Why do you say "for this study I will need to use transient structural"?
Other than a brief period when the frictional force transitions from sticking to slipping, it is essentially a statics problem with no significant inertial forces. You are using very low velocities.
If the static friction and dynamic friction are the same value, then there is no release of strain energy when the slipping begins so no significant inertial forces develop.
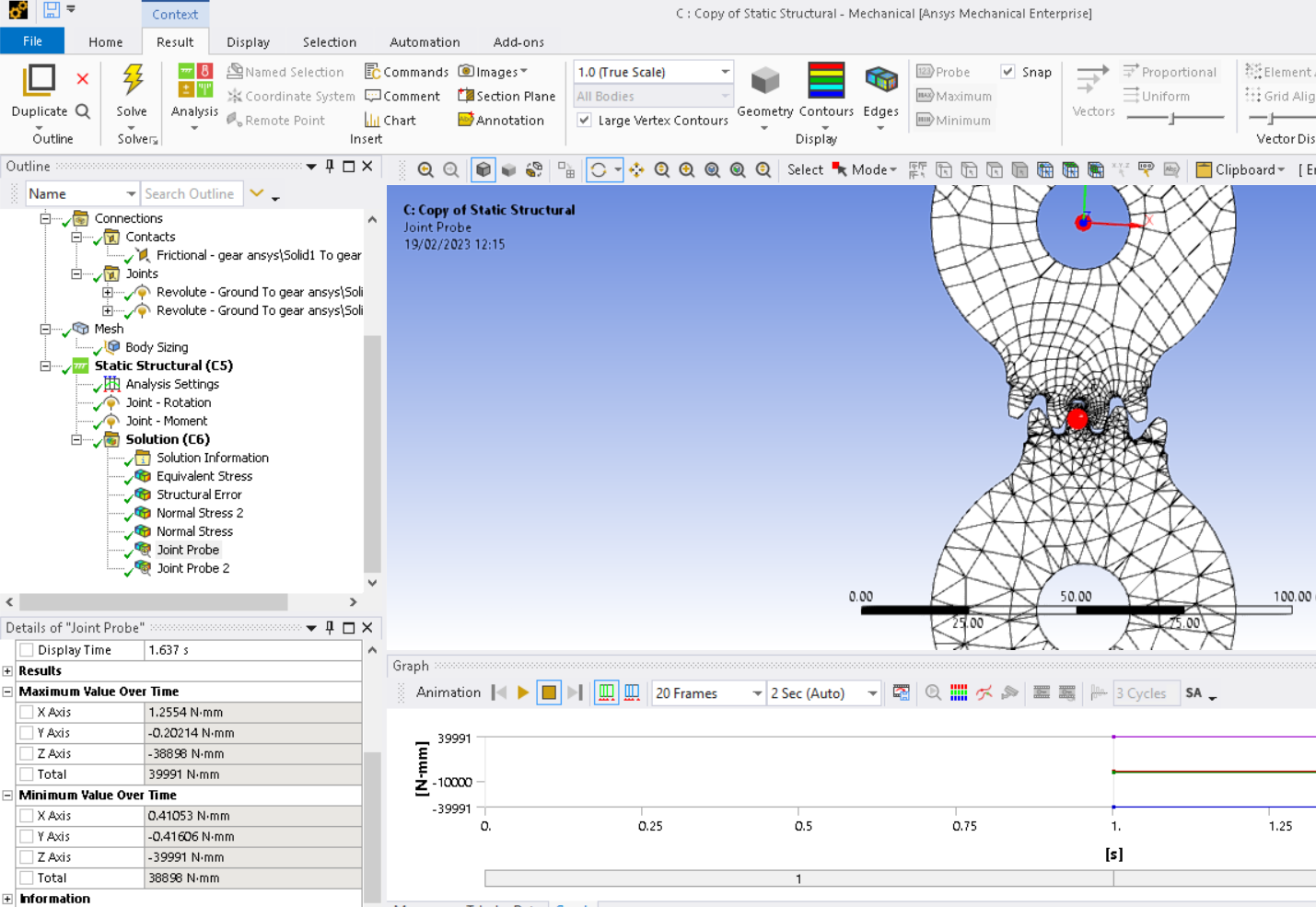
I suggest you use a Static Structural model. Both gears have a Revolute Joint to Ground on the hole ID. One gear has a Joint Load of Rotation, the other gear has a Joint Load of Moment.
A multistep analysis is used. In step 1, the Rotation is set to 0, holding that gear fixed, and the Moment is ramped up to the 40 Nm torque. At some point in step 1, the contact goes from sticking to slipping.
In step 2, a small rotation is ramped on. Sliding continues and the contact point moves up or down the tooth, depending on which tooth you are looking at.