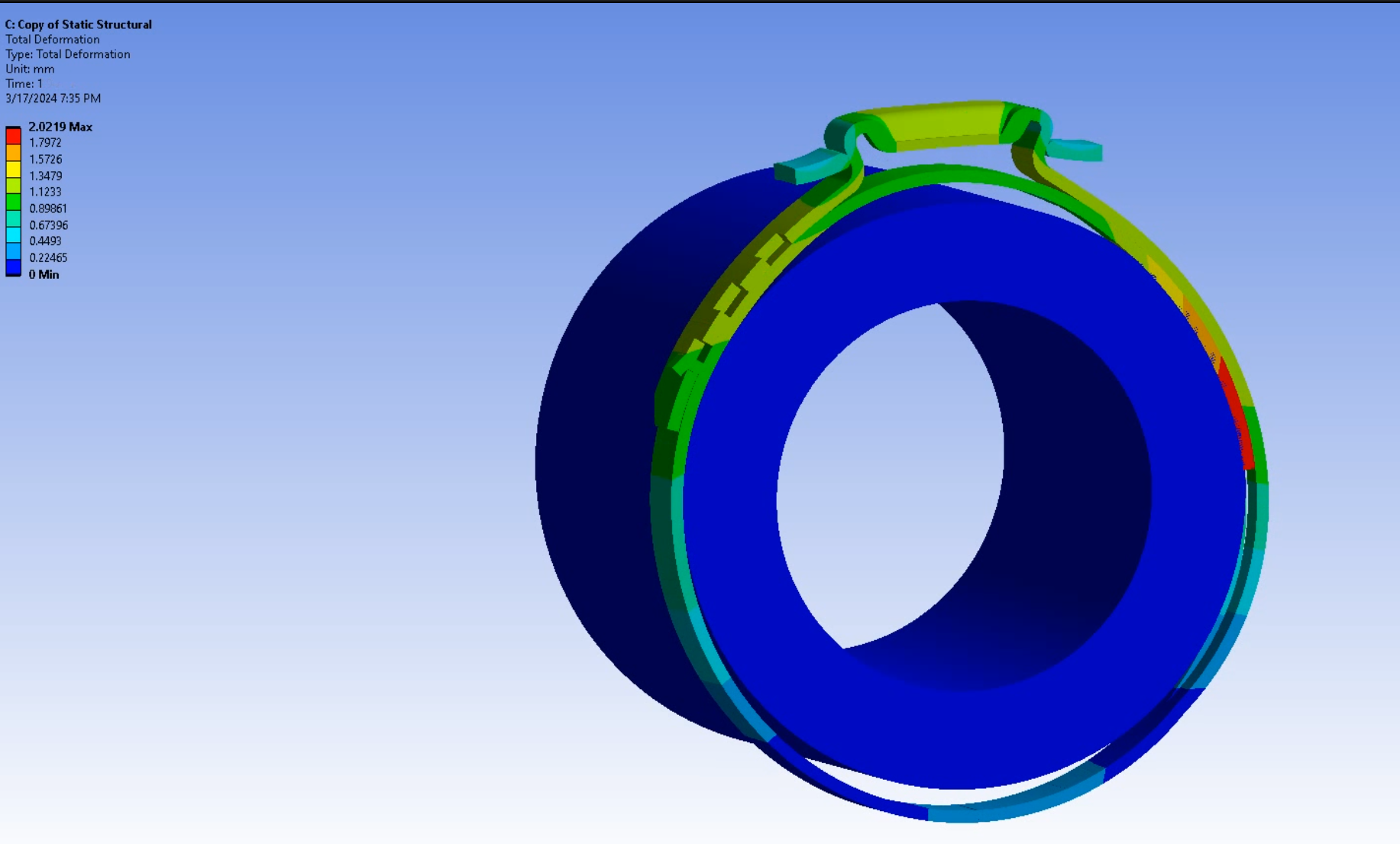
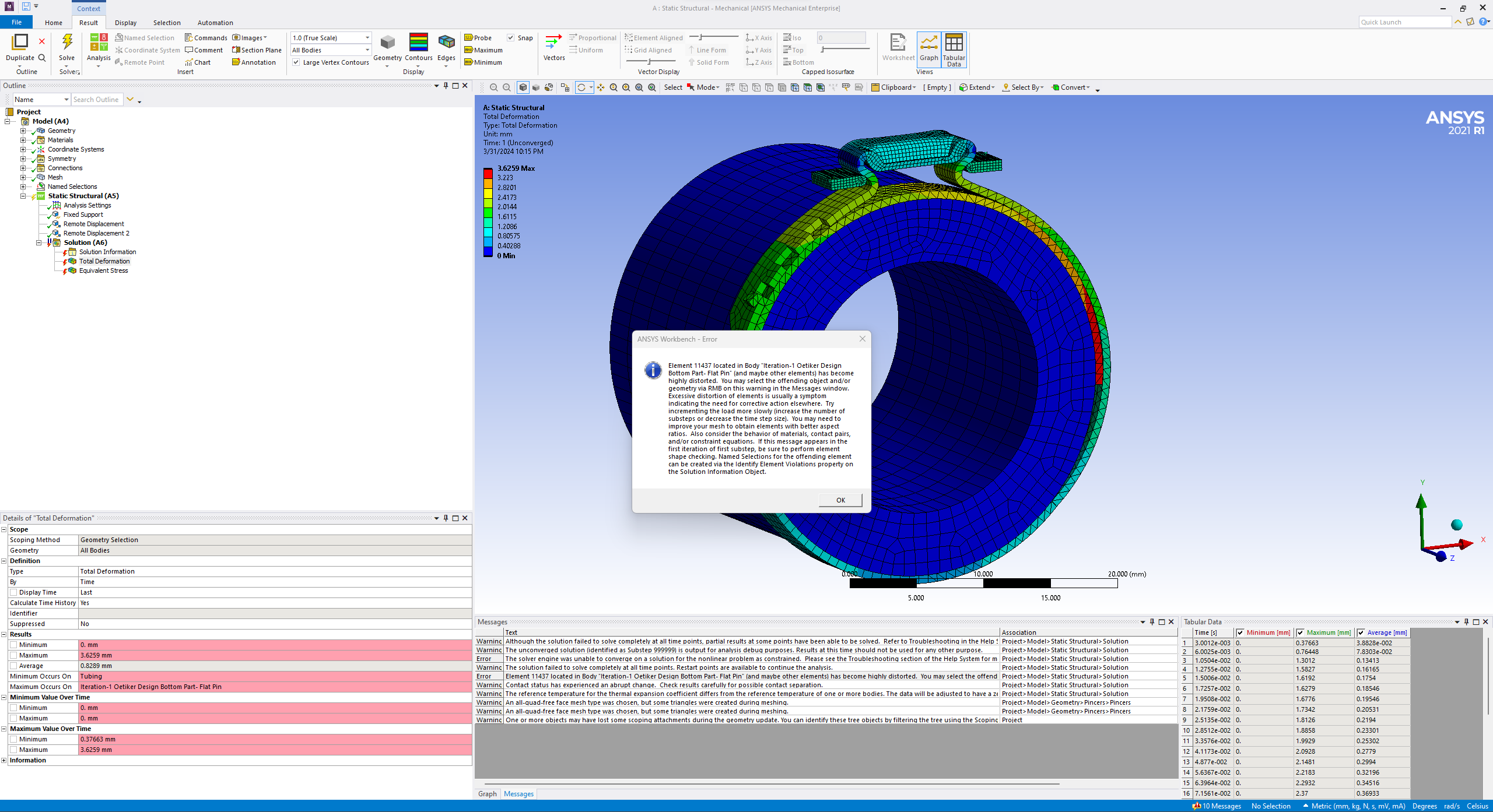
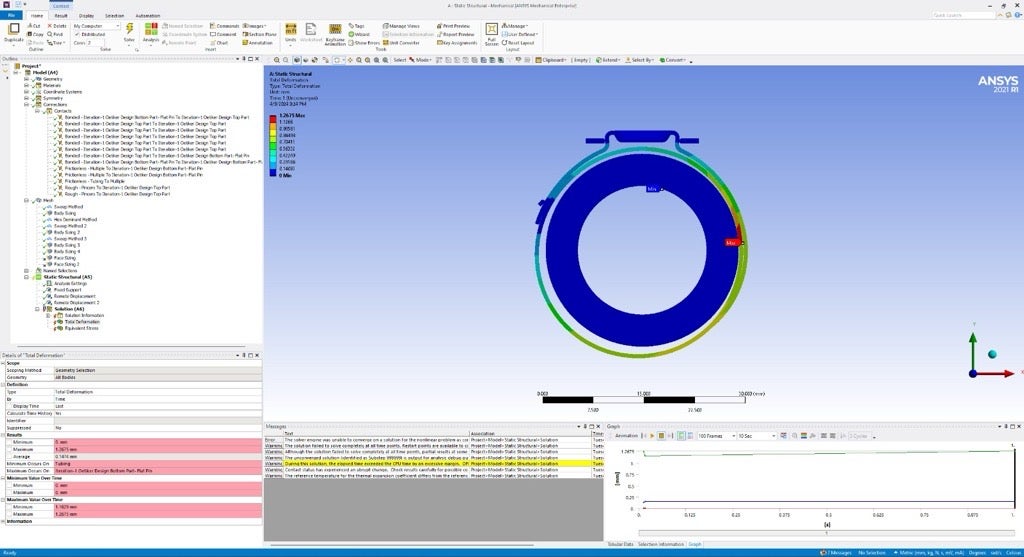
All the steps that were computed are valid. The simulation nearly got to the end time, so if that is good enough, you can ignore the small amount of the simulation that did not compute.
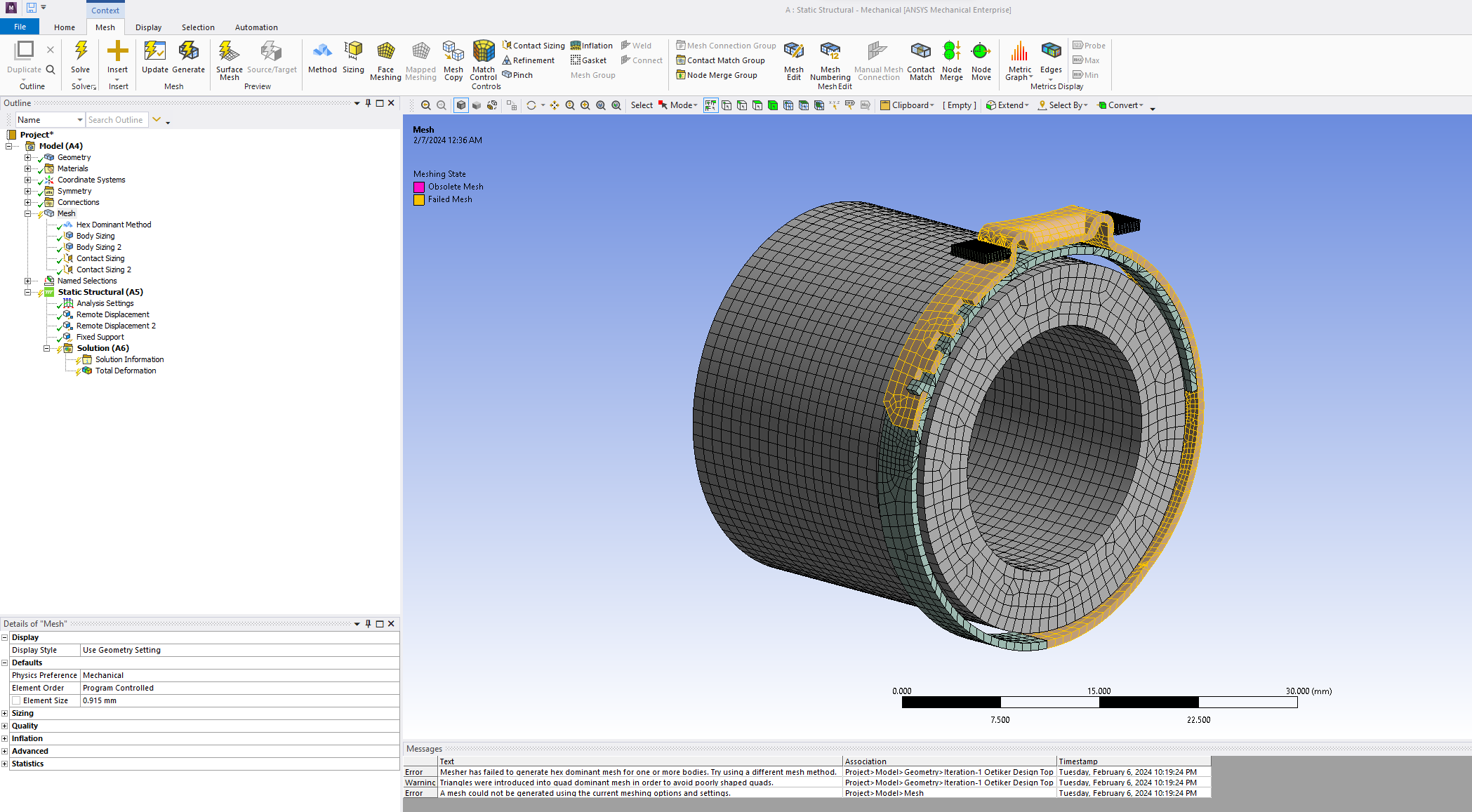
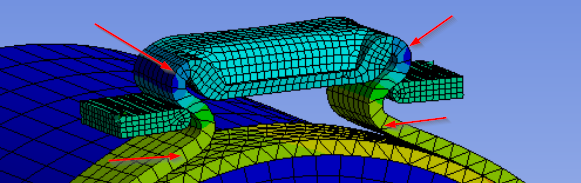
If you want the simulation to converge to the End Time you specified, remesh and put more than 1 element through the thickness between the arrows.
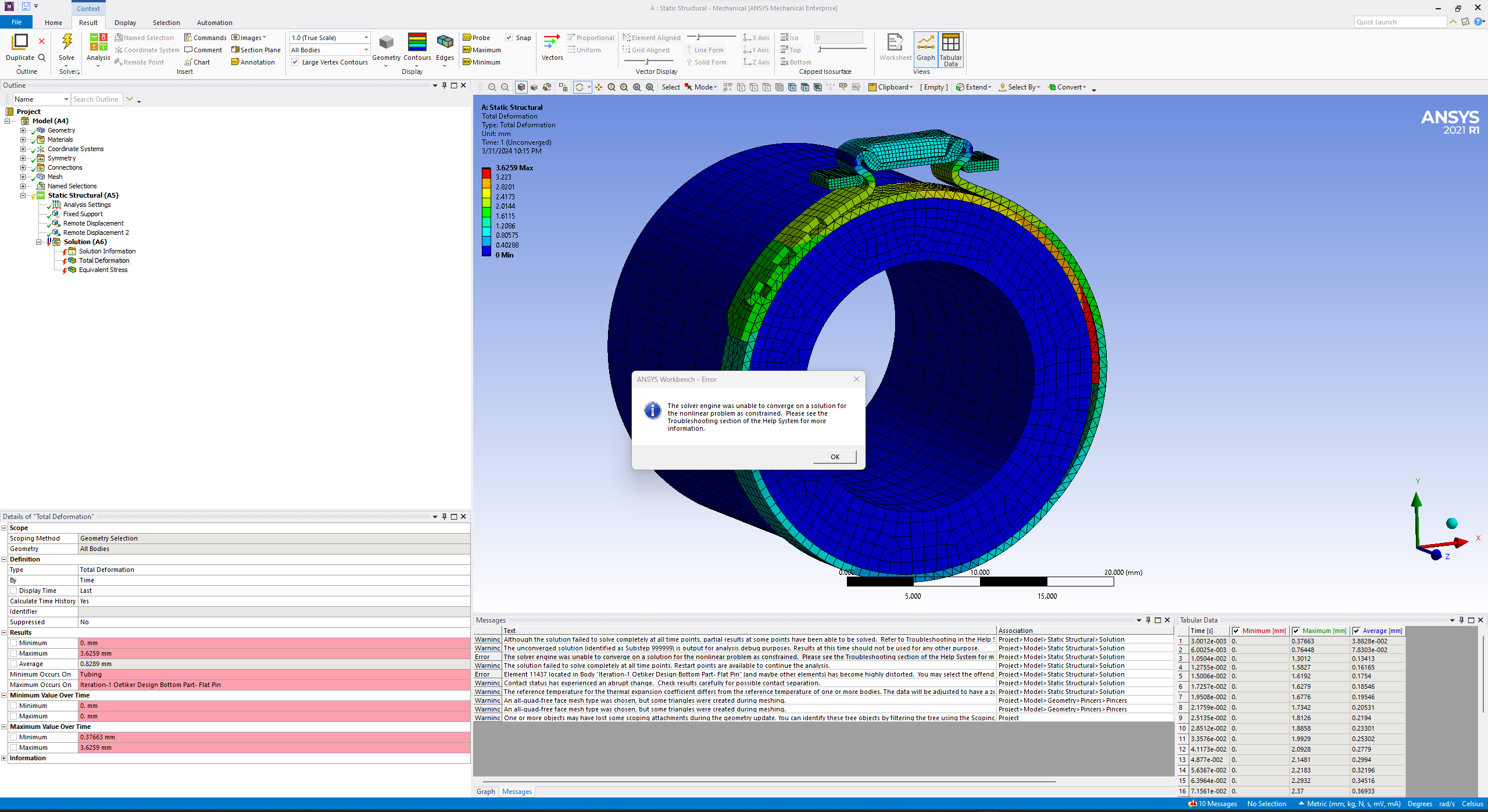
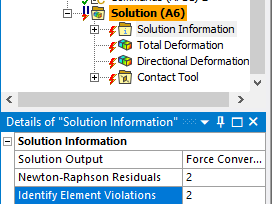
Under the Solution Information folder, type a 2 in the bottom two rows shown below. After a Solve, the highly distorted elements will be in a Named Selection, making it easy to see where in the model the elements with the error are located. You can improve the mesh in that area.
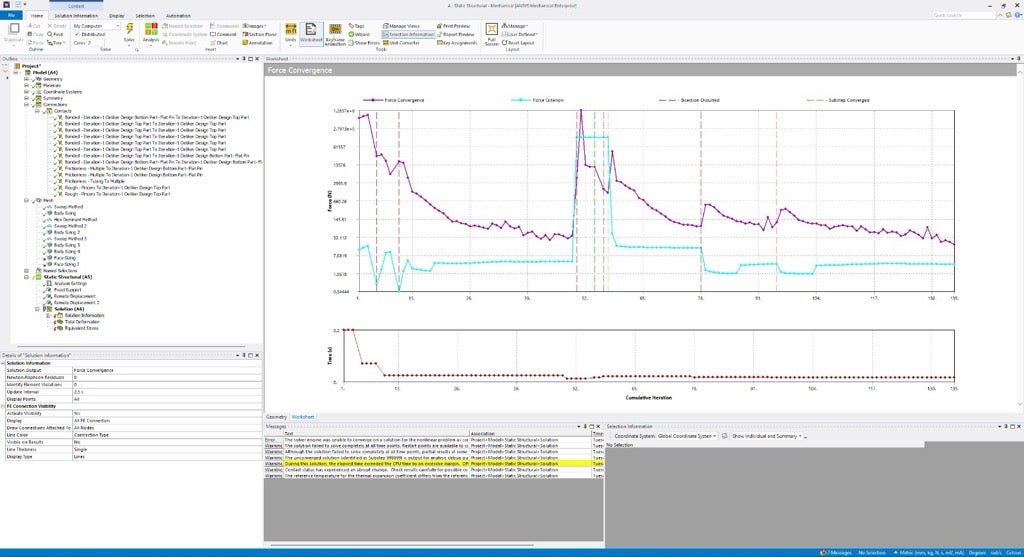
The error suggests to increment the load more slowly. Make the Analysis Settings a 2 step analysis where step 1 has an end time of 0.9 since it converges up to that point, and the new step ends at 1.0 but the Step Controls for step 2 will have an Initial and Minimum number of substeps of 50 and a Maximum of 1000. That and the better mesh will help it converge to the End Time of 1.0 You also have to edit the load, which is probably the displacement of the pincers and make step 1 be 90% of the original displacment, while step 2 has the original displacement.