Hello Alberto,
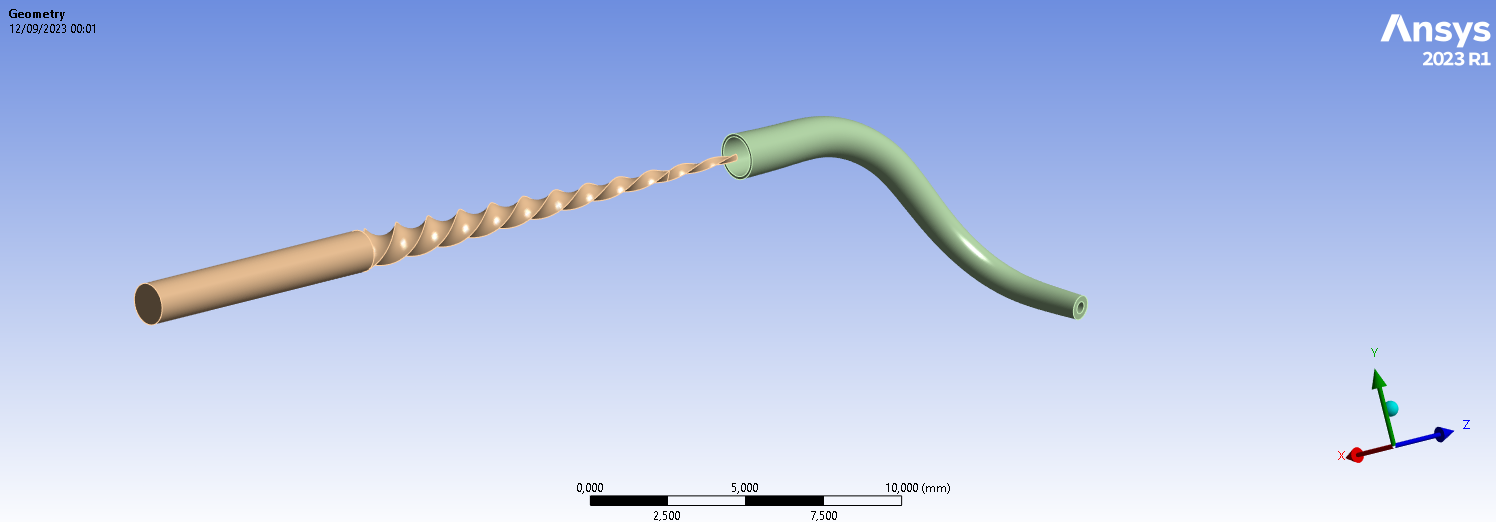
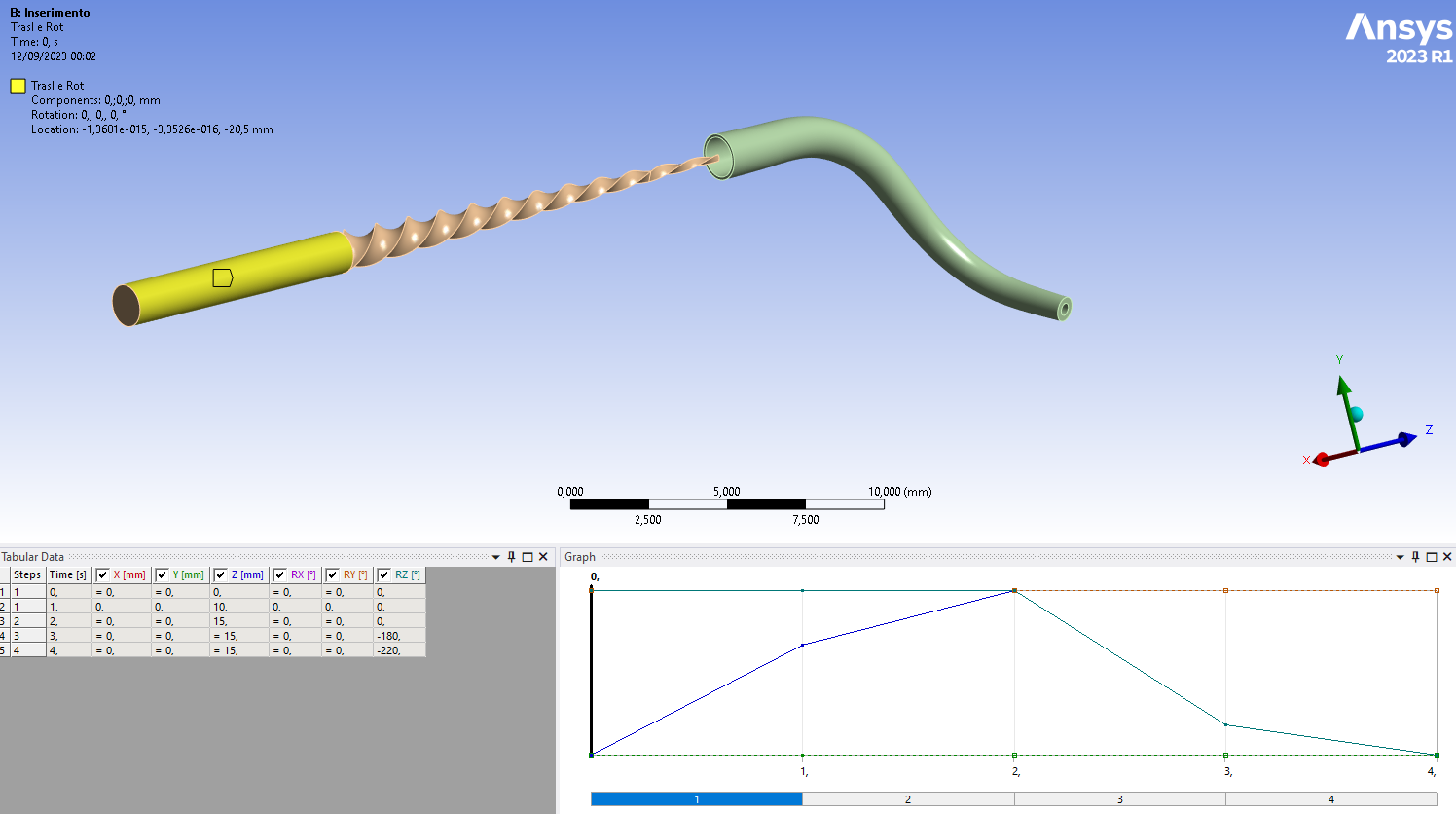
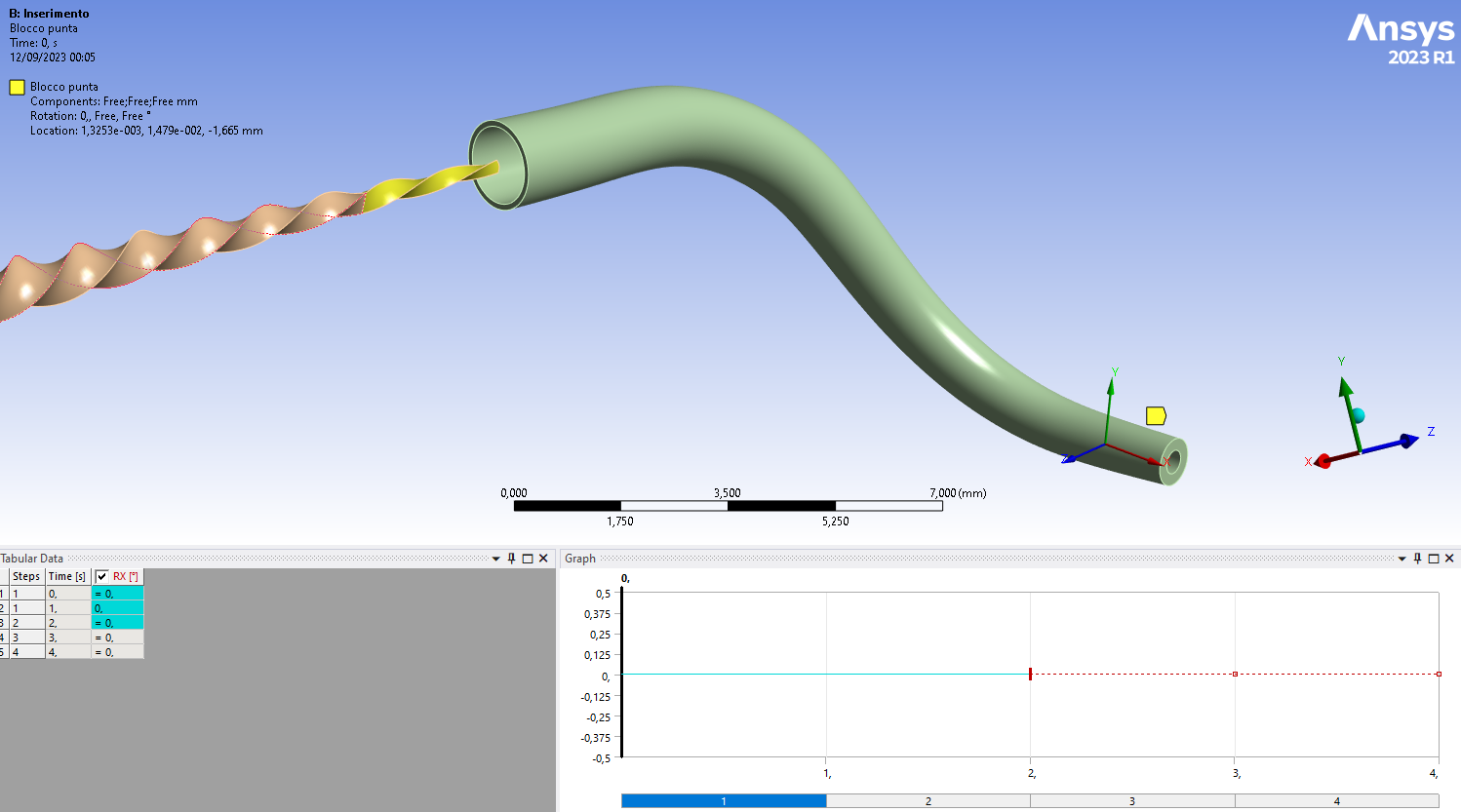
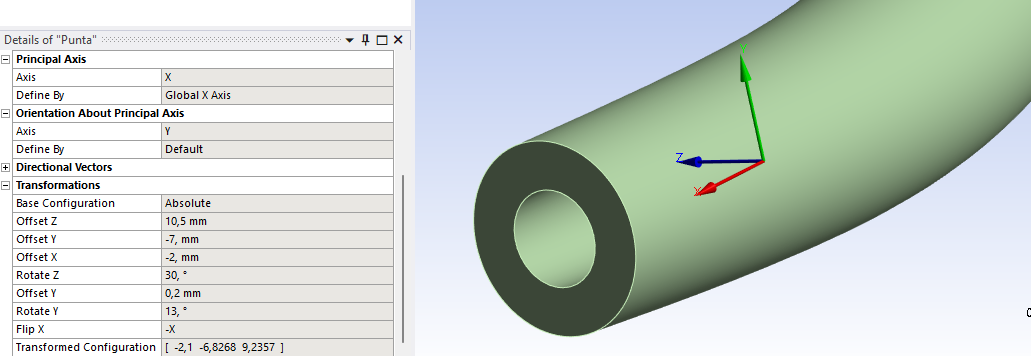
Presumably, you already have large deformation effects active for an analysis like this. The first thing I would do is identify the body in which excessive element distortion occurs (I see something like "Sez_triang_Alt2.part" in your list of messages... is that the tube?). I would also verify that the surfaces involved in the contact between the tool and tube surfaces are properly selected/defined. I might try reducing contact stiffness (maybe significantly... say, by a factor of 0.05) and use the pure penalty algorithm. There are cases when, if the stiffness of the contacting materials are different, the pure Lagrange algorithm is more stable. Some experimentation with different contact detection options might also be necessary. I often have better luck with asymmetric contact... in your case I would declare with tool surfaces to be the "contact", and the tube the "target". Are the tube material properties nonlinear? If so, you might post process the last converged result and see what state that nonlinear material is in immediately before the convergence failure occurs.
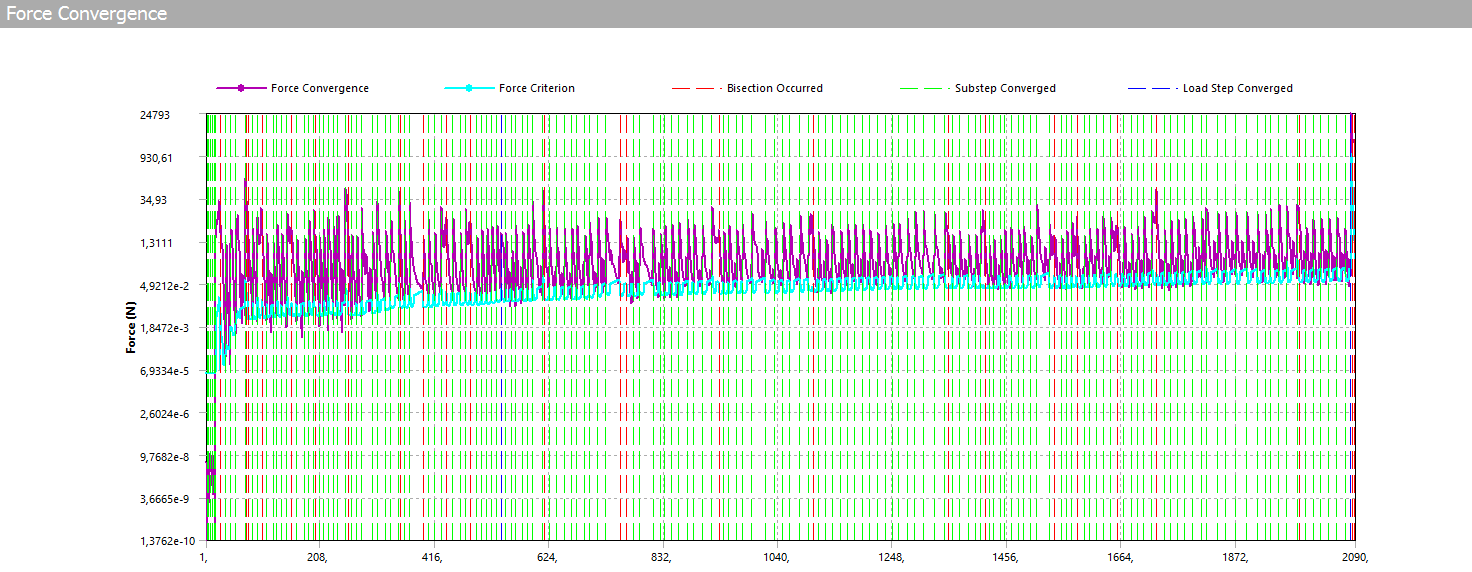
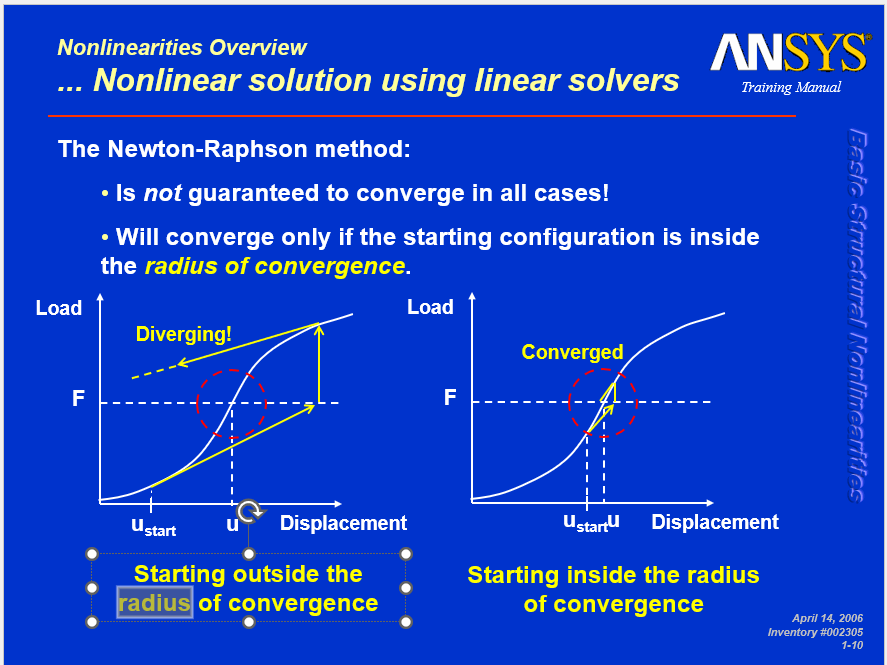
Are you using default "program controlled" convergence criteria? Themessage saying that "The reference convergence value may be less than the threshold" suggests this should be tightened so that excessive disequilibrium is reduced before proceeding to the next substep (which may be allowing the system to progress outside of the "radius of convergence"):
One thing that's kind of a last resort (due to computational expense) would be to solve it as a "slow transient" with an appropriate level of damping. Time integration limits the motion that can occur over a time step, and damping adds further numerical stabilization.
Best,
Bill