Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
 peteroznewman
peteroznewman
Here are the results of a simple model using a spring to determine the tension in the wire when there is a 9.8 N (1 kg mass) on the next joint in the finger. You can see the wire has been replaced with a spring. The spring has a line of action that makes it tangent to the surface of the finger the wire would be tangent to if it were wrapped around that surface and anchored further to the right. The other end of the spring is tangent to the hole in the fixed part.

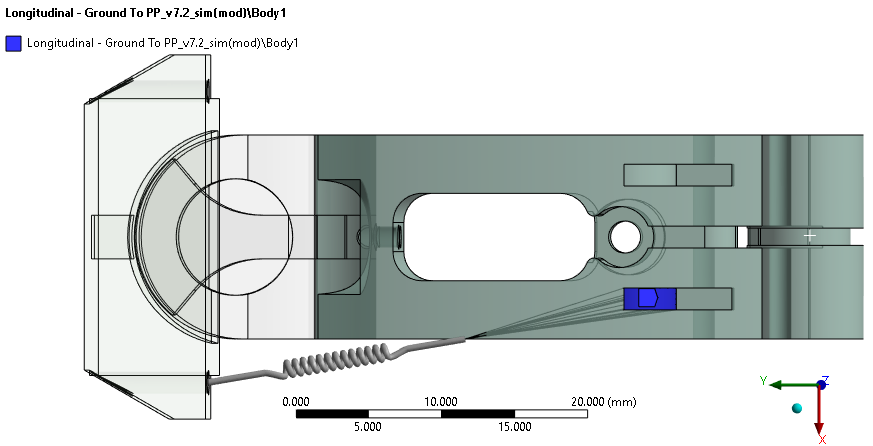
The unknown is the tension in the spring under this load. This simple model quickly calculates this value to be 64.7 N
The spring rate is a large number to prevent large movement of the link so the tip of the link only moves 0.12 mm.



