Hello,
I k I know this has been raised several times but I reached a point where I couldn't go on anymore. I'm trying to simulate the motion of a planing hull through regular head sea waves in order to predict the heave and pitch motions. I keep getting negative cell volume error after 600 or more iterations (depending on my time step size). The geometry created is for half a hull from the transverse section. I will start from the mesh. my mesh is shown in the following figure:
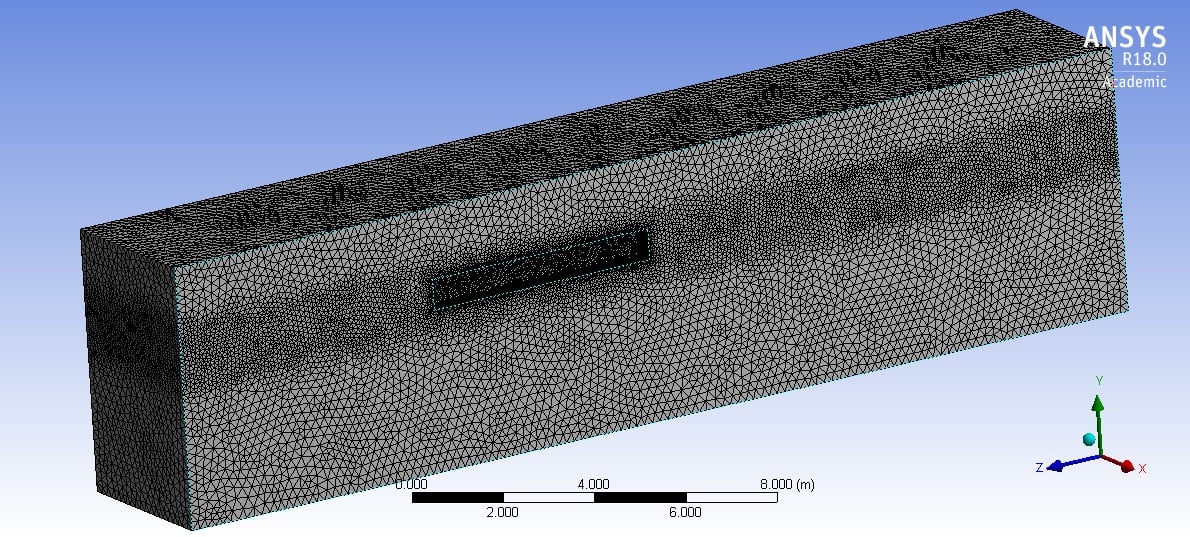
Min orthogonal quality is 0.2524
Max skewness = 0.7986
Number of elements=1587073
Nodes= 279232
I created a body of influence at the water level to enhance the mesh. the mesh quality check is shown in the following pic:

My setup is created as follows:
1. VOF multi-phase with K-Omega SST viscous as shown below:

Two phase material created with primary as air and secondary as water.
My user defined function is as follows:

my dynamic mesh setup is as follows:

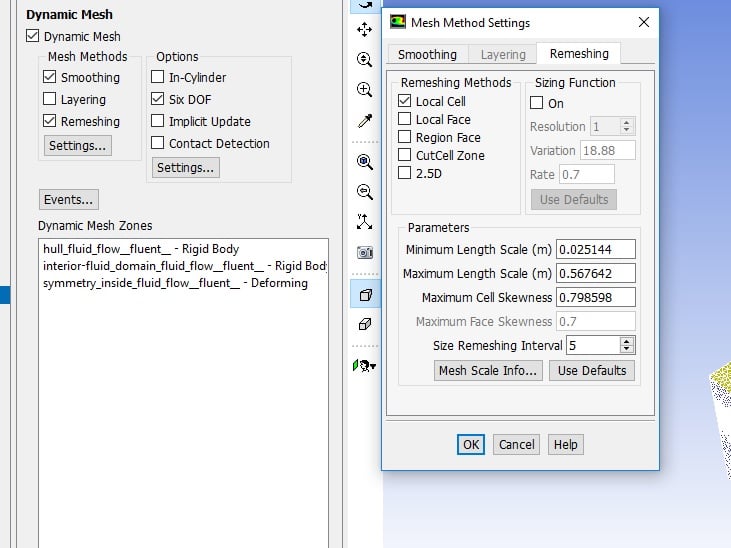
I have tried several setups here like diffusion, I also changed the spring constant factor to 1 or 0 but no hope.
I defined three dynamic mesh zones as follows:
1. Hull as rigid body with 6dof on ( tried to put solution stabilisation with scale factor 0.2 method: coefficient-based).
2. interiof fluid as rigid body with 6dof and passive on.
3. symmetry_inside face as deforming (shown in the following pic)

boundary conditions as follows:


I was confused what to choose for free surface and bottom level but then i understood that free surface is water level which is in my case the point of origin of the coordinate system and bottom is the bottom of the domain which is 4 m below the origin in the y axis.
outlet conditions are as follows:


the hull is a wall and the rest of the surfaces are symmetry.
solution method is as follows:

I tried other options with no hope.
I tried several time step size from 0.01 to 0.0001 with no hope.
Could you please let me know whats wrong with my simulation?
I read that I could define the moving mesh zones as user defined, could you please let me know how ?
Many thanks in advance.




















