Hello Peter,
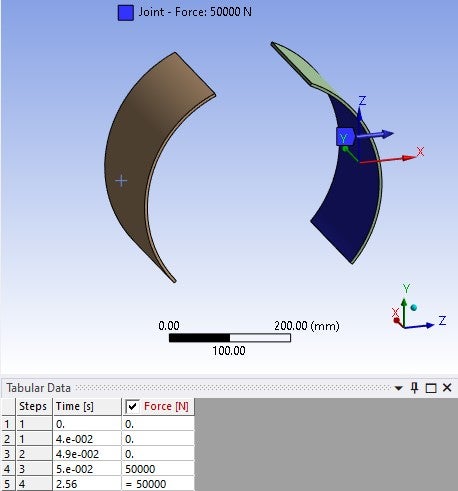
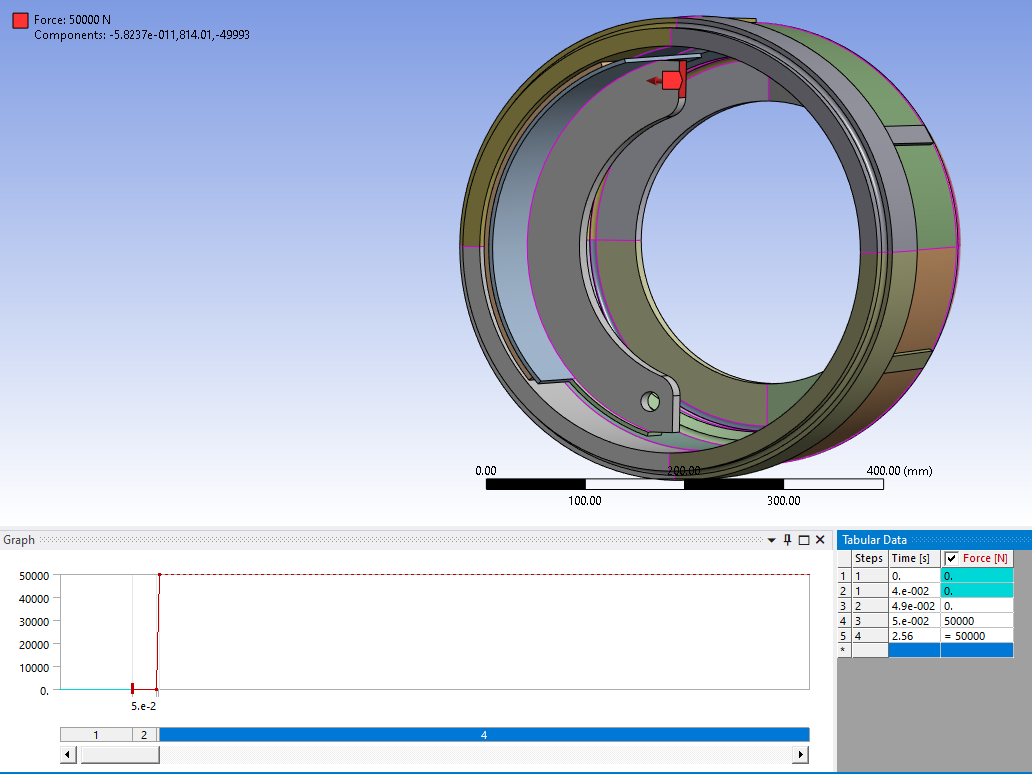
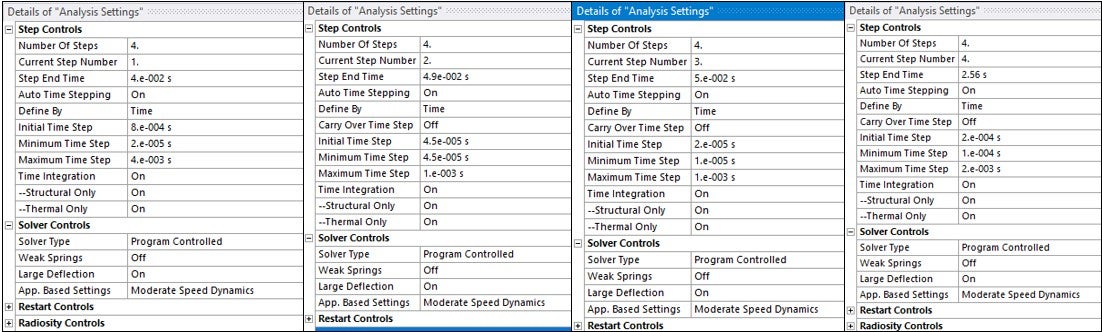
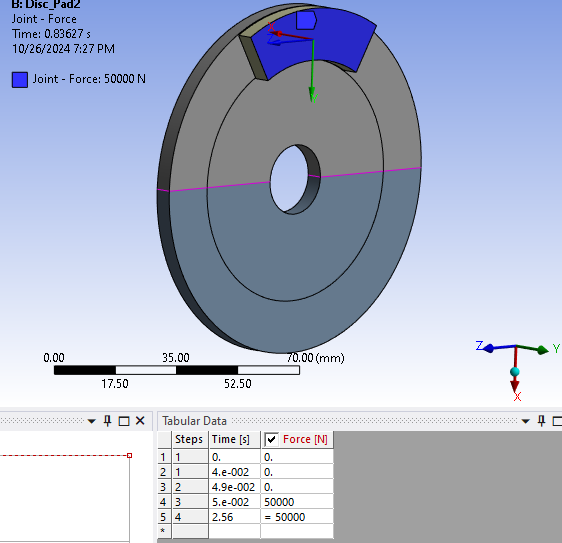
As per your suggestions, I applied the loadsteps with time integration turned off for first step.
After running the simulation, following are the results,
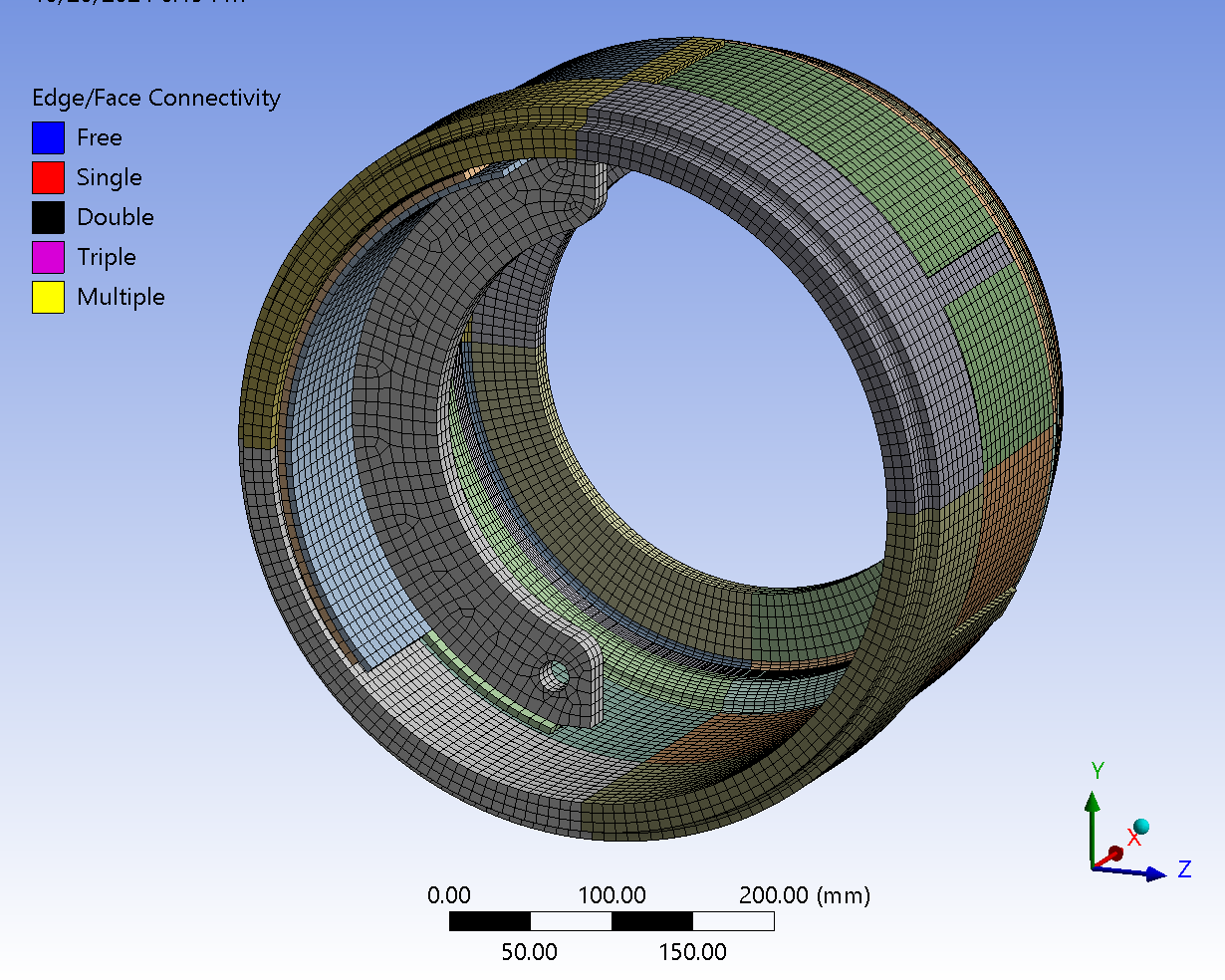
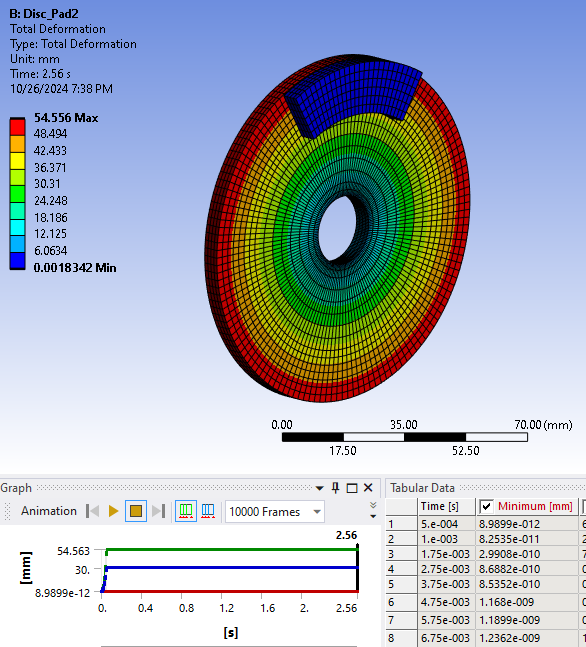
Total deformation-
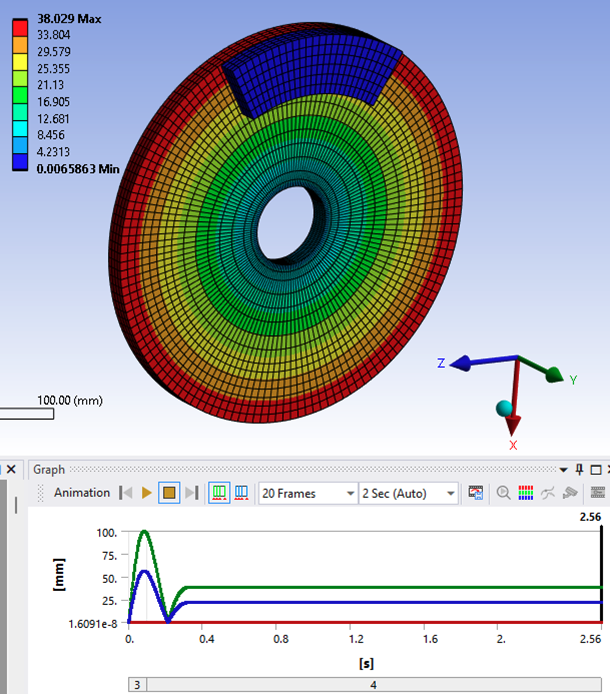
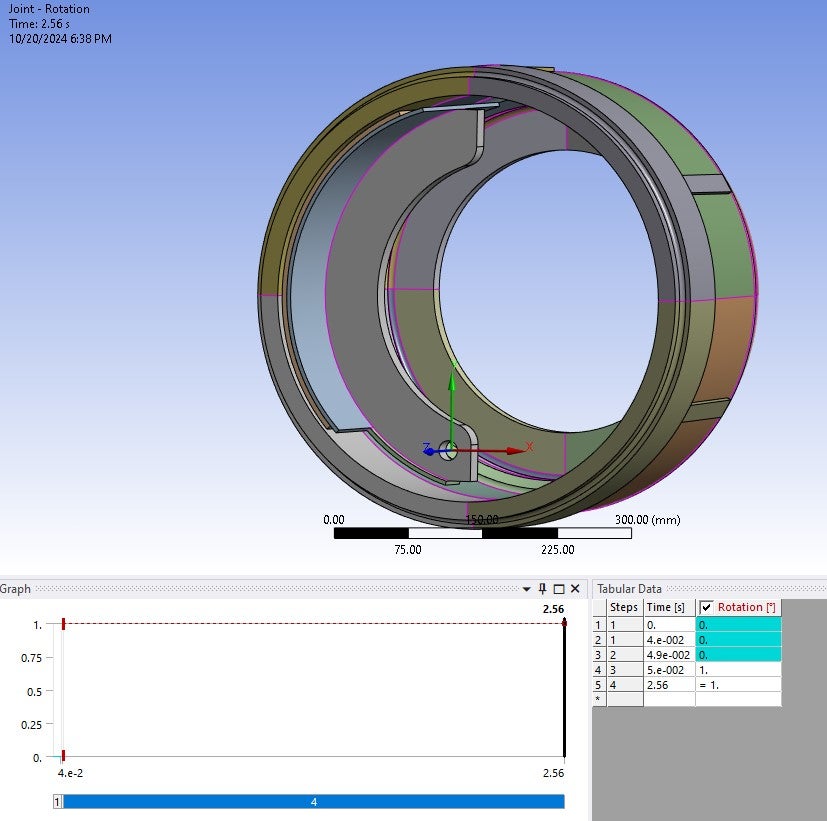
The disc appears to be expanding for total deformation and joint probe (relative rotation).
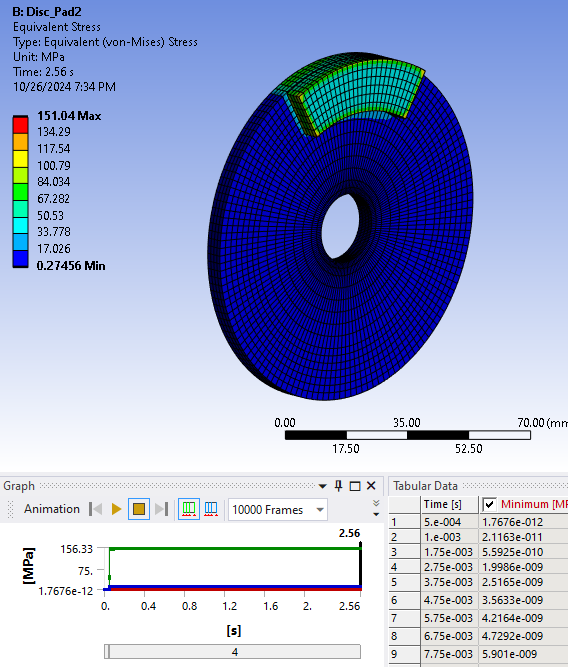
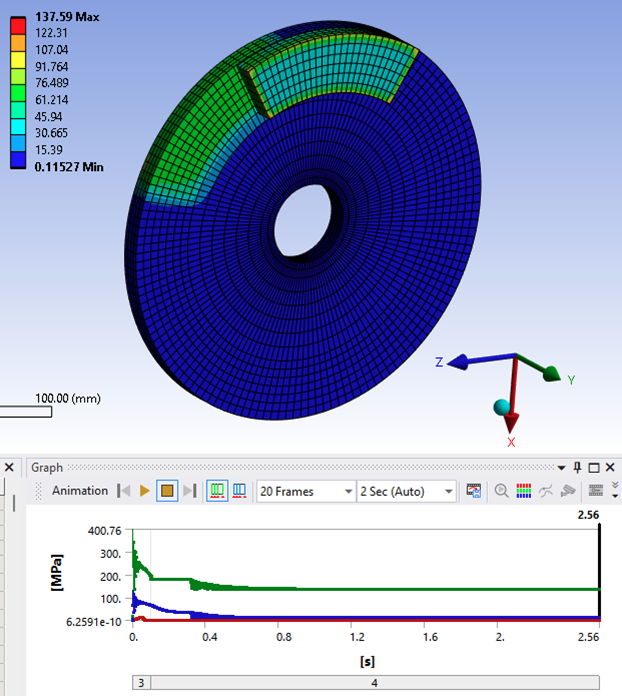
Equivalent stress as shown below-
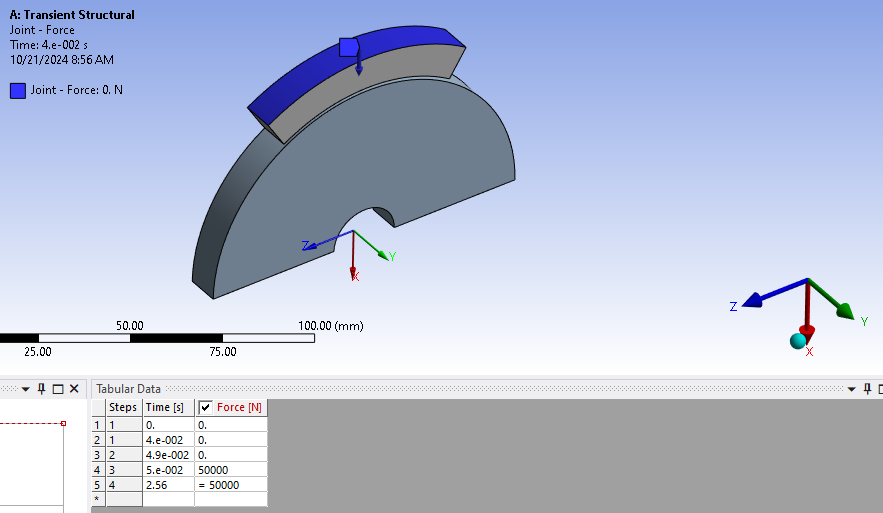
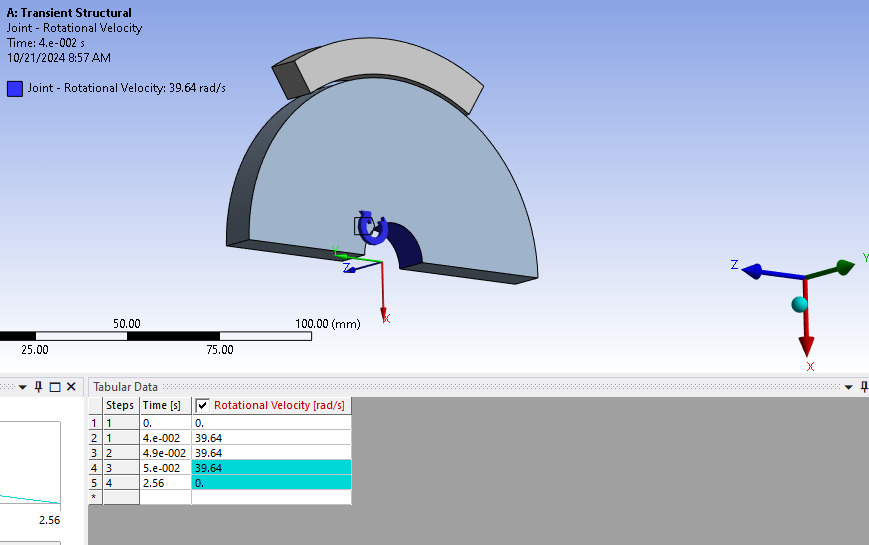
Joint probe as shown below-
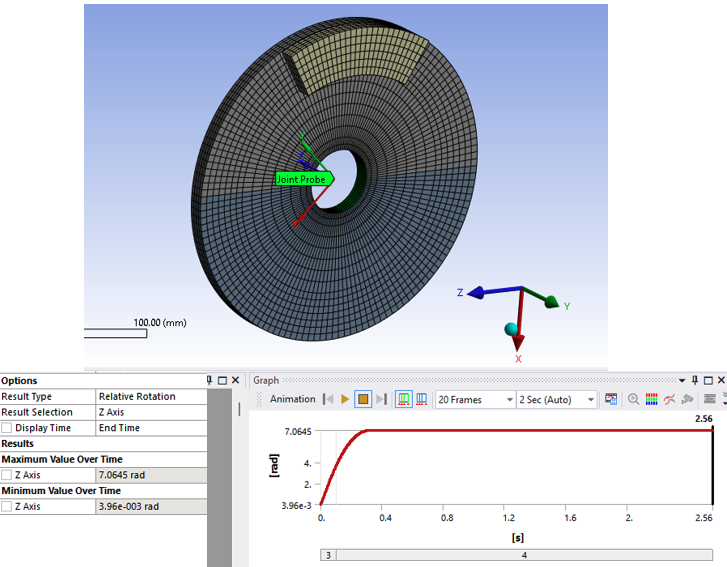
This result is obtained for modified density after multiplying by a factor of 1000.
I've also tried a coupled field transient for this disc brake. I have kept time integration off for the first load step.
I have got a list of messages after the run as follows-

I am getting an error as follows-
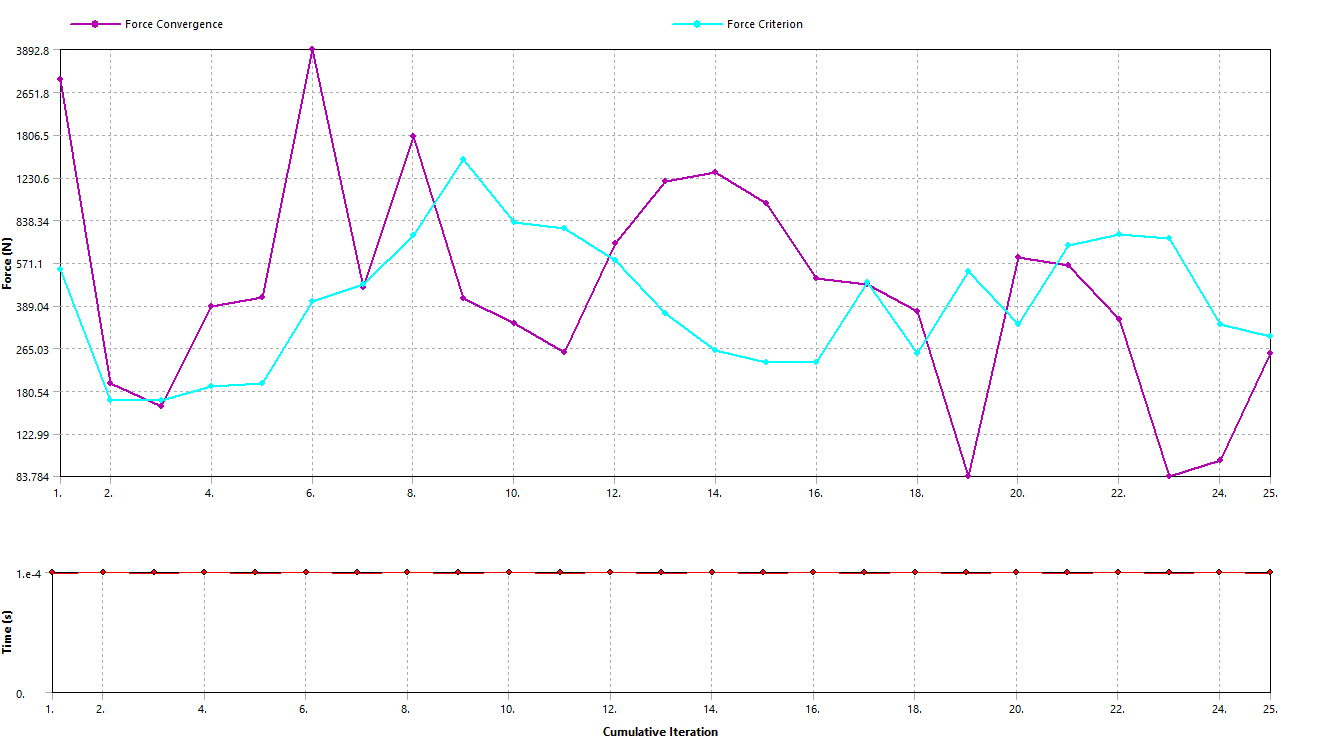
The error is as follows as per solution output-
*** ERROR *** CP = 2216.203 TIME= 00:00:33
Solution not converged at time 1.E-04 (load step 1 substep 1).
Run terminated.
Before the above error, a warning is seen as follows-
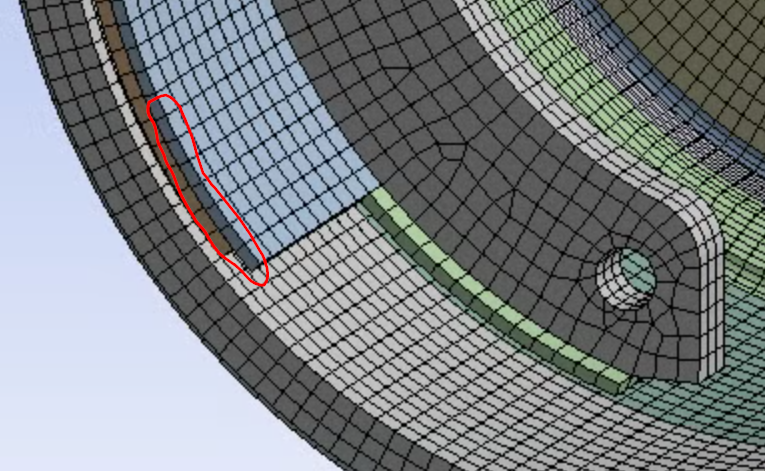
Contact element 20199 (real ID 6) status changes abruptly from contact
(with target element 21278) -> no-contact.
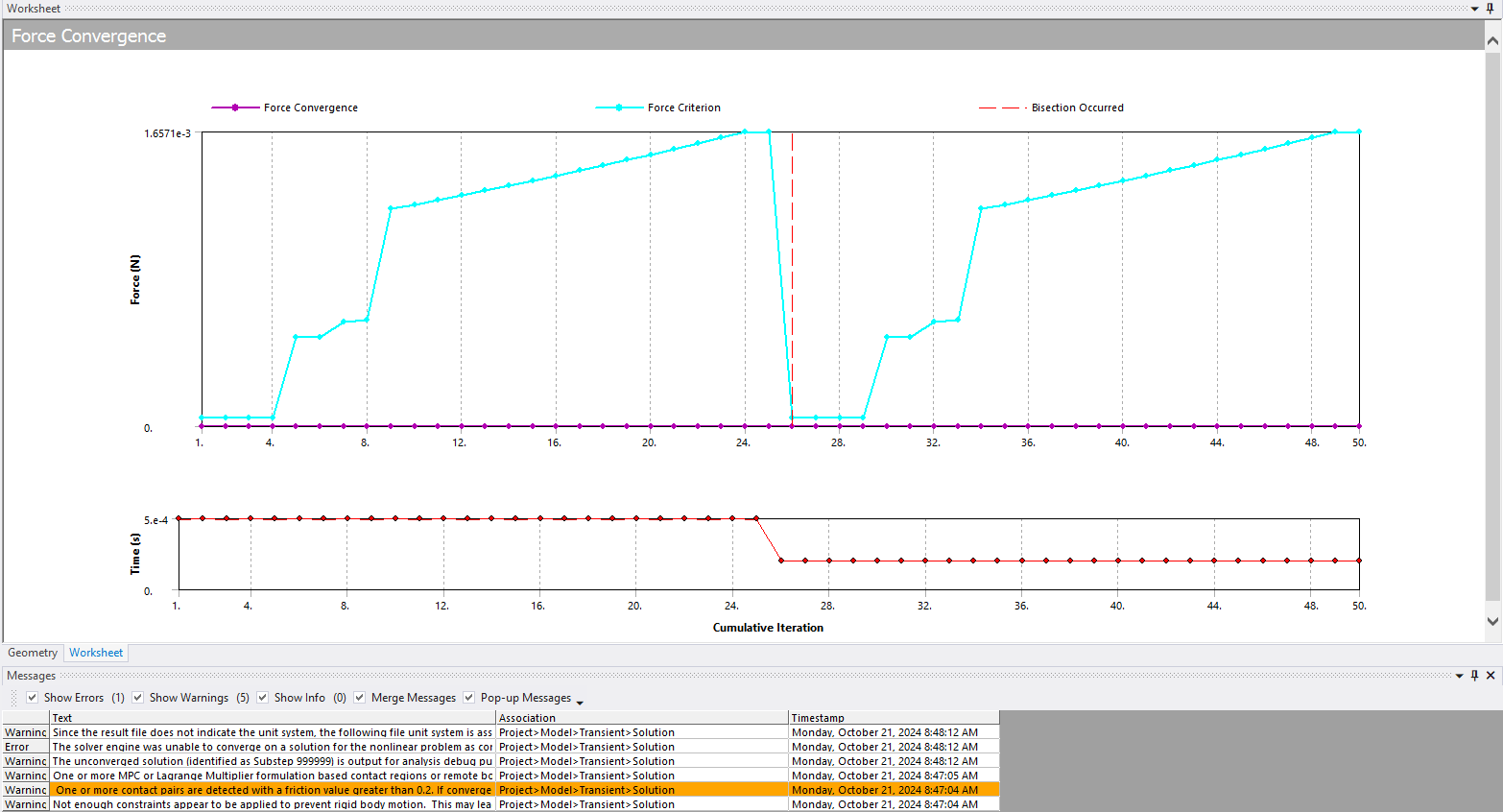
The force convergence plot does not show the substeps converged,
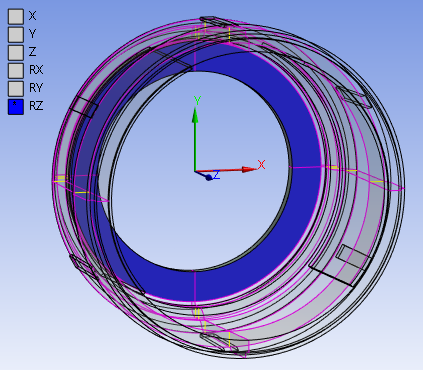
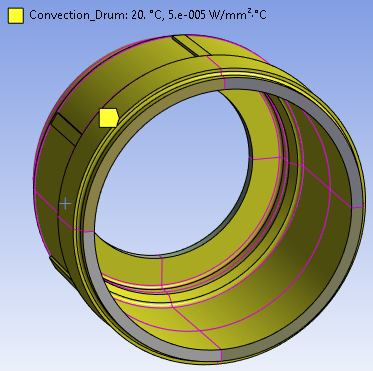
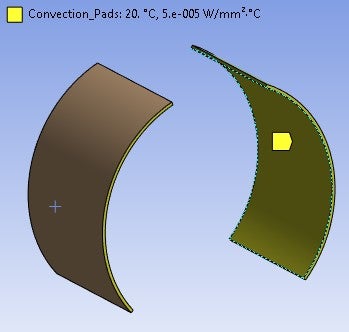
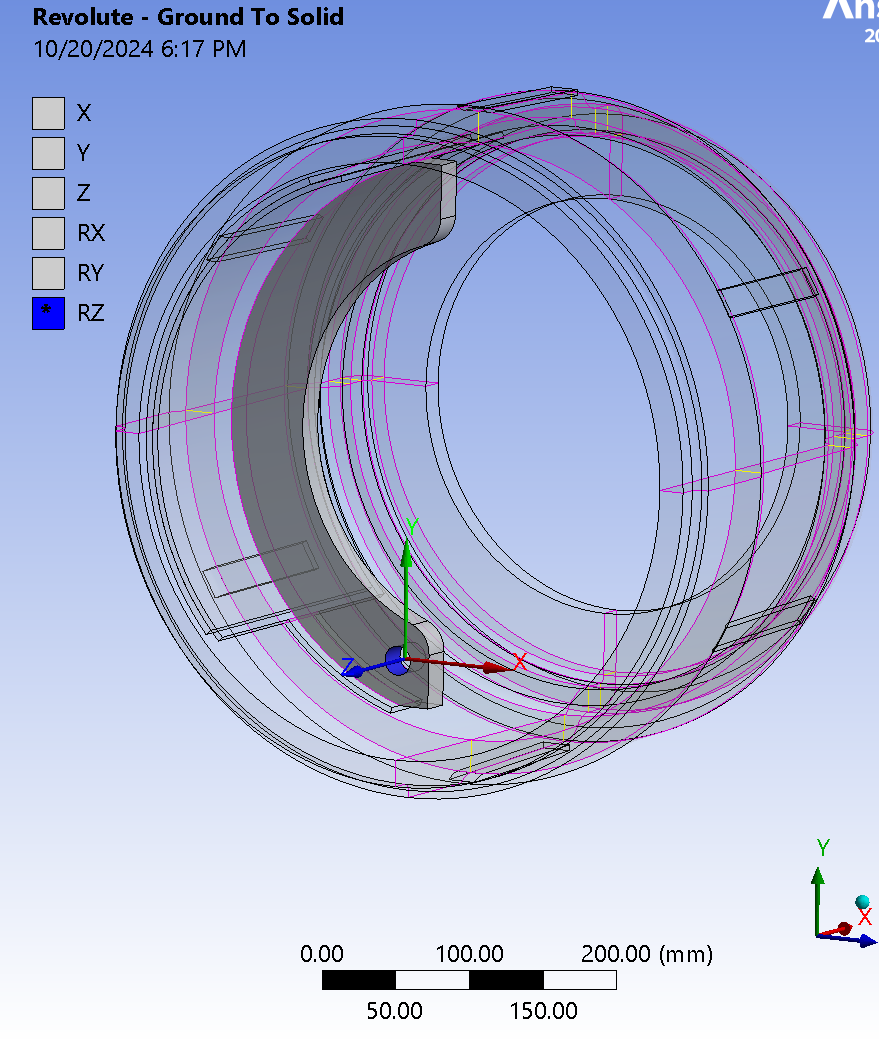
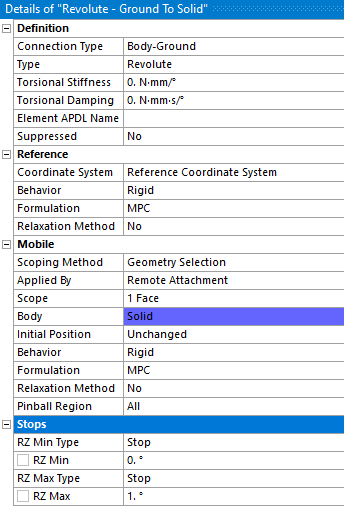
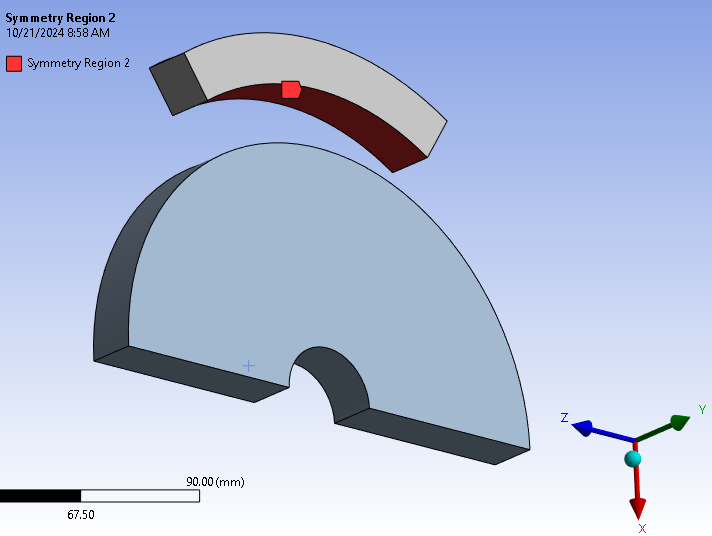
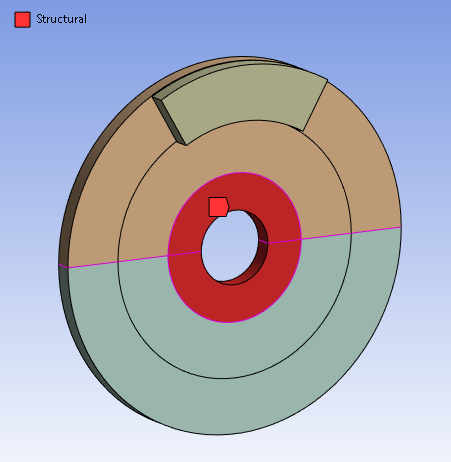
Two physics region have been defined as follows-
Structural-
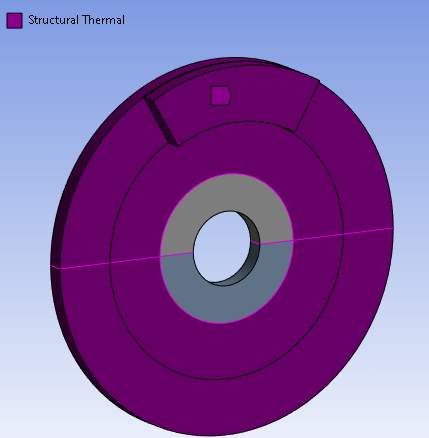
Structural- Thermal -
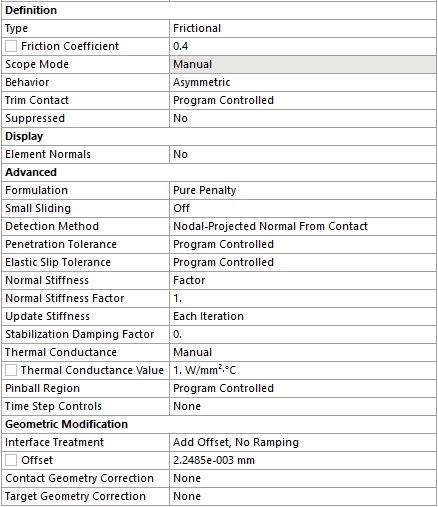
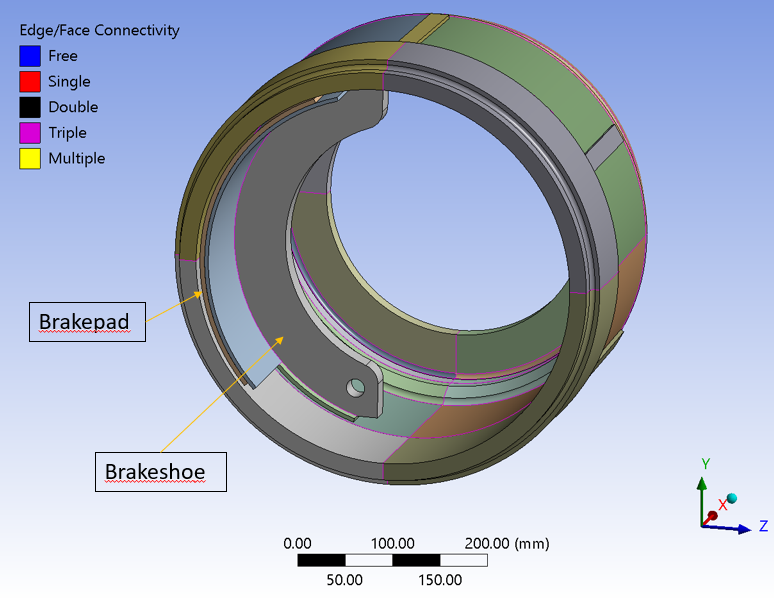
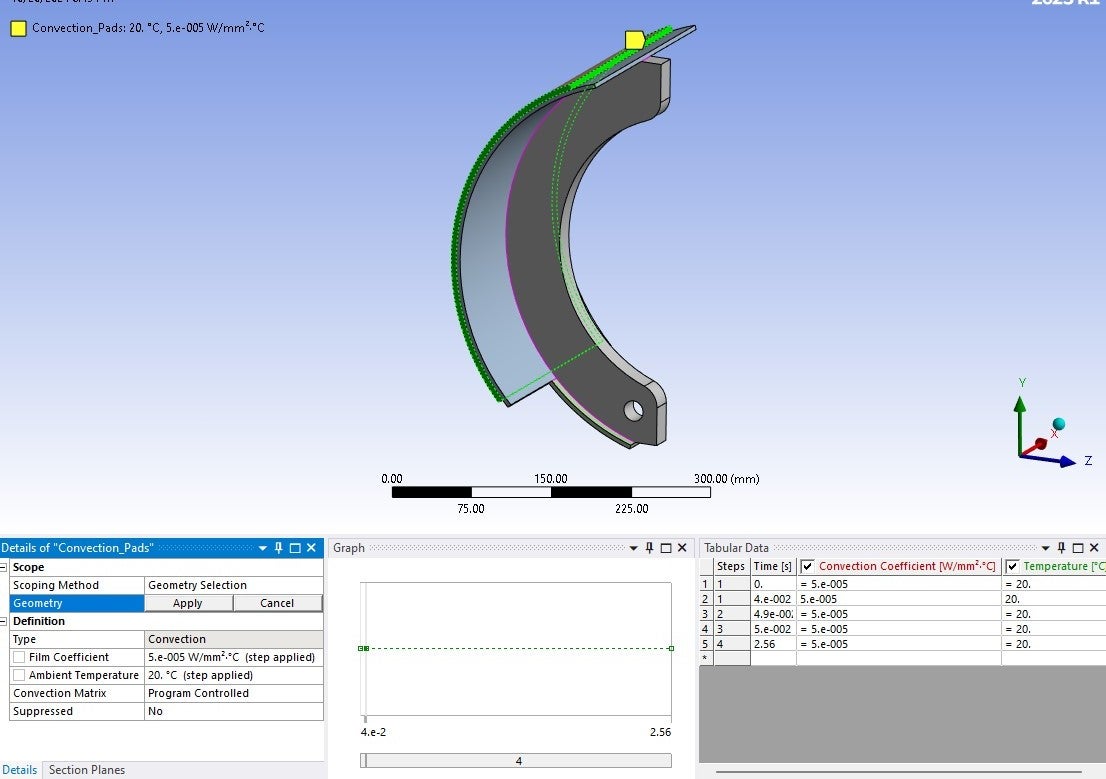
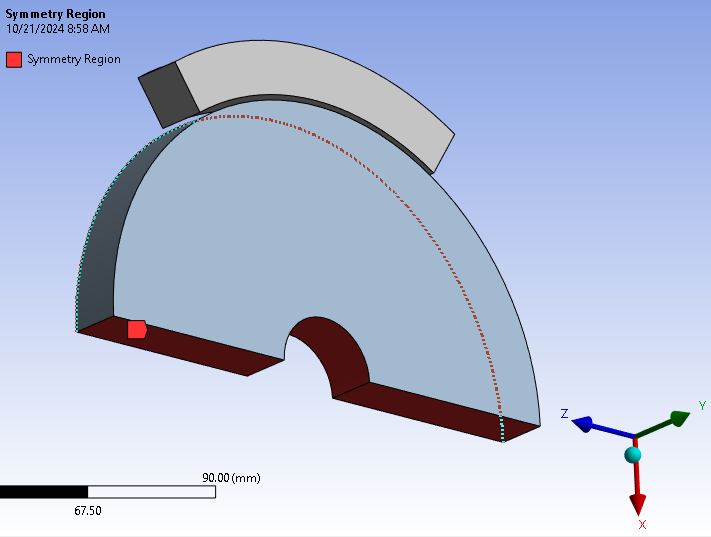
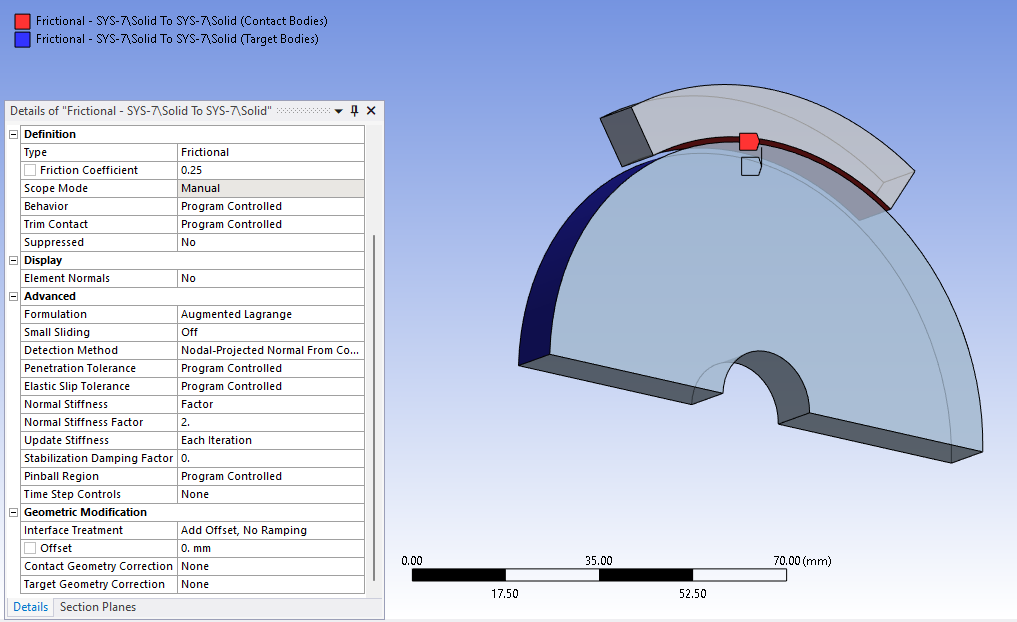
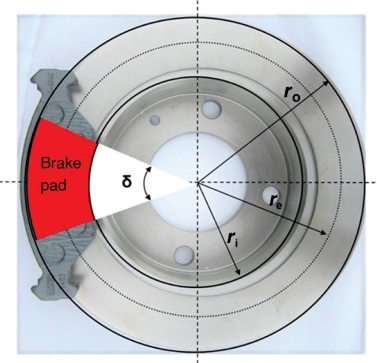
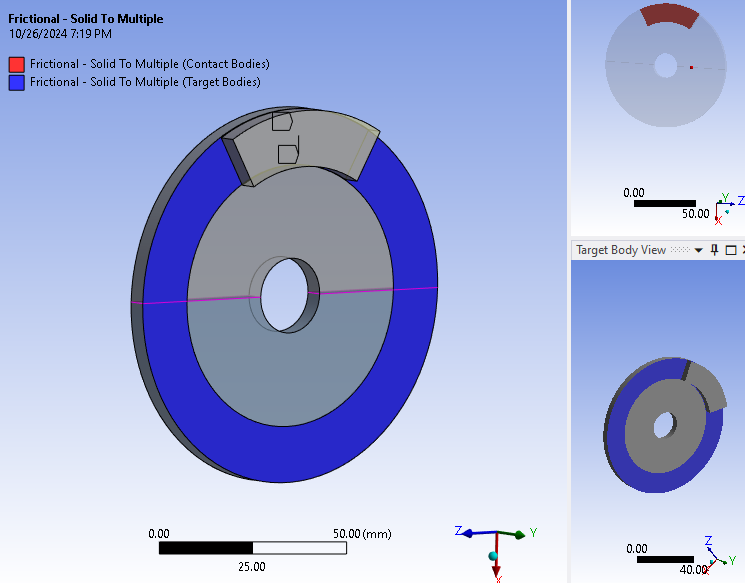
The frictional contact details are as follows-
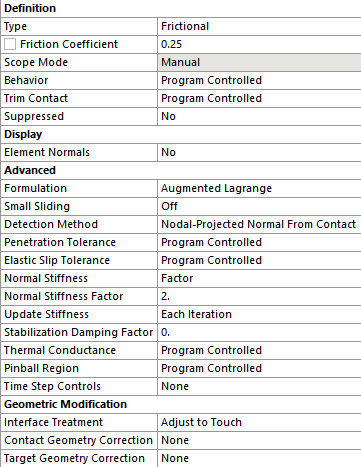
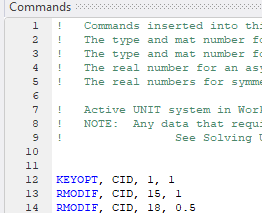
I have also applied command snippets as follows-
Frictional contact-
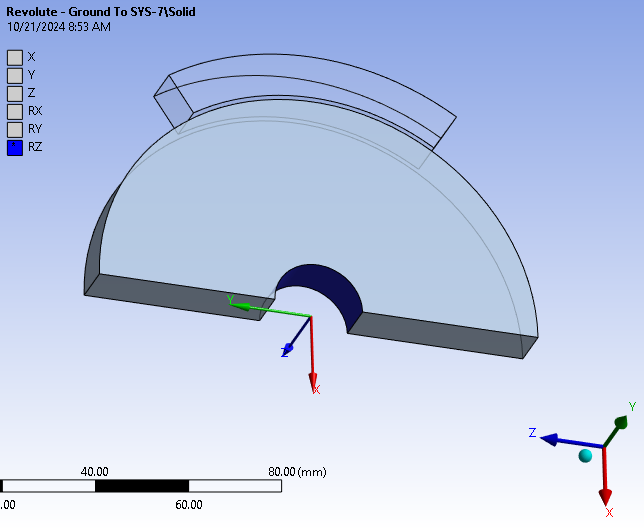
Transient analysis-
Any suggestions for resolving these issues?
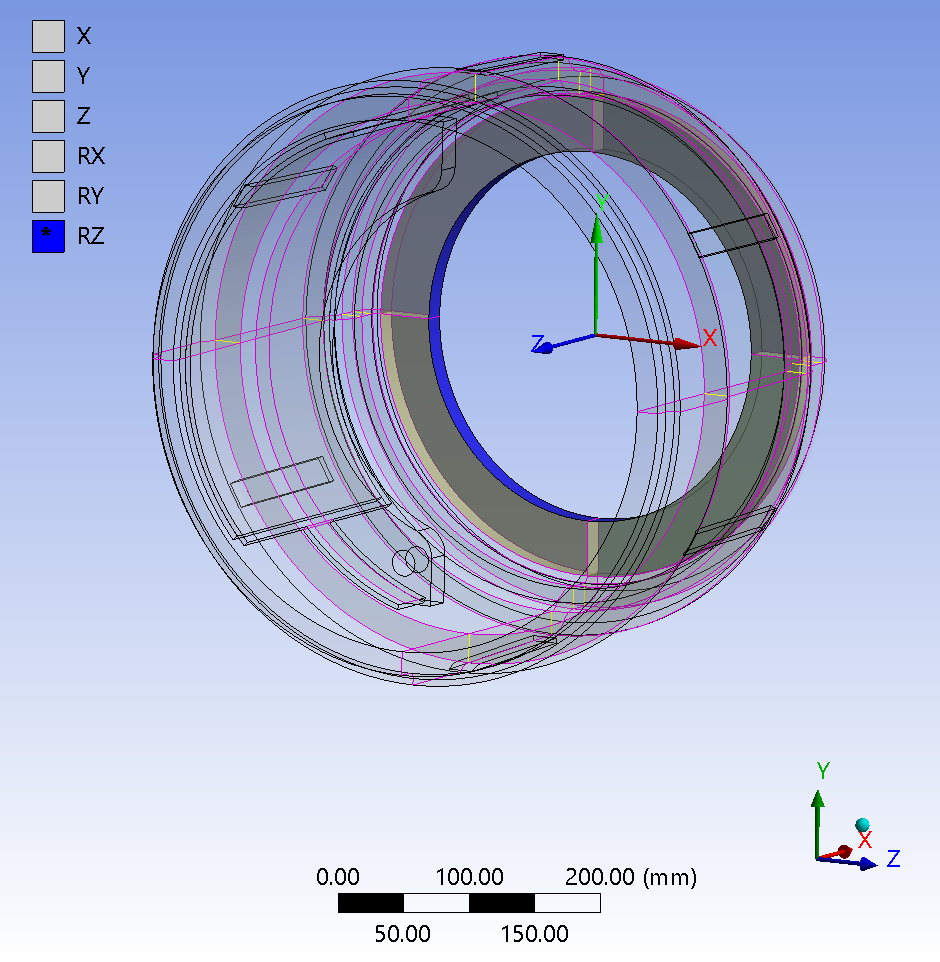
Another point, I would like to know how to get a temperature distribution in transient structural due to frictional braking?
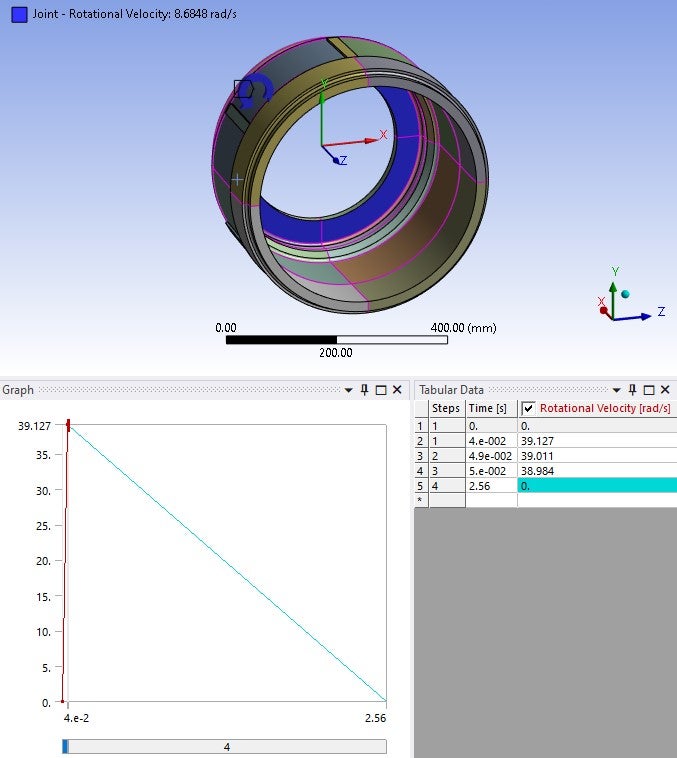
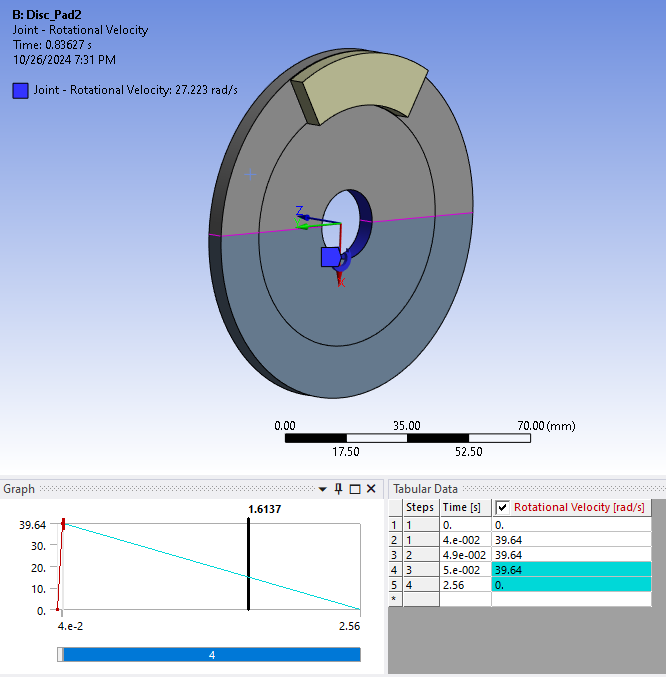
As you mentioned, after increasing the density I could observe the rotational velocity increasing in the first load step after turning off time integration. So thank you for that suggestion.
Looking forward to your reply,
Regards,
Rohan.