Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
 peteroznewman
peteroznewman
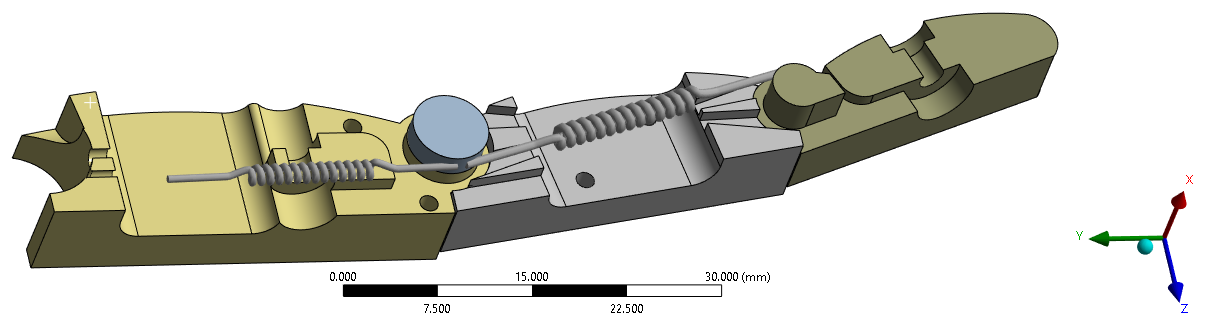
Below is the method of using springs. This is the one that easily converges and provides the tension in the wire for an applied load. The springs attach at the tangent points.
There is a tip load of 9.8 N. The Displacement is X=0 to support the tip because I cut the model in half. The Remote Displacement pulls on the spring to lift the finger tip.
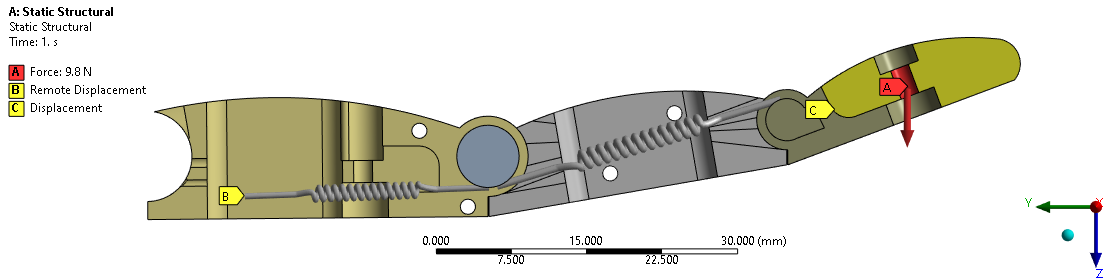
Frictionless contact prevents middle link from back bending.
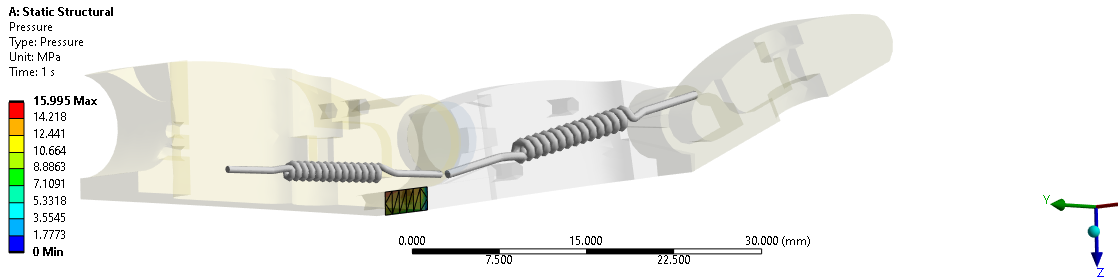
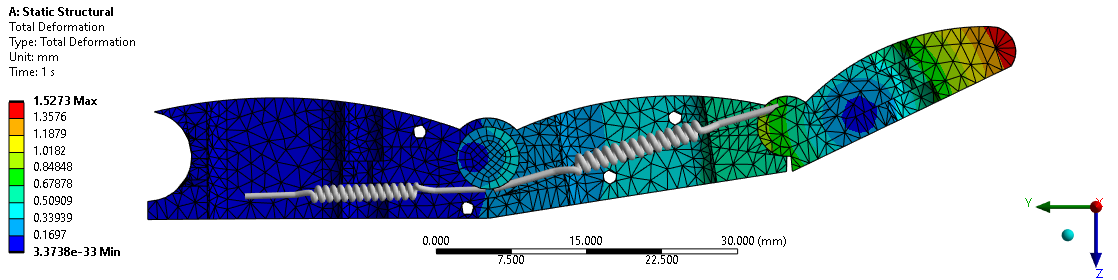
The spring probe shows the springs need 54.77 N of tension to lift the 9.8 N on the finger tip.
Here is the ANSYS 2023 R1 archive of the spring method. I understand you want to see the method of using wires, but that is much more difficult to converge. The wires needed to attempt the wire method are in the archive as suppressed bodies. You are welcome to try it. I don't recommend it for this model.



