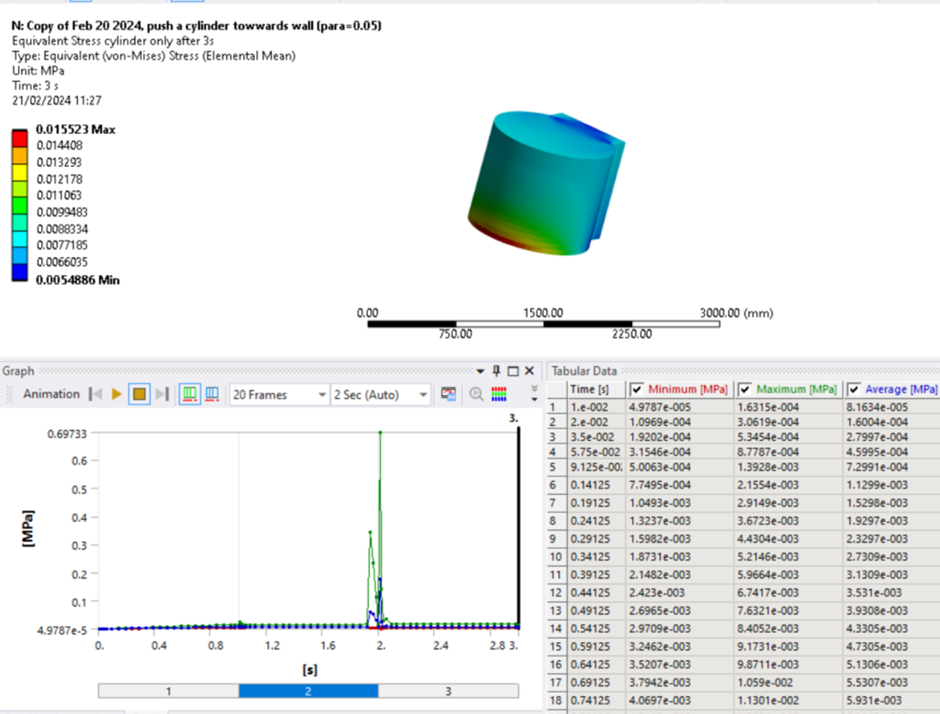
Secondly, I made a new system, this time, I deliberately made the distance between the cylinder and the wall to be 0.6m. The contact type, the load applied remained the same. I used the "Stabilization Damping Parameter=1.0" to make sure the gap contact between the wall and the cylinder can be simulated successfully. After calculation, the Von Mises stress on the cylinder is only 0.015Mpa, I don't why there is so much difference ,see the figure below:
I got confused by the difference in the results. Do you know how I can obtain the same results in the Gap contact analysis as the system with no initial gap? I want to ignore any impact or dynamic effects.
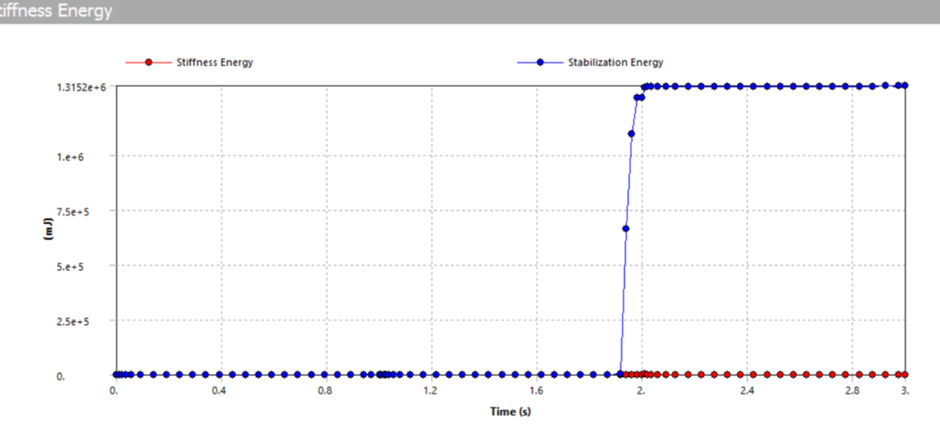
Also I found although I turned on the "Quasi-Static Solution", there is visible acceleration of the cylinder with time, see the figure, which is the total deformation below:
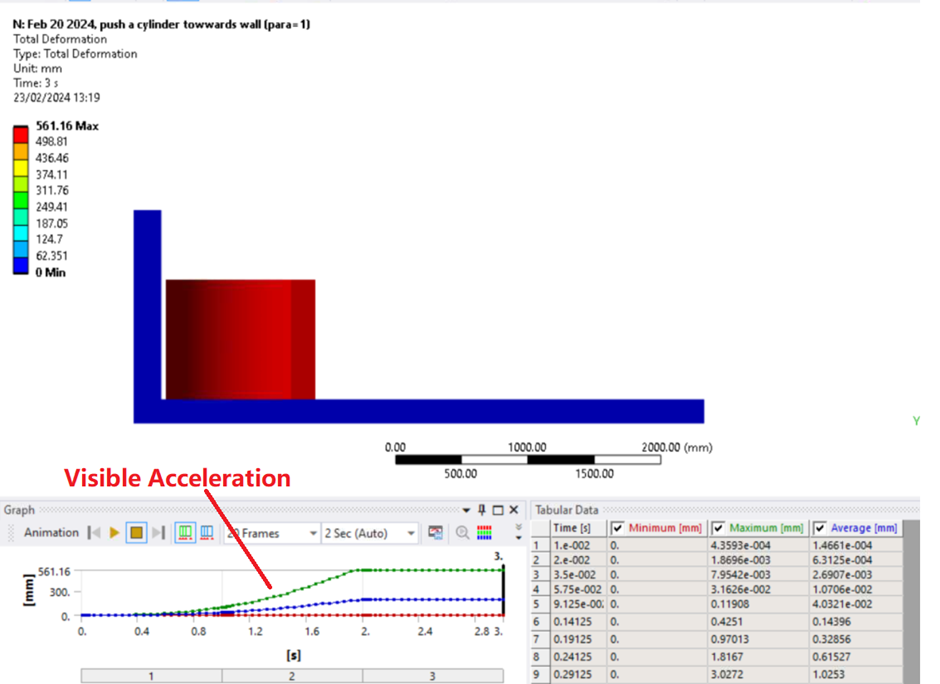
Do you know if the "Quasi Static Solution" neglects all of the accelerations?
Best regards,
Daming