Ansys Learning Forum › Forums › Discuss Simulation › General Mechanical › Rolling joint model check › Reply To: Rolling joint model check
September 26, 2023 at 11:50 am
 Paolo Langella
Paolo Langella
Subscriber
Hello Peter,
thanks for answering.
I thought about using cable280 but I couldn't find any material about how to properly set the contact between the elements of the wires (cable280) and those of the holes (solid).
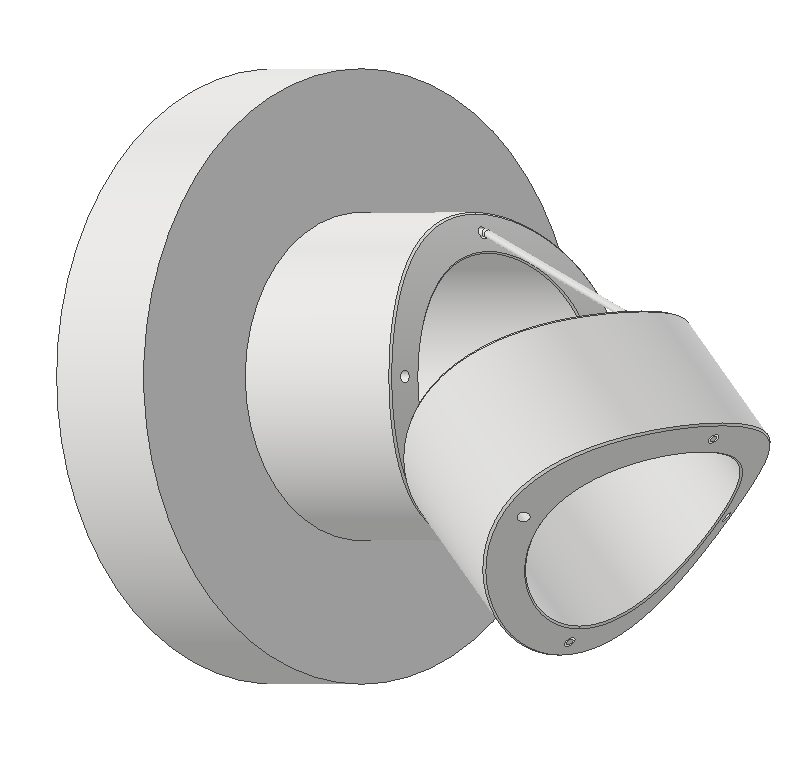
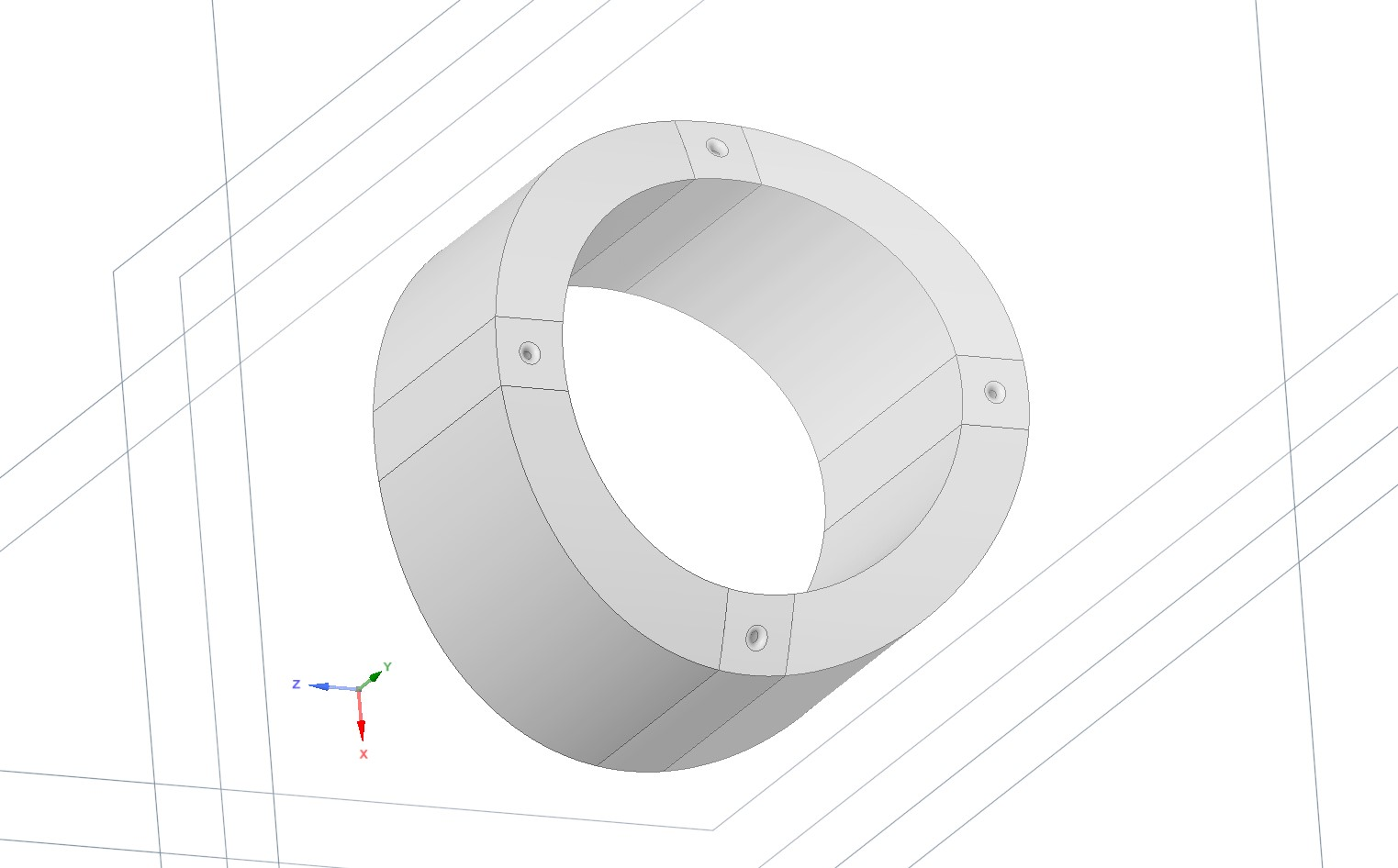
Also, I would like some suggestions about how to obtain an high quality mesh. I thought about splitting the link with 4 planes, with a fine mesh around the holes and a more coarse one elsewhere, but I am having some issues because of the shape of the bodies.
In the third point I mean that an alternative way of analyse the problem could be to chose a set of robot configurations and times es horizontal pose or an extreme pose and perform the analysis with a costant load instead of using a variable load to simulate the movement of the robot.