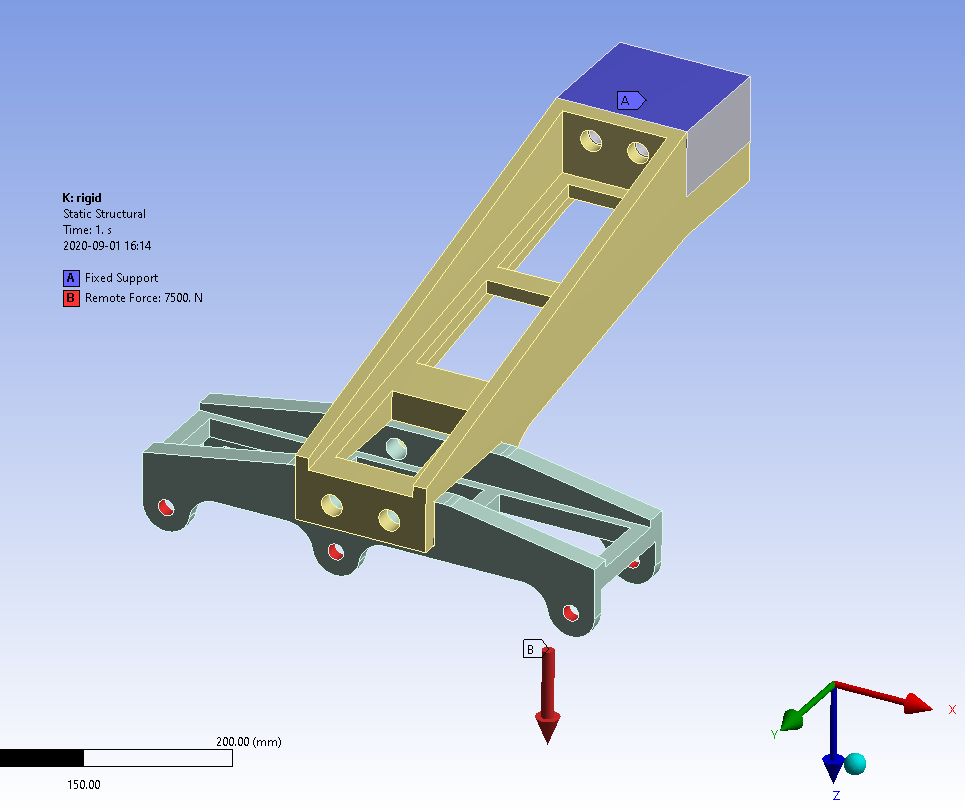
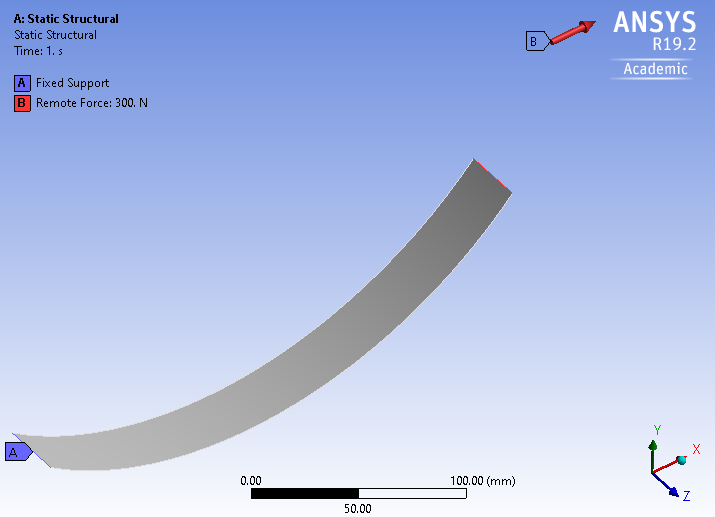
A joint that transmits no forces in any direction and no torque about any axis is not a joint. The definition of a joint is a connection. No force and no torque is no connection.nIn your other post, I see you are using ANSYS 19.2, is that correct? I have that version on this laptop, but it is the academic version so I can only solve small models.nSIDE QUESTION 1nI made a small simple model to show you a remote point that moves during the solution. The force is applied at a rigid remote point scoped to the end of the curved beam.n
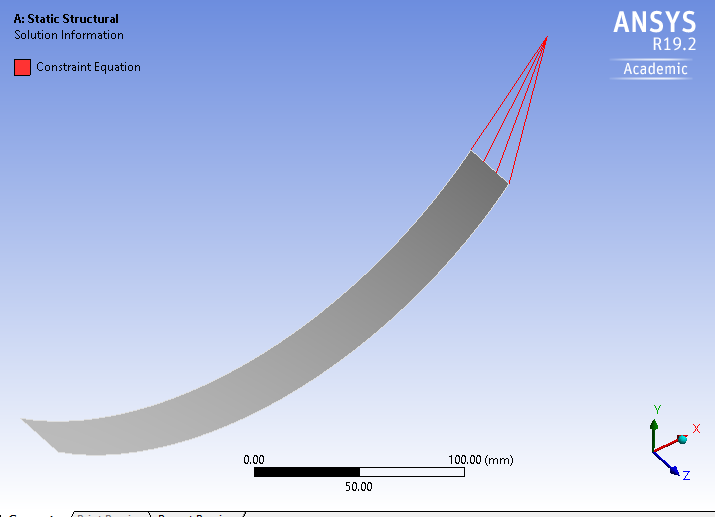
nYou can see the CE elements that connect it to the end if you click on the Solution Information folder then on the Graphics tab.n
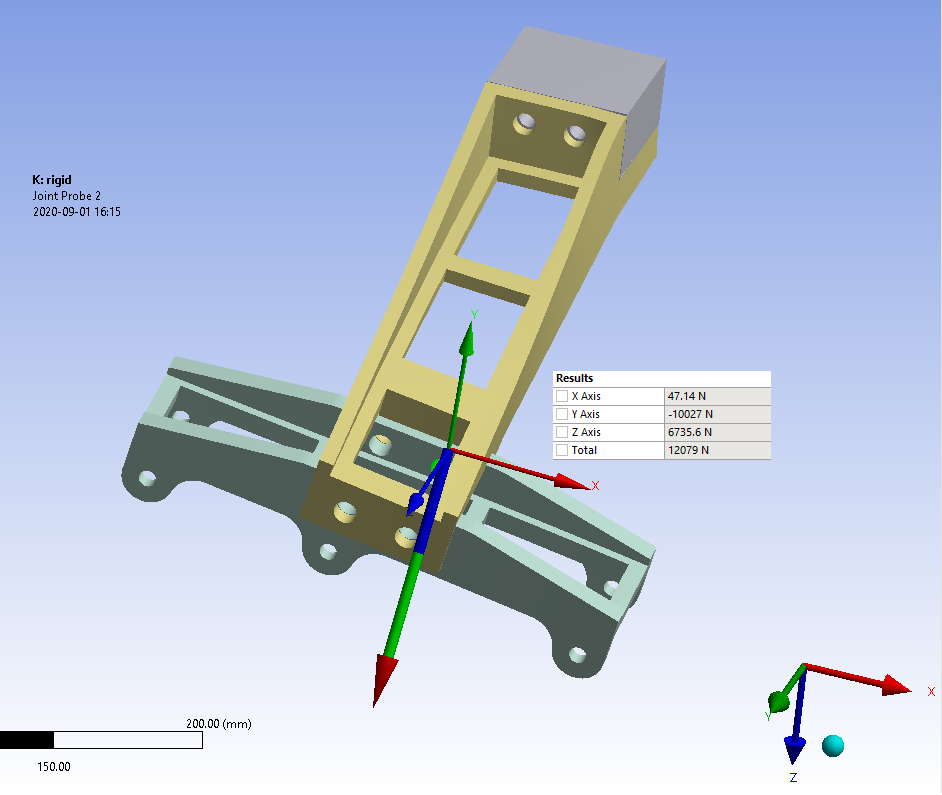
nDue to large deformation effects, the Remote Point moved with the end of the cantilever, but the force did not rotate as the tip deflected, the force stayed aligned with the X axis because it is not a follower force, though that is possible if that is what you want.n

n