
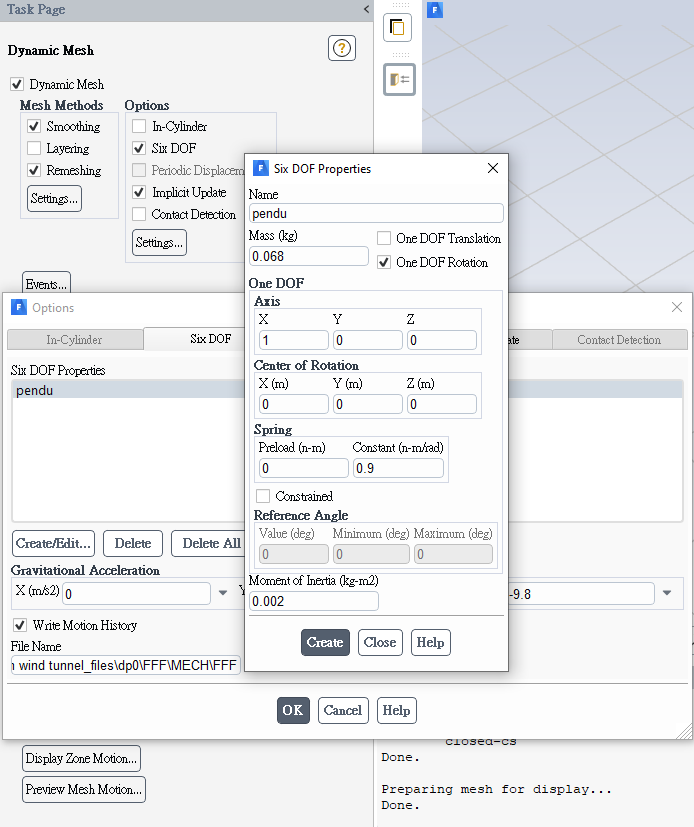
In Six DOF properties, which value of moment of inertia should I enter?




Viewing 3 reply threads
- The topic ‘In Six DOF properties, which value of moment of inertia should I enter?’ is closed to new replies.
















