Hi Daniel,
Thank you for those extra details, now I understand how the mechanism is supposed to operate.
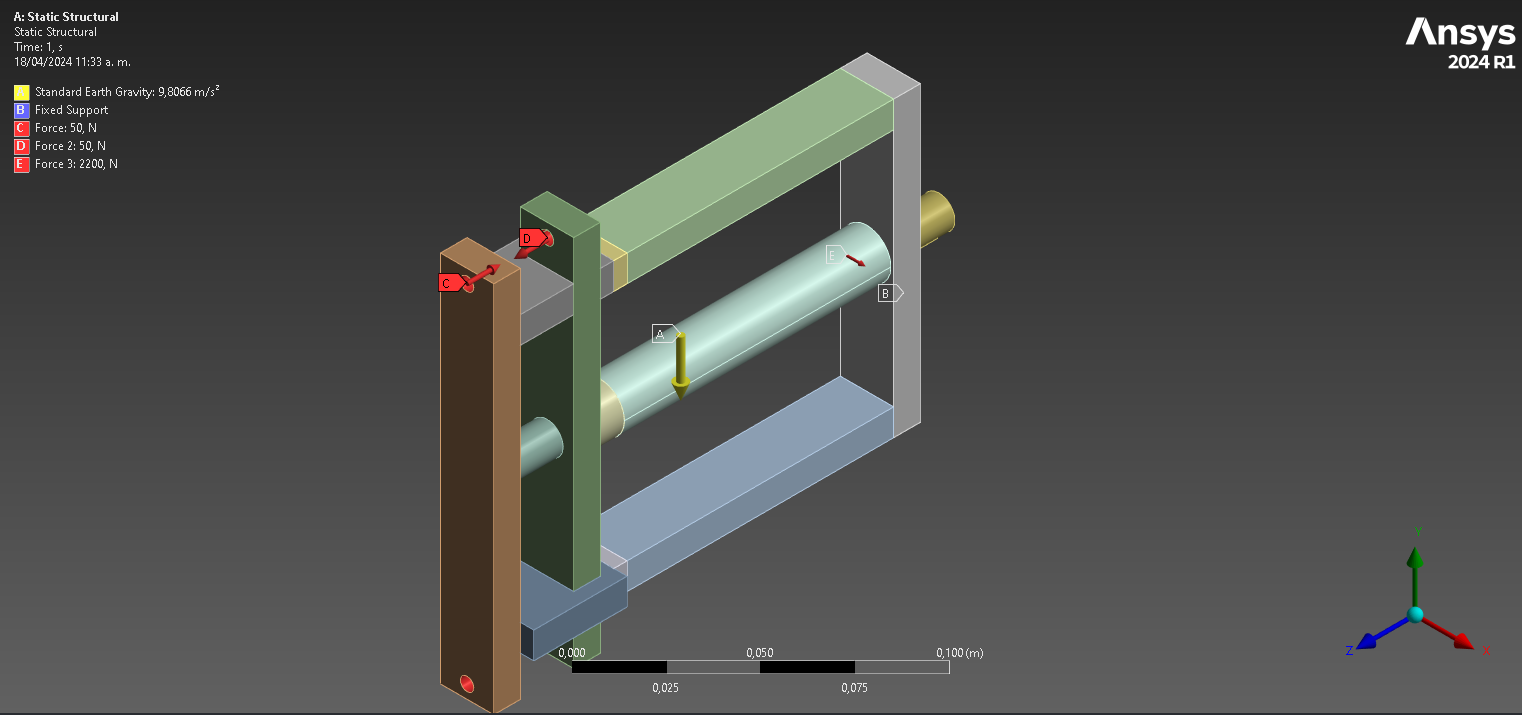
It would be best to create a coordinate system that has a direction normal to the lever to use with a Remote Displacement on the hole in the lever. In a Static Structural model, it is much easier to solve with a displacement input than a force input, especially when there is friction and the mechanism is initially sticking and then breaks free. Request a Probe on the Reaction Force of the Remote Displacement to show the force vs time. Use a small displacement of the lever. Under Analysis Settings, turn on Auto TIme Stepping and set the Initial and Minimum Substeps to 30 and the Maximum Substeps to 3000. That will guarantee you get at least 30 points on the Force-Displacement plot.
If you don't get this working, use File Archive to create a .wbpz file and upload that (not the .wbpj file) to a file sharing site such as Google Drive, OneDrive or Jumpshare. If you use Google, make sure that you choose to allow anyone with the link to download the file. I will take a look at your model.
 This topic has been answered!!
This topic has been answered!!