Hello Dave,
Thank you for your answer.
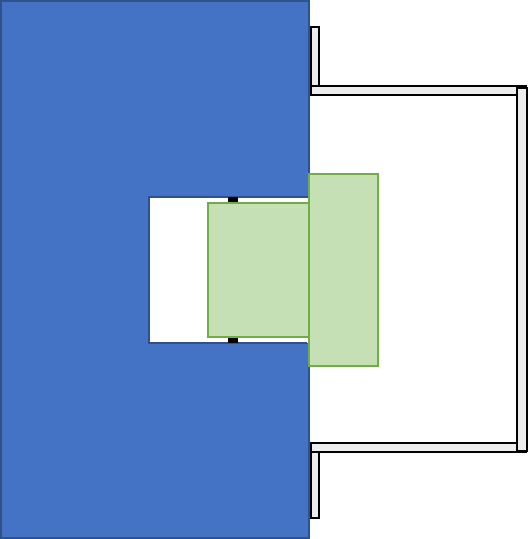
I have built three additional models with your suggestion: one static (with frictional contact between plug and cage, and displacement applied to the plug) and two explicit dynamics with different solvers (autodyn and ls-dyna), both with an estimated initial velocity. To avoid modelling the whole plug, which has a complex geometry, I am using only a cylinder with identical material properties, except for the density, which I have changed to get the same mass) and thus same energy for the explicit analysis).
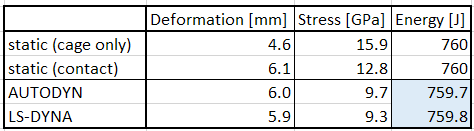
Comparing the 4 models, I am getting different results, specially between the implicit and explicit analyses. Please see the table below. It shows the deformation and stress results for the cage in the time step which the kinetic energy of the plug reaches the minimum (for explicit) or when total strain energy in the cage reaches the estimated initial energy of the plug (implicit). So the energy column for the explicit analyses shows “input” values, whereas for the static ones the values are extracted from the simulation.
Also please ignore the absurdly high stress values. I am using linear materials and, although this is already an indication that design must be reviewed, I am more worried now in making the FE model right.
I can see that both explicit solvers agree very well. Would you suggest a preferred one? If so, would mind explaining why?
As for the static analyses, the one using contact definition gets closer to the explicit, but it required several tweaks in the settings to achieve convergence. What I don’t get is why the stress levels are so much higher, even with similar deformation.
Now, the thing is.. I would like to rely in the cage deformation to absorb the impact energy, meaning I don’t mind at its going through plastic deformation. In fact, that’s exactly what I would expect to happen. But I guess that this behavior can only be captured with non-linear material properties, is that right?
Also, I considered using shell model to allow an easier parametric study varying the cage thickness, for example.
I’m sorry for the very long post. I hope you can find some time to answer it :)
Best,
Henrique