Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Failed to Generate the rotation of masses › Reply To: Failed to Generate the rotation of masses
 de.serrano
de.serrano
Hi Peter,
I am sorry if my explanations have not been clear. First of all, with respect to the forces D and C these are to represent the effect of a screw spring system that are located in those holes.

Regarding the rotation of ESM2, it is correct the rotation is with respect to the central axis of that subsystem which is aligned with the Z axis of the coordinate system.
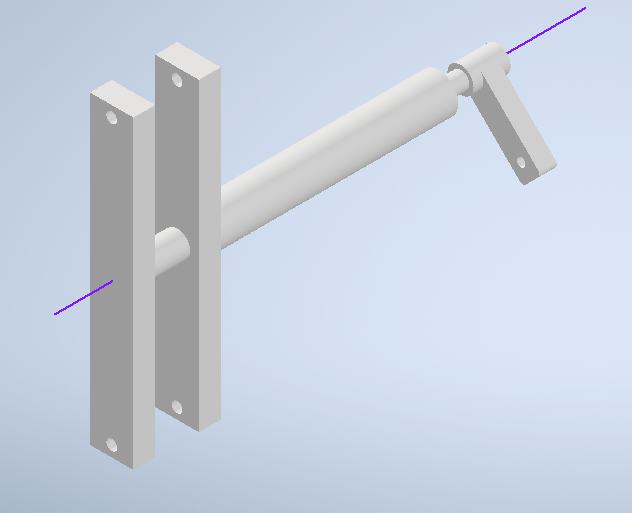

The force E is applied on the lever hole in the X direction to generate a moment and thus generate the rotation of the system.

The objective of the simulation is to estimate the minimum force E to overcome the contact force in the zones of interest (images above) using Direct Optimization. With respect to the remote displacement I also tried applying it to the lever or even directly to the masses.



