Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
March 31, 2024 at 6:22 pm
 ROHITH
ROHITH
Subscriber
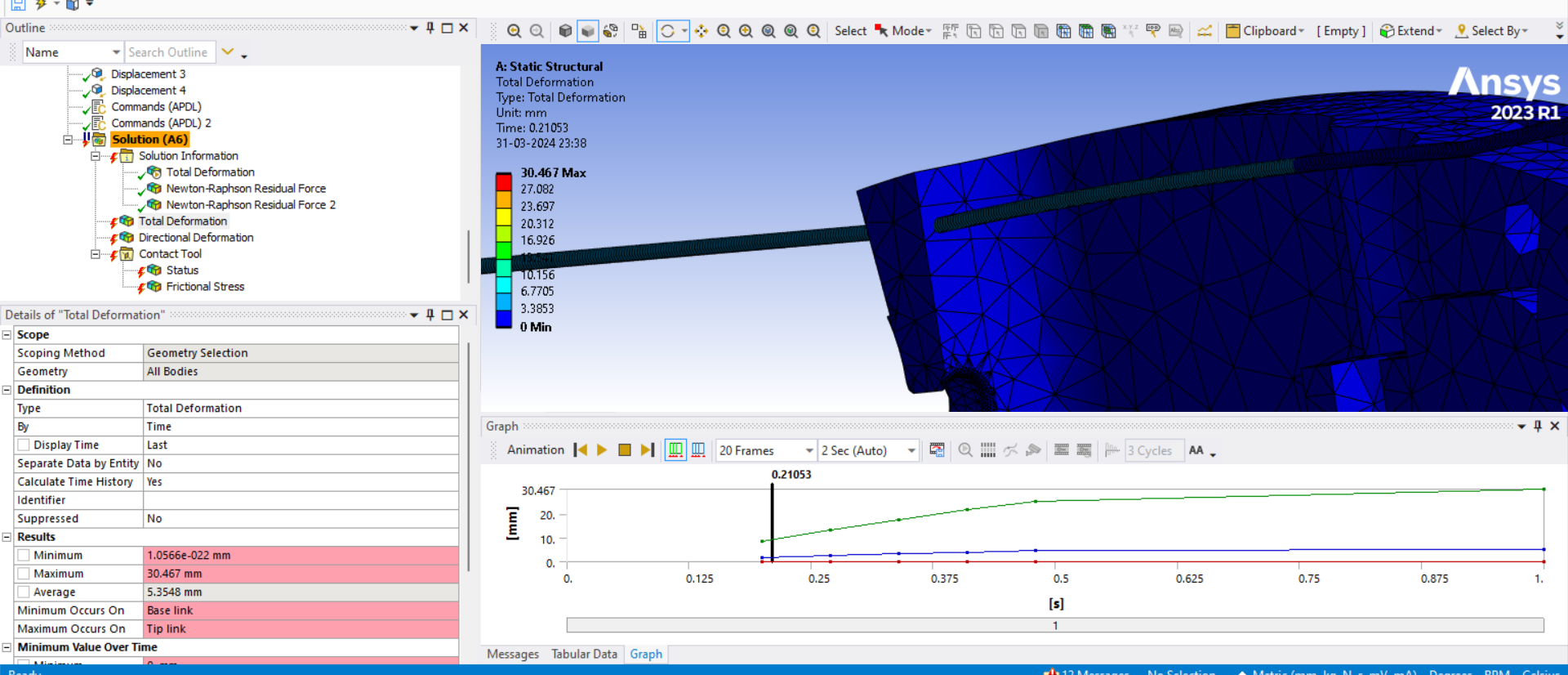
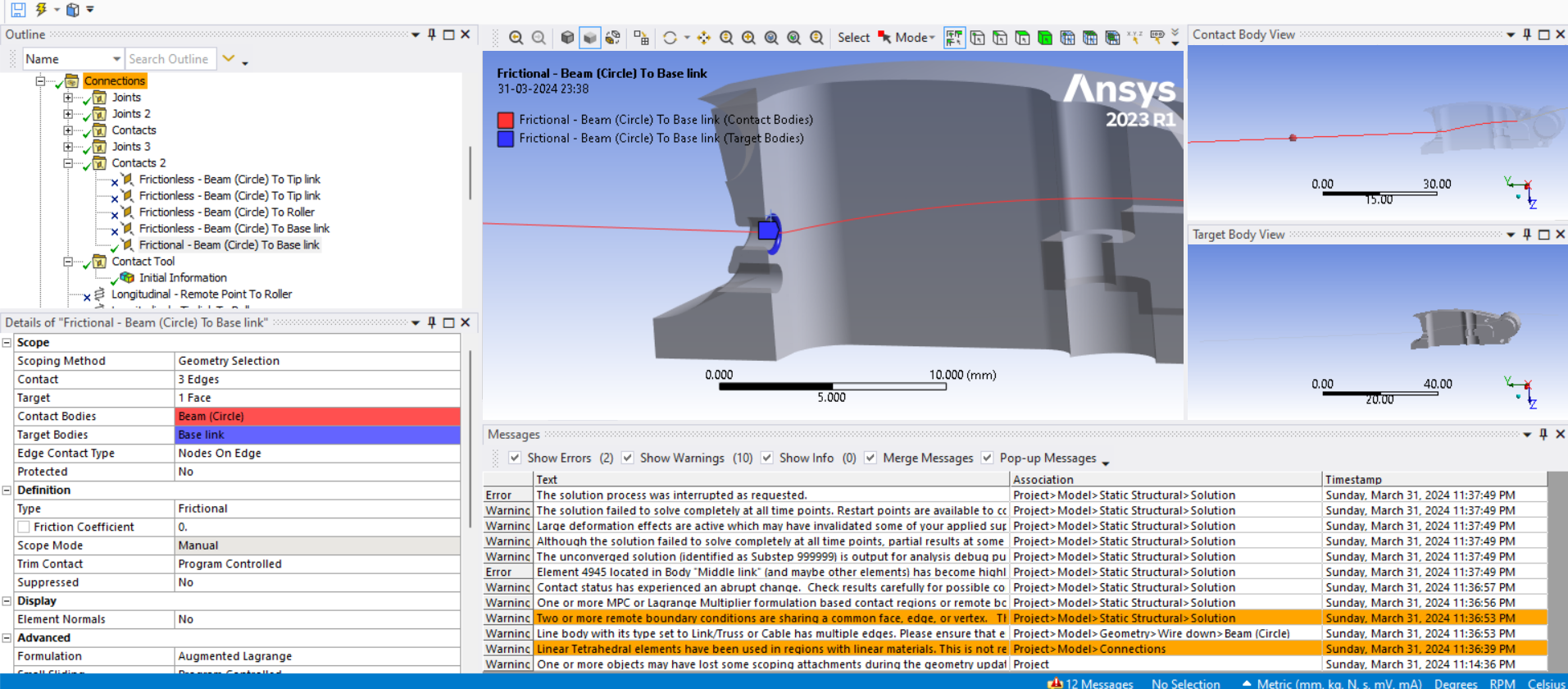
when i was trying to pull the end of the wire that i have model mostly straignt and tangent to surface it is penetarting into the link and the contact status is closed in initial condiction what could be the reason for this kind of behaviour could you just check this once wire model