Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
 peteroznewman
peteroznewman
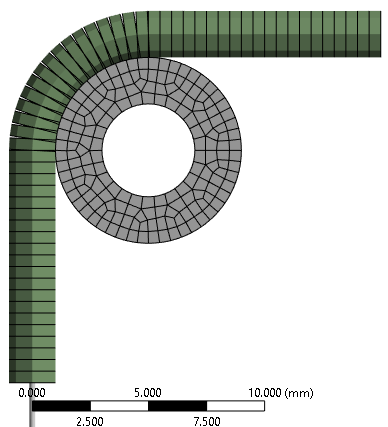
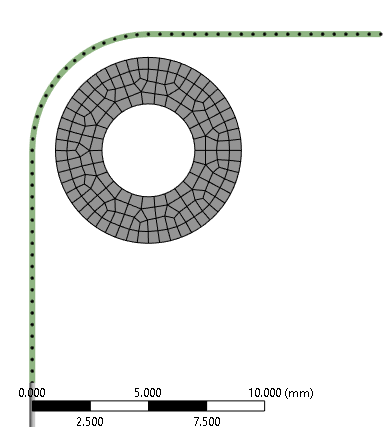
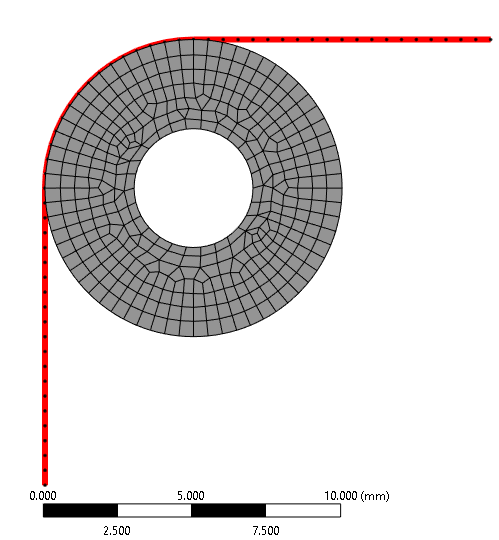
The nodes at the center of the sting do not penetrate the edges of the hole. I suggest you offset the hole surface by the radius of the string then the centerline of the string will be in the correct position when the nodes contact the offset surface. In the first image below, the surface has been offset to reach the nodes at the center of the string. If you turn off the thickness on the beams and shells, you can see that the nodes touch the surface.
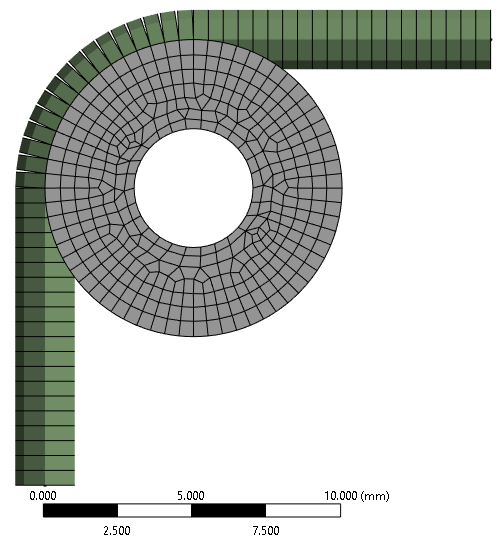
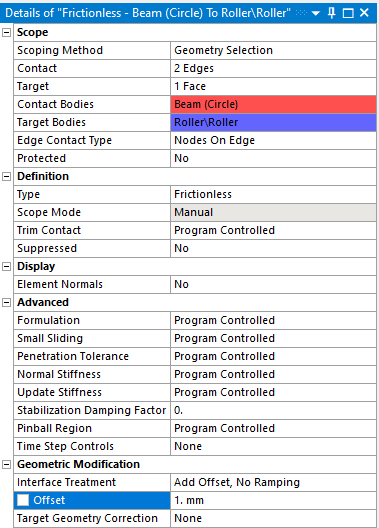
An alternative is to use a setting on the Contact Definition: Add Offset, No Ramping to the Interface Treatement under the Geometric Modification of the Frictionless Contact definition. In the image below, with the thickness turned on, it seems like the string sits on the roller. But in the next image, you can see that the nodes are offset from the surface.