Hi Colleen,
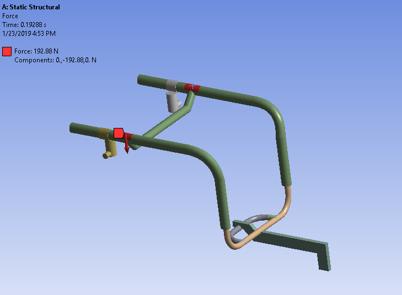
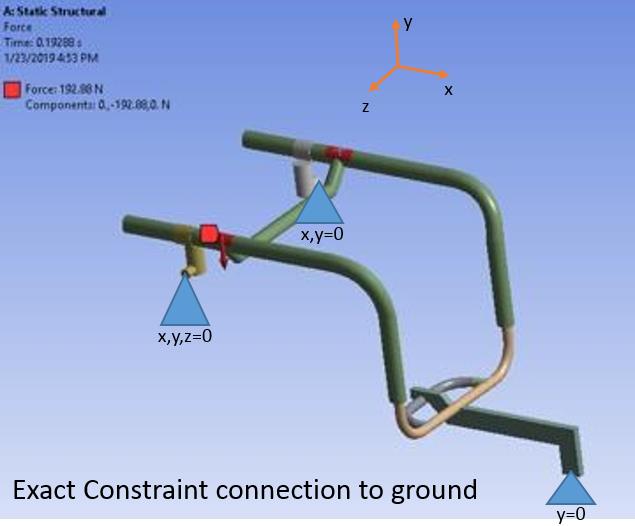
If you are interested in the stress on a wheelchair frame, you might not need wheels or a ground surface to do that. You could create a Remote Displacement scoped to the part of the frame where the wheel connects to the frame and make the remote point at the center of the axle. Since there are two wheels on the ground sharing a common axle, are you assuming the axle has some clearance so the arm can rock between the two wheels freely for a few degrees? If so, that is the point to put the remote point. The Remote Displacement can provide just one constraint, y=0 so everything else is free on two of the "wheels". If you have four wheels, you will have to make one remote displacement have x,y,z = 0 to anchor the frame to a point, while another remote displacement separated along the x axis from the first "wheel" will have y,z=0 to stop the wheelchair frame from spinning about the x,y,z=0 point.
Alternatively, if there is a very stiff and clearance-free connection of the axle to the arm, say through a pair of roller bearings, then you probably need two wheels on the ground surface so the pressure of each wheel to the ground can be different as the frame distorts under load.
Let me know which case applies and reply with an image of the wheelchair frame and the loads you want to apply to it.
ANSWERS
When you create a joint between two bodies, you don't also want contact between the same two bodies. Delete or suppress that.
Once you type Steps = 2 under Analysis Settings, every load in your model now gets two rows; one for step 1 and one for step 2. Type in the values you want to use on each row.
Gravity applies to all mass in the model. If you have a floor, gravity will pull that down too, but the translation joint will support that load as well as the wheel forces.
Regards, Peter