Ansys Learning Forum › Forums › Discuss Simulation › LS Dyna › How to perform two step dynamic analysis in Ansys Mechanical › Reply To: How to perform two step dynamic analysis in Ansys Mechanical
August 15, 2021 at 1:32 am
 peteroznewman
peteroznewman
Subscriber
I am looking at your model now. I see the version of ANSYS you used in the last iteration was 2020 R2, but I understand you have access to both versions, since I have been working in 2021 R1.
It may turn out to have a smoother motion if Earth Gravity was on in Step 1 then the motion began in Step 2.
Looking through the Solution Output, these warnings were issued:
*WARNING*: 24 MPC equations were released for the rigid constraint surface identified by real constant set 249 due to overconstraint detection logic.
*WARNING*: 24 MPC equations were released for the rigid constraintsurface identified by real constant set 265 due to overconstraintdetection logic.
*WARNING*: 6 MPC equations were released for the rigid constraintsurface identified by real constant set 269 due to overconstraintdetection logic.
I got those warnings too, and they mean that the solver has to ignore some of the things you asked it to do because it can't do two things at once: (1) Use a node in a joint and (2) use a node in a boundary condition. I eliminated those warnings by creating boundary conditions using nodes near the point when the joint was, while not using any nodes that were in the joint (on the edges). Not sure if it will make a difference in the output though.
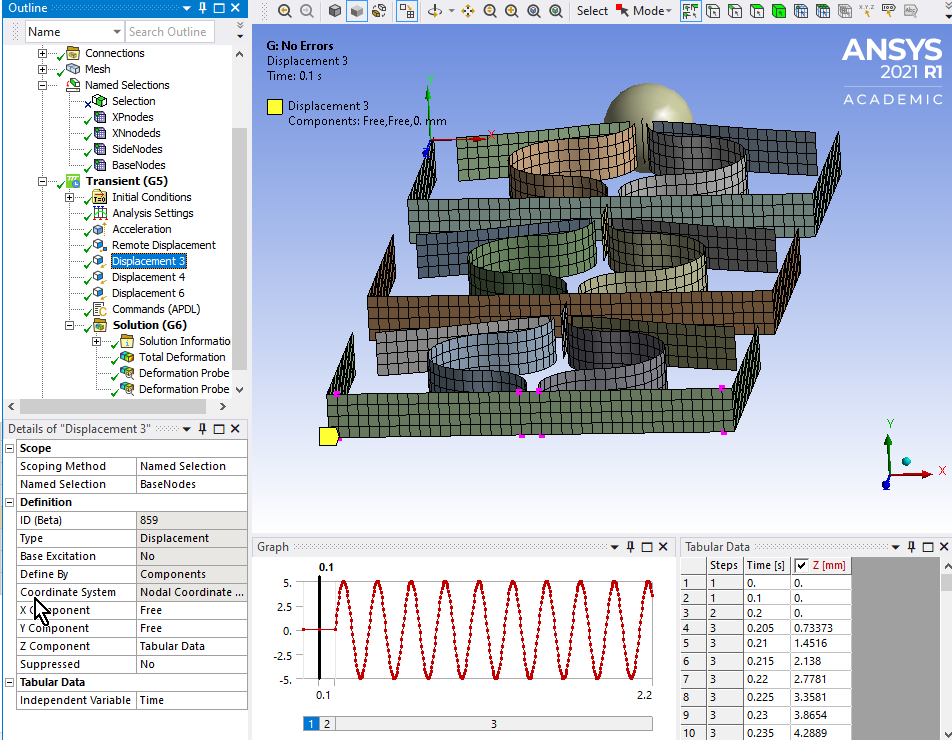
For example, since there is an edge in the center that is part of a Fixed Joint, I picked 8 nodes on the base to use in the Displacement 3.
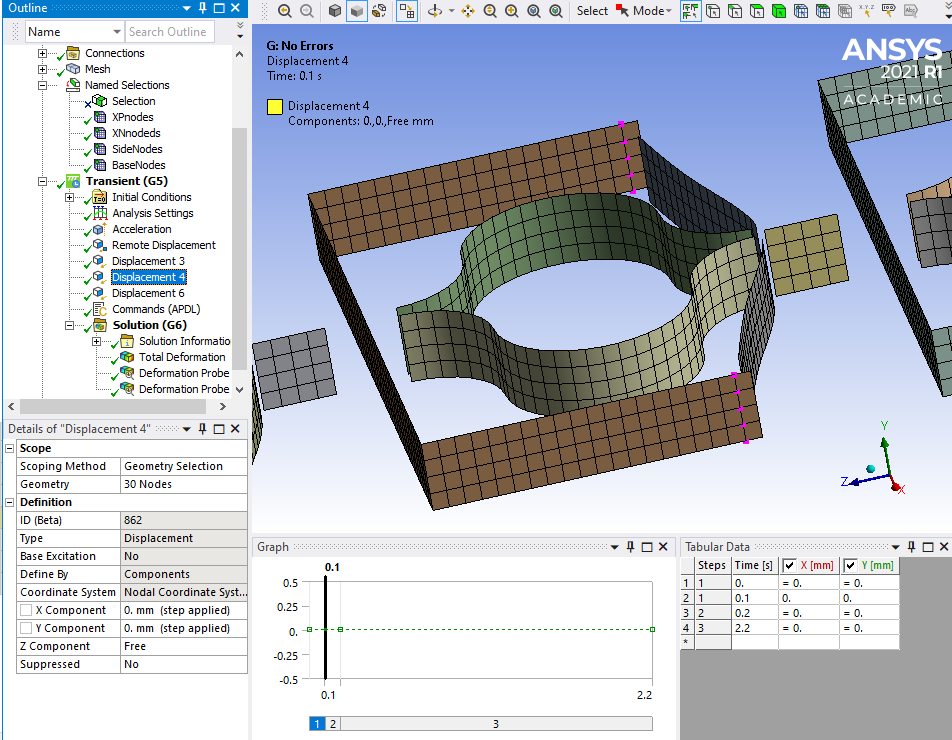
 In order to apply an X = 0 constraint to the vertical sides of the frame (frictionless support) without touching the nodes along the top edge that were involved in a Fixed Joint to the spring, I picked a row of nodes just below that and also a row along the bottom corner. I held both X and Y = 0 to keep the cells in the XZ plane.
In order to apply an X = 0 constraint to the vertical sides of the frame (frictionless support) without touching the nodes along the top edge that were involved in a Fixed Joint to the spring, I picked a row of nodes just below that and also a row along the bottom corner. I held both X and Y = 0 to keep the cells in the XZ plane.
It may turn out to have a smoother motion if Earth Gravity was on in Step 1 then the motion began in Step 2.
Looking through the Solution Output, these warnings were issued:
*WARNING*: 24 MPC equations were released for the rigid constraint surface identified by real constant set 249 due to overconstraint detection logic.
*WARNING*: 24 MPC equations were released for the rigid constraintsurface identified by real constant set 265 due to overconstraintdetection logic.
*WARNING*: 6 MPC equations were released for the rigid constraintsurface identified by real constant set 269 due to overconstraintdetection logic.
I got those warnings too, and they mean that the solver has to ignore some of the things you asked it to do because it can't do two things at once: (1) Use a node in a joint and (2) use a node in a boundary condition. I eliminated those warnings by creating boundary conditions using nodes near the point when the joint was, while not using any nodes that were in the joint (on the edges). Not sure if it will make a difference in the output though.
For example, since there is an edge in the center that is part of a Fixed Joint, I picked 8 nodes on the base to use in the Displacement 3.
In order to apply an X = 0 constraint to the vertical sides of the frame (frictionless support) without touching the nodes along the top edge that were involved in a Fixed Joint to the spring, I picked a row of nodes just below that and also a row along the bottom corner. I held both X and Y = 0 to keep the cells in the XZ plane.



