Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Analysis of Robotic Finger › Reply To: Analysis of Robotic Finger
 peteroznewman
peteroznewman
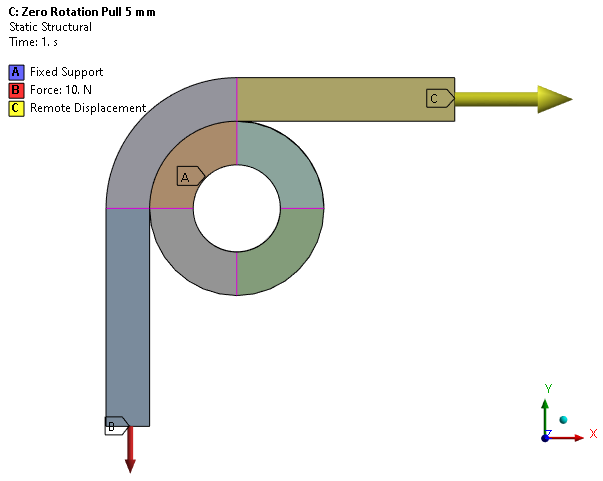
Rohith, I’m not sure you understood my point about using solid elements, linear elastic materials and drawing wire bent to conform to the path through the mechanism. The bends you draw in the wire remain in the wire as it is pulled around a roller. I created an example to show the behavior of the method you are using. It consists of a wire that has a 10 N downward (-Y) force on the bottom end of the wire that is drawn around a frictionless roller. The other end of the wire is pulled 5 mm along the +X direction. Contact is frictionless between the wire and the roller.
Here is the deformed shape at the end of the simulation.
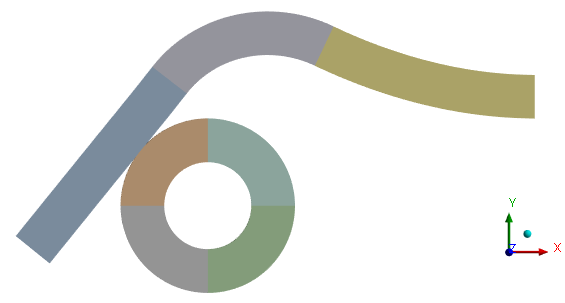
This model used solid elements, but you would get the same result with beam elements. I hope this makes my point clearly.
You could use the line bodies that allowed you to mesh with beam elements, but mesh with LINK180 elements instead, which have no rotational degrees of freedom and so you can draw them bent and they will straighten just like a bicycle chain straightens when the sprocket turns.



