
TAGGED: ansys-mechanical, ansys-student, explicit-dynamic, workbench
-
-
June 24, 2021 at 9:12 pm
iqbalkr
SubscriberHello, so I am simulating a tire-wheel model speeding through a speed bump, in this case at velocity of 10 km/h. I have been fiddling with the stiffness of spring and the damping coefficient and can't seem to find the solution to the bouncing happening on my tire model. Is there something I can do to eliminate this and make the tire go through the bump/road normally? Or is it a problem with my material that I have to change? I applied force to the top of the fork to simulate the load given by motorcycle and passenger, but it seems that it's not given constantly to the tire I might say. This is my Explicit Dynamics setup and the video of the bouncing happening. Thank you.
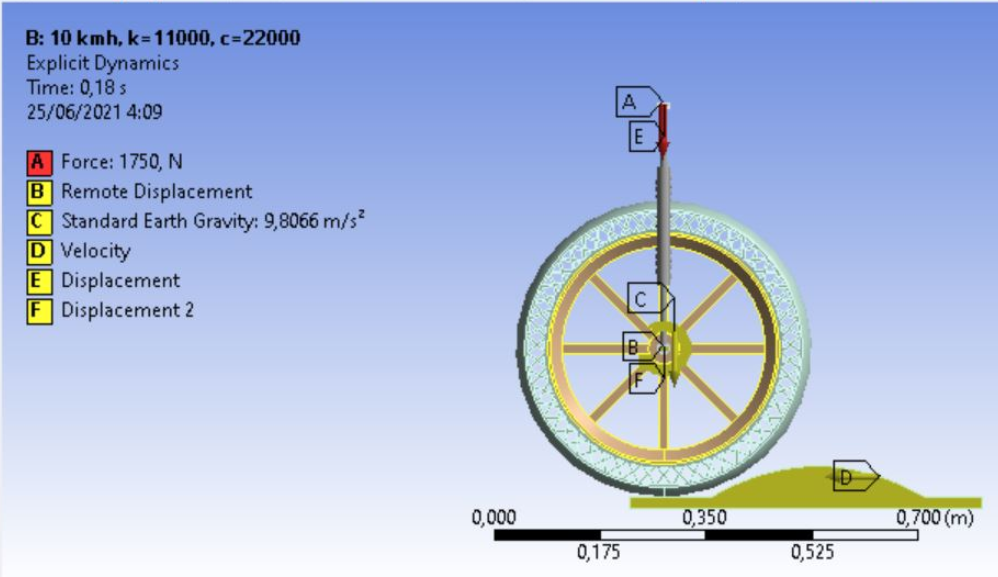
June 24, 2021 at 9:19 pmSubscriber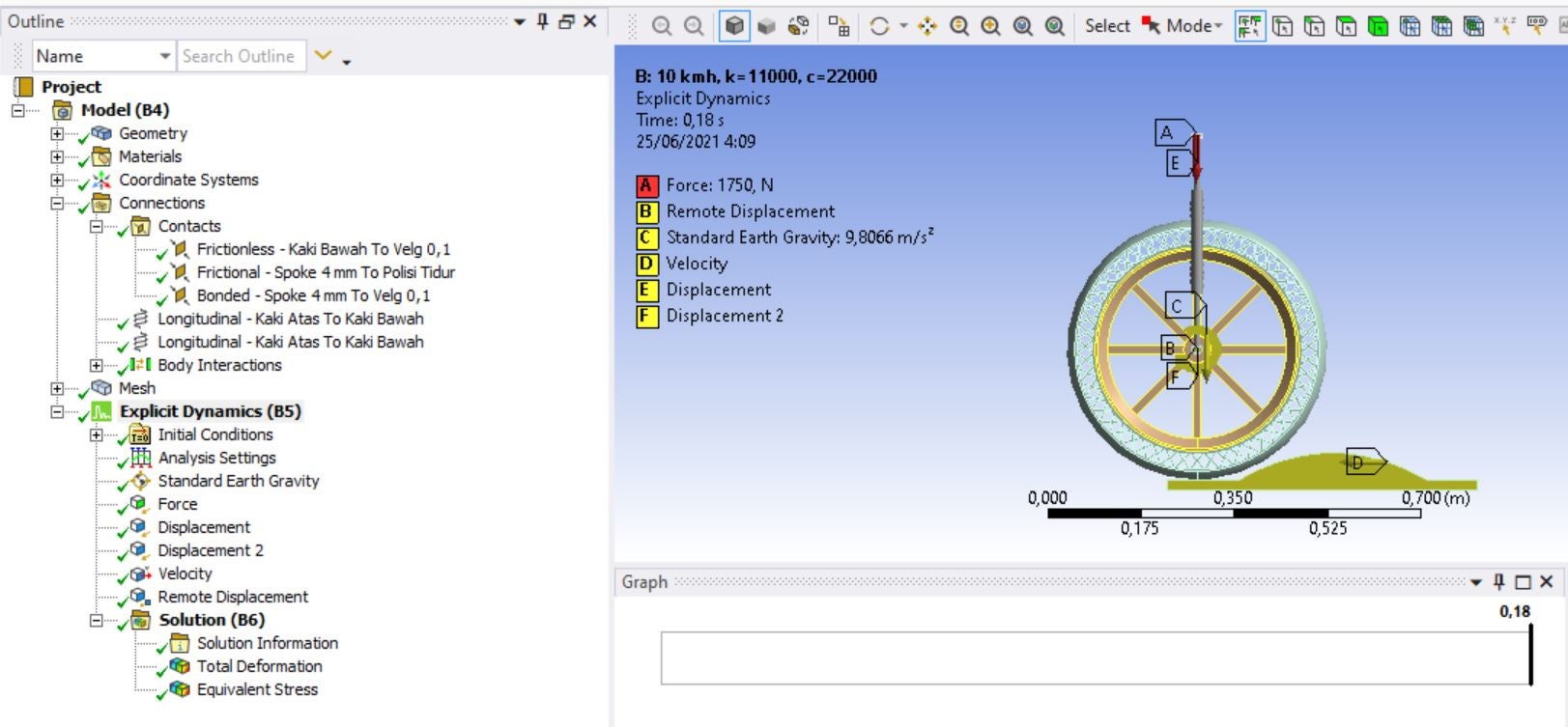 Sorry, this is my setup, and the tire seem to be bouncing a few times when going through the bump
Sorry, this is my setup, and the tire seem to be bouncing a few times when going through the bump
June 25, 2021 at 11:00 pmpeteroznewman
SubscriberI expect the bouncing is because the structure is not in equilibrium with the applied forces at T=0 so when the time integration begins, there are out-of-balance forces that result in an acceleration and start the bouncing. You could use a longer piece of road before the bump and move the wheel back so that it has time to get to steady state rolling before it hits the bump. You will want to make sure you have a spring-damper to absorb the oscillations.
June 26, 2021 at 5:47 pmSubscriberThank you so much I will try this and get back to you soon if I may
June 28, 2021 at 5:22 pmSubscriber, I tried your advice on my model and made a longer piece of road, some models work (thank you so much!) and some don't. So after I ran this model in the video if you could open it, I still encounter bouncing and jittery like happening even before the bump. Is it a problem with my spring-damper setup or should I change another input parameter?
June 28, 2021 at 6:20 pmSubscriberIt's the same problem, you need to let the wheel come to equilibrium on the road surface first, then move it toward the bump.
You could have a 2-step solution. In step 1, there is no forward velocity. The wheel just sits on the road until it stops bouncing.
In step 2, the wheel moves toward the bump or the bump moves toward the wheel. I like the second option better because you can leave the wheel where it is and have a displacement load on the road to move the road to the left.
June 29, 2021 at 1:56 pmSubscriberSo the 2-step solution basically makes the wheel go into equilibrium first before moving towards the bump? If not, I need to make the road much longer? What about the boundaries I gave the model? Is there something you would change to achieve what I meant in this discussion? A: Force Y = -1750N; B = Remote Displacement for the wheel to rotate Zaxis Direction = X┬░; D: Velocity on Bump body in -X direction; E and F: restrict the Fork to only move in Y direction (up and down only)
June 29, 2021 at 4:52 pmSubscriberDo you even need a Fork? I would create a Remote Point at the wheel axle. Apply a Remote Displacement to the Remote Point that is Free in Y and Rotation about Z. Apply a Remote Force to the Remote Point in the -Y direction.
Step 1 allows the force to bring the wheel into equilibrium with the road surface. Run a single step to determine an end time for step 1 when the bouncing has died out.
Step 2 moves the road toward the wheel at a constant velocity.
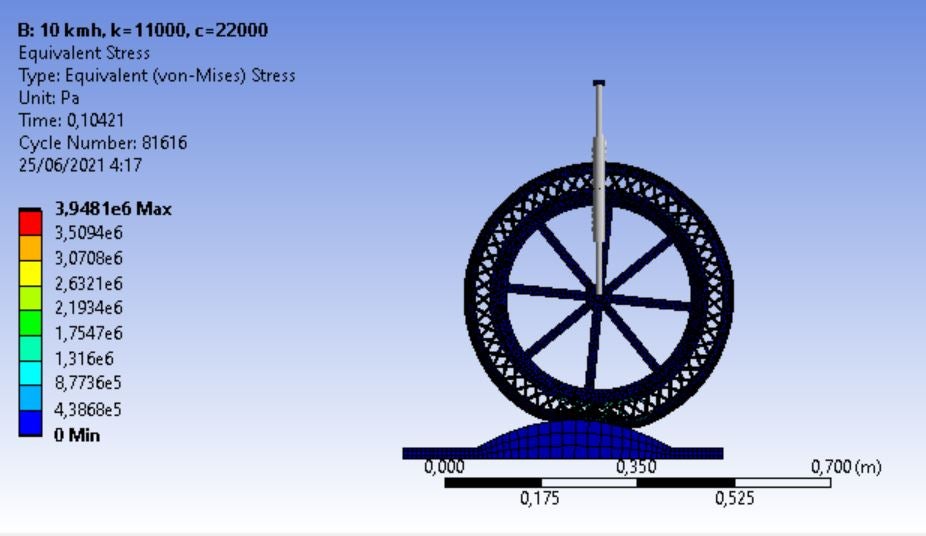
June 29, 2021 at 5:09 pmSubscriberActually I made the fork so that I can create a spring-damper system for the wheel to move up and down while moving, and so that the upper fork itself that represent weight from motorcycle and passenger can still moves up and down itself when the wheel hits the bump. Because if I didn't create the spring-damper system, the force will be too great for the tire to handle and deformed too much. I want to analyze the deformation and stress occurred when the tire hits the bump to simulate a motorcycle goes through a bump on a certain speed. What do you think should I do?
June 29, 2021 at 10:54 pmSubscriberYou need two parts: a Fork and a Frame. The Frame should have the mass m of the bike minus the wheel and fork.
The Fork should have a translational joint to allow vertical motion in the frame.
There should be a Spring-Damper between the Fork and the Frame. The spring should have a spring rate and initial length that generates a force of exactly mg.
There should be a Revolute joint between the fork and the wheel.
Delete the force, just let Gravity act on the Mass to provide the downward force of the wheel on the road.
There should be a Translational joint between the Frame and Ground so that the frame can move vertically.
Step 1 has an end time to allow the flexibility in the wheel to come to equilibrium with the road.
July 1, 2021 at 2:25 pmSubscriberThank you so much for your advices, it's starting to work now :) want to ask another question though, its the 2-step you advised me to do, from this graph the velocity given to the bump will not be constant but instead it accelerates, right? can I make it go instantly to the velocity I want or should I add another step so that before the wheel hits the bump the velocity would be where I needed it to?
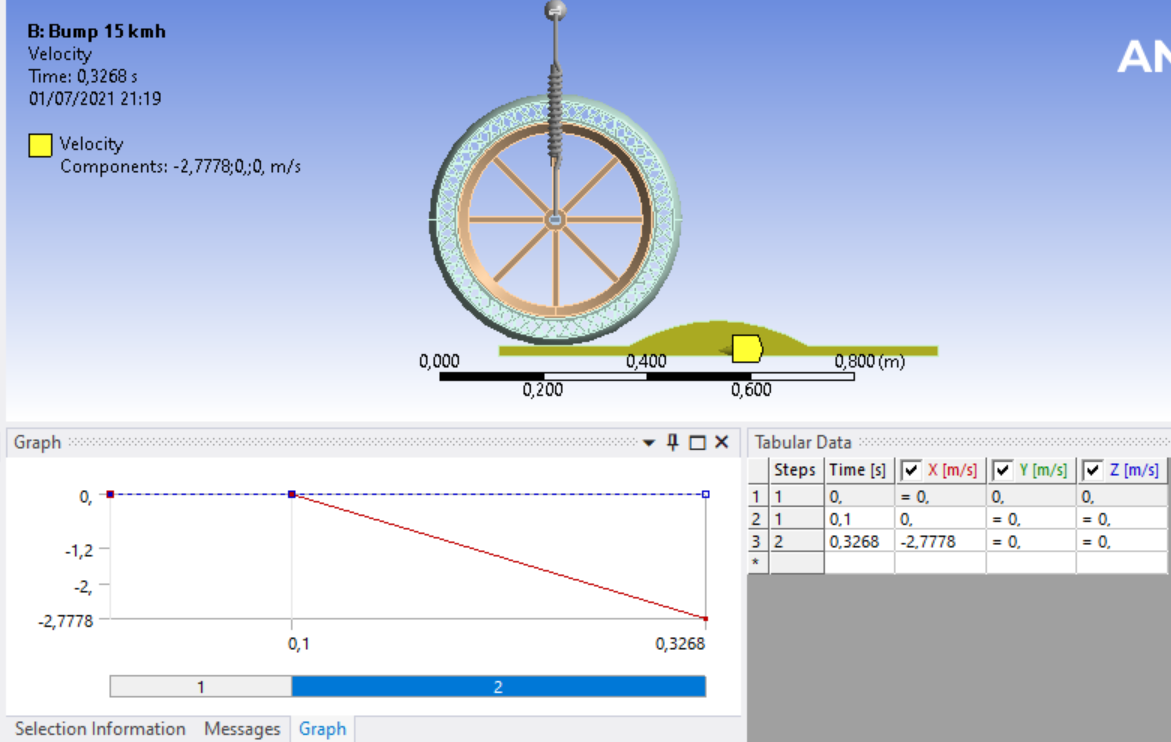
July 3, 2021 at 3:39 amSubscriberYou have a velocity ramp, which is the best way to go.
Make a 3 step solution. At the end of step 2, the velocity has reached the desired velocity before the bump has reached the tire.
The velocity can be constant during step 3 when the tire goes over the bump.
Glad to know the model is starting to behave.
Good luck!
Viewing 11 reply threads- The topic ‘Eliminate Bouncing on Tire Speeding through Speed Bump’ is closed to new replies.
Innovation Space Trending discussions
Trending discussions Top Contributors
Top Contributors
-
peteroznewman
 5799
5799 -
scabo
 1906
1906 -
Dennis Chen
 1420
1420 -
javat33489
 1305
1305 -
Shyam Prasad V Atri
1021
Top Rated Tags
© 2026 Copyright ANSYS, Inc. All rights reserved.
Ansys does not support the usage of unauthorized Ansys software. Please visit www.ansys.com to obtain an official distribution.
-






{kind=link}