Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
 peteroznewman
peteroznewman
Complex models are often assembled using a large number of simple components. I demonstrated how several simple components work.
The component using Link/Truss elements has the benefit of being able to wrap around surfaces and slide on corners but the drawback is they are very difficult to achieve convergence, which can become exponentially more difficult as you add a large number of them into a complex model.
The component using Spring elements has the benefit of very easy convergence and provides the most important information but has the drawback of missing some information which would have to be obtained by other means. However a model with lots of springs is not likely to have convergence problems.
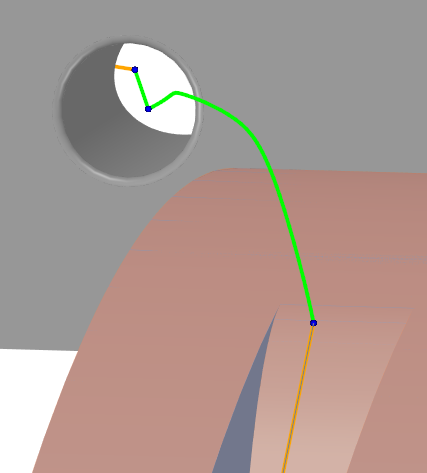
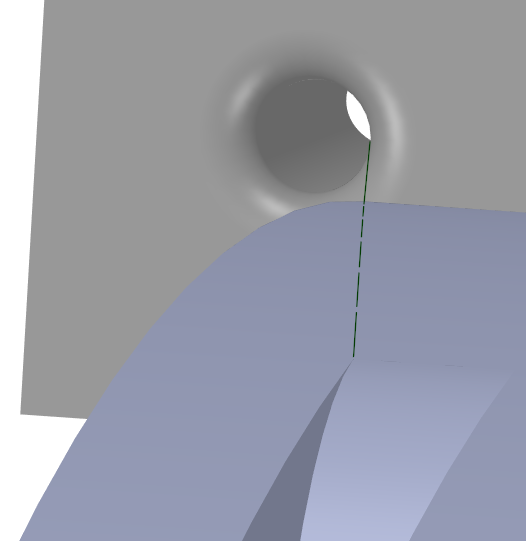
If you really want to use a wire, you must be precise in constructing the wire so that it is drawn tangent to the surfaces it must slide on. Below is the cross-section of the wire. Note that it is not tanget to the surface of the finger and is not tangent to the hole in the fixed part.

The wire must be perfectly straight from one tangency point to the next. You can’t draw any curves unless the wire is in contact with a curved surface, and in that case, the curvature must match exactly. You can’t draw wiggly wire as shown below. The consequence of doing so is that convergence becomes impossible.
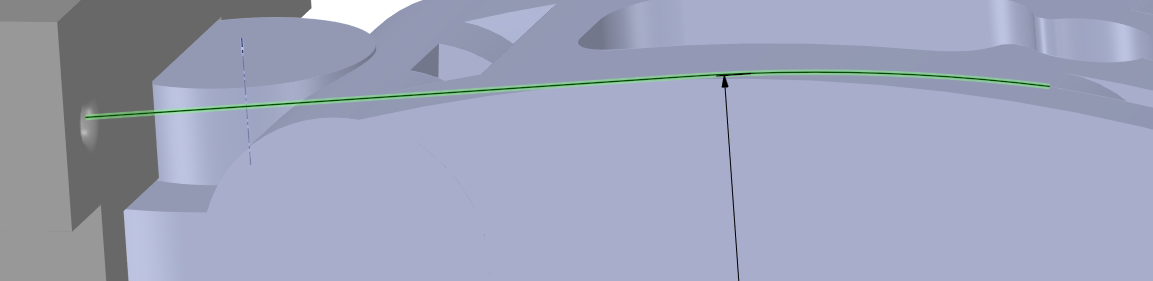
Below is an example of a straight wire that wraps on the surface of the link.
To construct the line on the surface of the link required a lot of geometry construction. First a 3D line from one point to another, then a plane on that 3D line, then split the surface on the top of the link with the plane then extract that curve which is an ellipse, then draw a line from the edge of the hole to the tangent point on the ellipse. That is a lot of work for just one section of one wire.
The nice thing about springs is they are straight lines between two points and even if the end points are not exactly at the tangency point, the solution will easily converge and you will get some useful information.



