Ameet,
Create a Static Structural analysis.
Define Frictional Contact between the ID of the pipe and external faces on the polyurethane cup.
Under Analysis Settings, turn on Large Deflection. Turn on Auto Time Stepping and set the Initial Substeps to 100 and the Minimum Substeps to 100.
Insert a Contact Tool under the Connections folder and Evaluate Initial Contact Status. You should see the contact is Closed, with the expected penetration.
Depending on the geometry, you might get lucky and during the solve, the penetration will resolve itself automatically. That would be great.
If you are not that lucky, implement a three-step solution and insert a Contact Step Control and a negative radial displacement load on the cup edge. To make a radial load, you need to create a Cylindrical Coordinate System. During Step 1, the contact is set to Dead (Deactivated), while the negative radial displacement is ramped from zero. This pushes the cup inside the pipe. During Step 2, the contact is set to Alive (Activated). During Step 3, the radial displacement is deactivated. An alternative is to replace the radial displacement with a pressure load to compress the cup and step 3 can ramp the pressure down to zero.
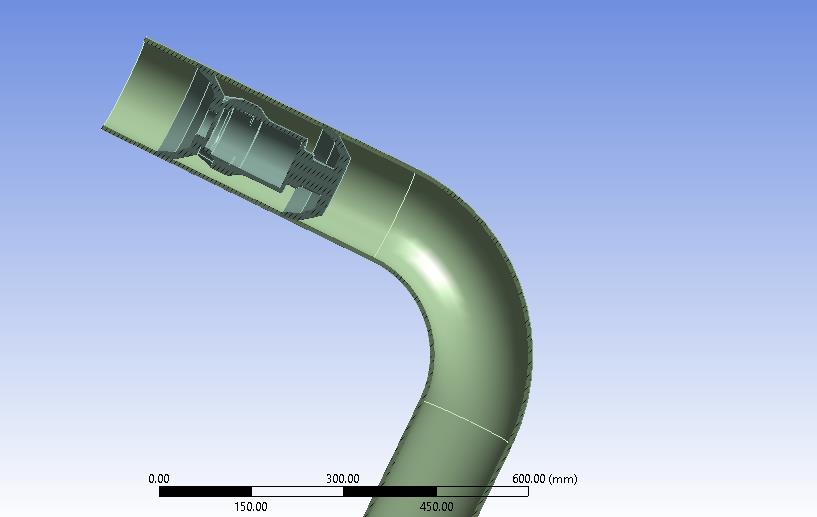
Please insert an image of the cross-section of the assembly in your reply. If the loads and the geometry are perfectly axisymmetric, you can reorient the axis to be along the Y-axis, and take a radial slice in the XY plane and just keep the geometry on the +X axis. Then instead of solids, you will have surfaces on the radial slice. You can build your whole model this way and get a solution with much less time and effort.